







本篇里面是结合有Armijio condition的实现,所以对步长的选取可能更好一些。
关于最速下降法的实现,在本人的另一篇博客里面也有实现,同时里面也简单介绍了本篇文章里面要实现的函数RosenBrock。
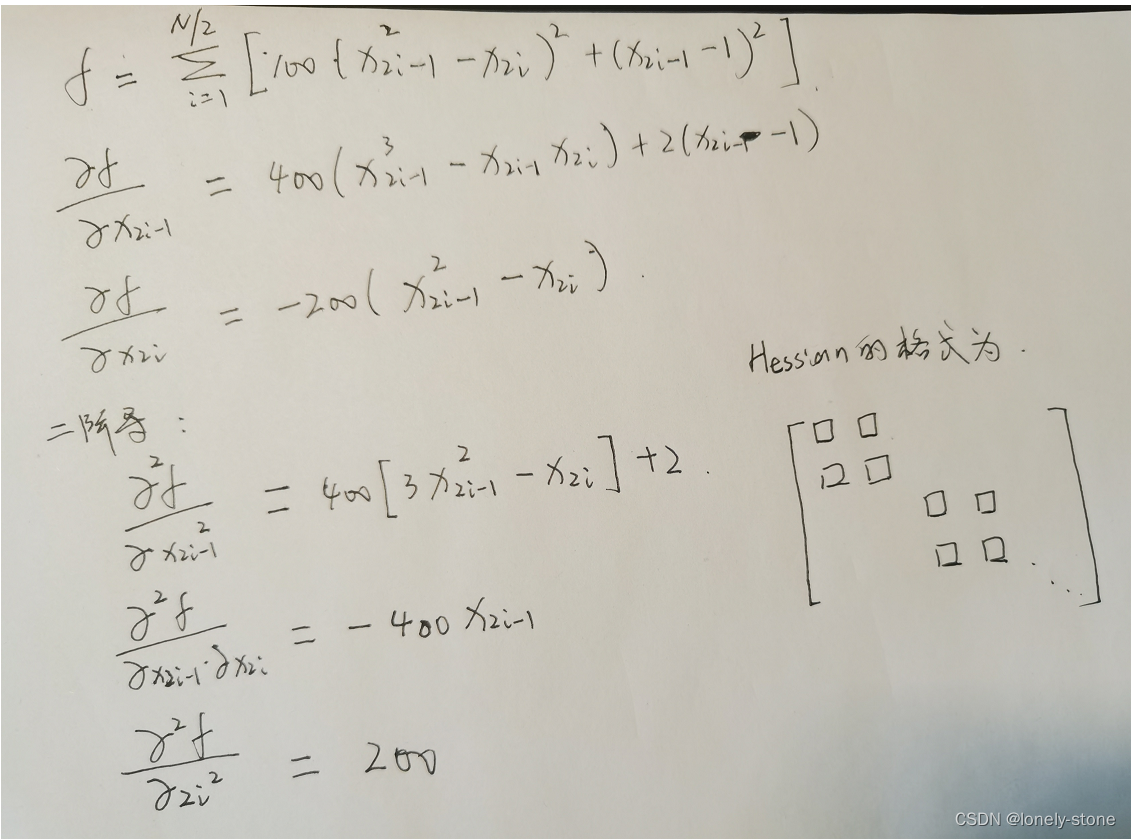
牛顿法是对函数进行二阶泰勒展开,会使用到函数的二阶高维信息,所以更精确一些,但随之而来的就是计算二维Hessian时带来的计算量,求逆矩阵时甚至达到了
O
(
n
3
)
O(n_3)
O(n3)。
以下是函数的梯度计算结果和Hessian计算结果:
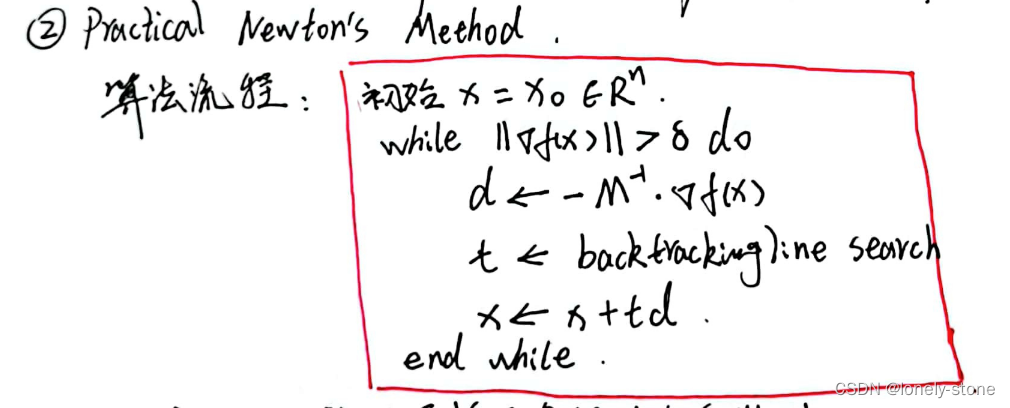
具体的牛顿法实现步骤在之前的博客里面也有介绍,这里我把流程截图了过来(请原谅没有太多时间把这些敲成latex公式)
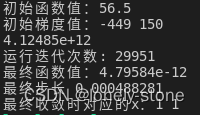
下图是输入为(1.5,3)时的输出:
具体代码实现:
#include<iostream>
#include<algorithm>
#include<fstream>
#include<iomanip>
#include<chrono>
#include<ctime>
#include<sstream>
#include<vector>
#include<cmath>
#include<iterator>
#include<map>
#include<string.h>
#include <complex>
#include <set>
#include <Eigen/StdVector>
#include <Eigen/Dense>
#include <Eigen/Core>
#include <unsupported/Eigen/MatrixFunctions>
using namespace std;
using namespace Eigen;
// 函数值
double RosenBrock(const Eigen::VectorXd x)
{
double res = 0.0;
for(int i = 0; i <= int(x.size()/2 - 1); ++i)
{
res += 100 * pow(pow(x(2*i),2) - x(2*i+1), 2) + pow(x(2*i) - 1, 2);
}
return res;
}
// 算函数梯度
Eigen::VectorXd gradient(const Eigen::VectorXd x)
{
Eigen::VectorXd res(x.size());
for(int i = 0; i <= int(x.size()/2 - 1); ++i)
{
res(2*i) = 400 * (pow(x(2*i), 3) - x(2*i)*x(2*i+1)) + 2 * (x(2*i) - 1);
res(2*i+1) = -200 * (pow(x(2*i), 2) - x(2*i+1));
