






点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
作者丨黄浴@知乎
来源丨https://zhuanlan.zhihu.com/p/344409383
转载自:计算机视觉life
ArXiv论文 “PanoNet3D: Combining Semantic and Geometric Understanding for LiDAR Point Cloud Detection“,作者来自CMU RI 研究所。
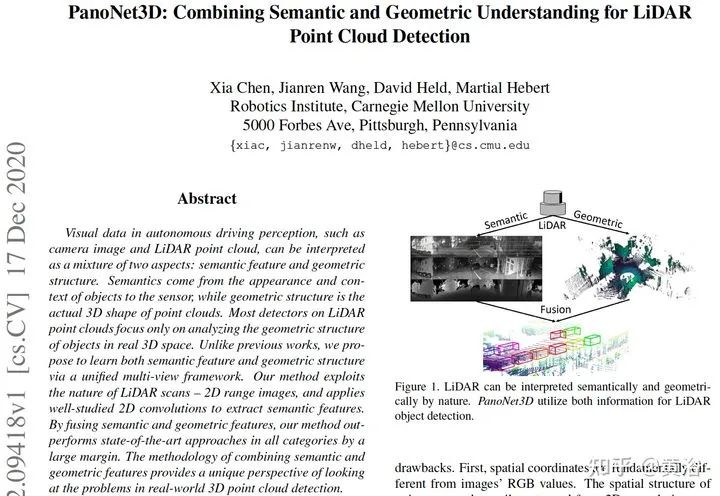
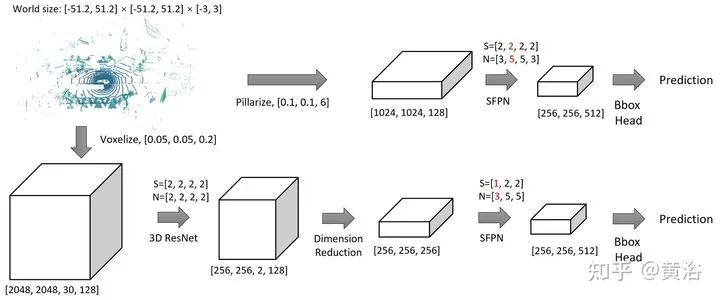
作者觉得大多数激光雷达检测方法只是利用目标几何结构,所以提出在一个多视角框架下学习目标的语义和结构特征,其利用激光雷达的特性,2D距离图像,以此提取语义特征。该方法PanoNet3D结构如图:
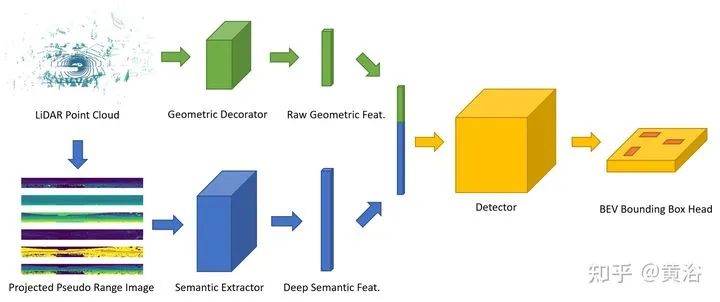
上面分支,LiDAR点云作为输入,用几个简单的局部几何特征修饰原始点特征,包括全局位置、局部相对所在体素中心的位移。
体素化有两种:1)3D正常体素化;2)pillarization,类似PointPillars。
下面分支,点云转换为伪距图像,类似LaserNet,得到结果如下图:5个通道,range r, height h, elevation angle theta, reflectance i, occupancy mask m。
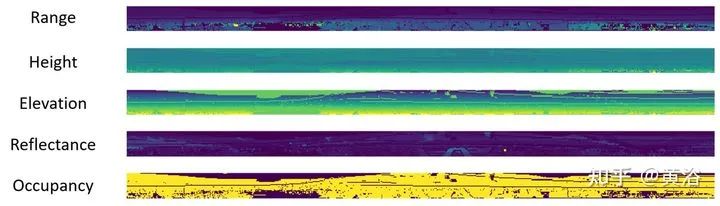
馈入2D Semantic FPN (SFPN),获取每个像素的深度语义特征。将两个分支输出特征汇总并传递到主检测器。最终的框头部在BEV平面生成检测建议。单步检测器,基于anchor,预测朝向框以及置信度得分。
文中提出了时域多帧融合和空域多帧融合,前者简单,后者需要选择关键帧,如图是一个例子
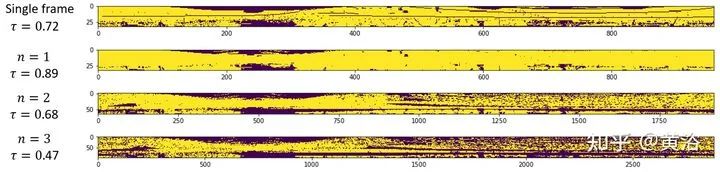
这里取两帧n=2做实验。
检测头设计如图:初始特征128维,整个场景大小限制为[-51.2, 51.2] [-51.2, 51.2] [-3, 3]米,分别在x-y-z方向。网络由ResNet基本块几层组成。S表示每层步幅,N表示块数。生成的SFPN特征图具有和该层同样分辨率的,标记为红色。可以是,3D voxelize输入或者pillarize再输入。
数据增强类似SECOND,cropped线下存储,做随机全局变换,如translation、scaling、rotation等。
该文实现是基于Det3D:CBGS开源库:https://link.zhihu.com/?target=https%3A//github.com/poodarchu/Det3D
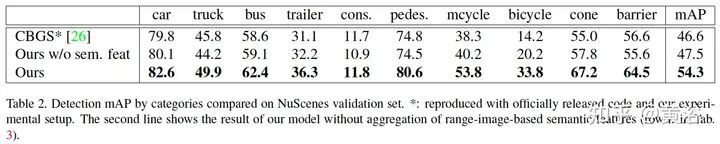
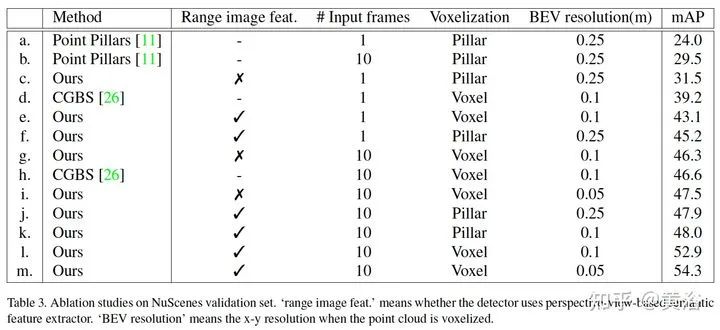
结果:

本文仅做学术分享,如有侵权,请联系删文。
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