}
return res;
}
// Hessian
Eigen::MatrixXd Hessian(const Eigen::VectorXd x)
{
Eigen::MatrixXd H(x.size(), x.size());
for(int i = 0; i < x.size()/2; ++i){
H(2*i,2*i) = 400 * (3 * pow(x(2*i), 2) - x(2*i+1)) + 2;
H(2*i,2*i+1) = -400 * x(2*i);
H(2*i+1,2*i) = -400 * x(2*i);
H(2*i+1,2*i+1) = 200;
}
return H;
}
int main() {
Eigen::VectorXd x(2);
x << 1.5,3;
cout <<"初始函数值:" << RosenBrock(x) <<endl;
// iteration initialization
double t = 1.0;
double c = 0.5;
double sigma = 1e-5;
Eigen::VectorXd gra = gradient(x);
Eigen::VectorXd d = gra * (-1);
cout <<"初始梯度值:";
for(int i = 0; i < x.size(); ++i) cout << gra(i) << " ";
cout << endl;
cout << RosenBrock(x + d) <<endl;
int cnt = 0;
while(sqrt(gra.adjoint()*gra) > sigma)
{
Eigen::VectorXd tt = gra * c *t;
double tmp = d.adjoint() * tt;
while(RosenBrock(x + d*t) > RosenBrock(x) + tmp)
{
// update
t /= 2;
tt = gra * c *t;
tmp = d.adjoint() * tt;
}
x += d*t;
Eigen::MatrixXd M = Hessian(x);
gra = gradient(x);
d = M.inverse() * gra * (-1);
++ cnt;
}
cout <<"运行迭代次数: "<< cnt <<endl;
cout << "最终函数值:" << RosenBrock(x) <<endl;
cout << "最终步长 " << t <<endl;
cout << "最终收敛时对应的x:";
for(int i = 0; i < x.size(); ++i) cout << x(i) << " ";
cout << endl;
return 1;
}
















 1253
1253











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









