






点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达本文将编写一个 python 脚本,它获取图像并将其转换为扫描版本。
以下图为例
不要阅读页面上的文字,这些只是对这个项目的初步想法,其中很多可能很愚蠢
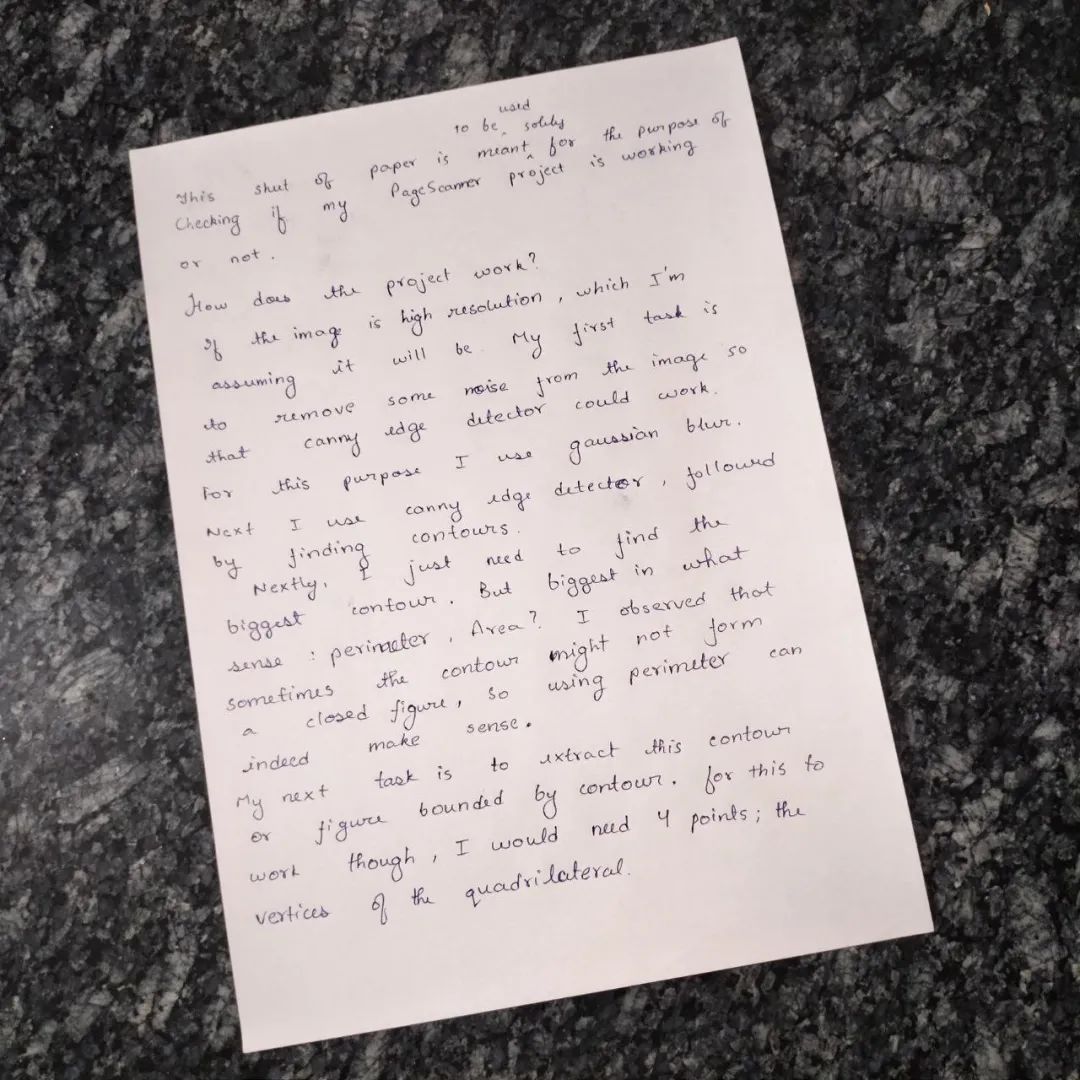
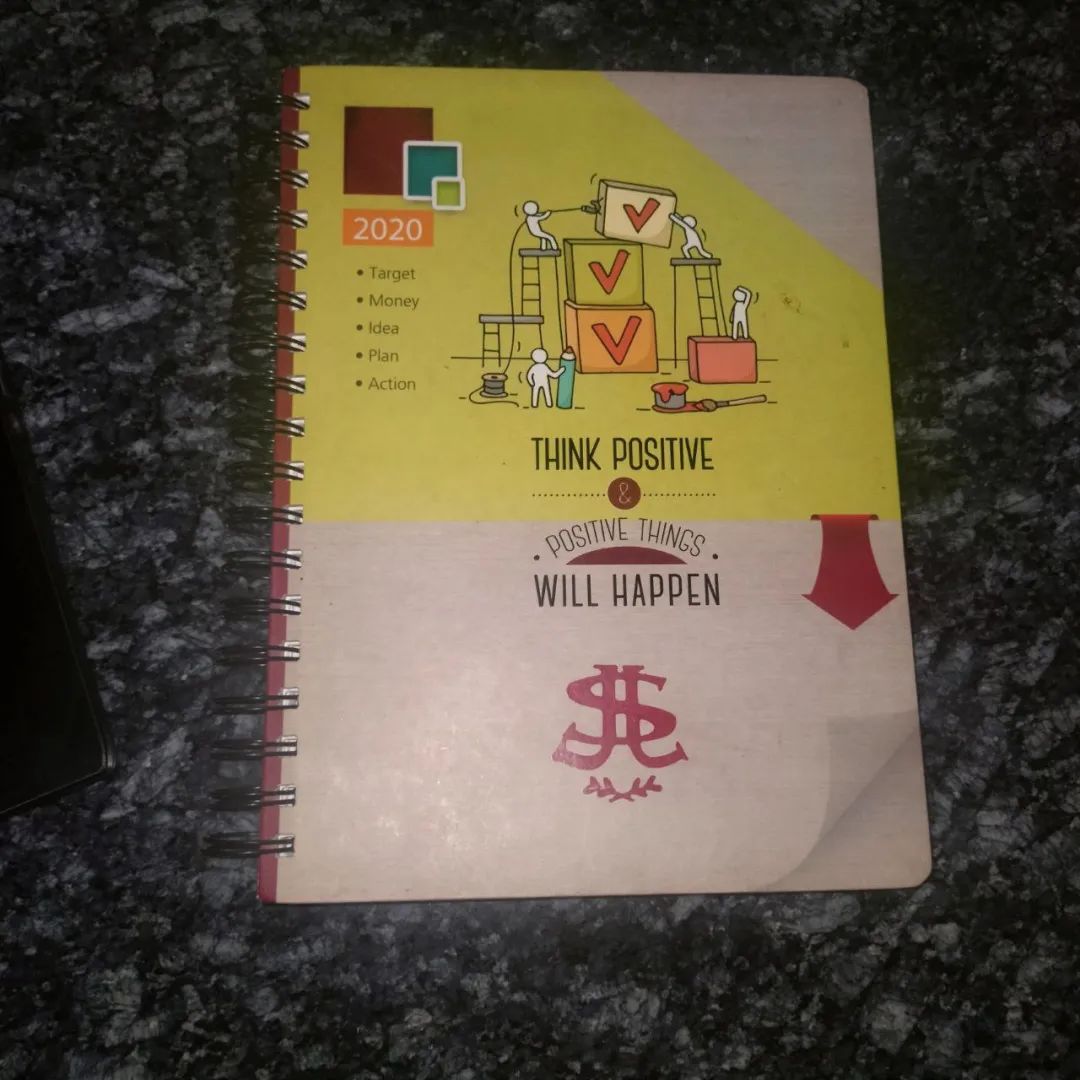
希望它看起来像是经过扫描的。所需的操作是从整个图像中裁剪页面图像,然后将其转换为黑白(二进制)。该项目所需的库是
# Importing essential libraries
import numpy as np
import cv2我们的第一步是找到页面的边缘,为此我们需要OpenCV 库中的findContours。为此,我们首先需要将图像转换为灰度图像并使用 Canny 边缘检测器。
img = cv2.imread("image.jpg")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
cv2.imshow("gray", gray)
cv2.waitKey(0)
cv2.destroyAllWindows()接下来,我们将对图像进行去噪,以使 Canny 边缘检测器表现更好。如果内核大小不是默认值,OpenCV 实现将在内部使用高斯模糊过滤器。由于在本文中我没有费心更改cv2.Canny的内核大小,因此我必须手动进行。
# if we pass variance as 0, it calculates variance based on the kernel size
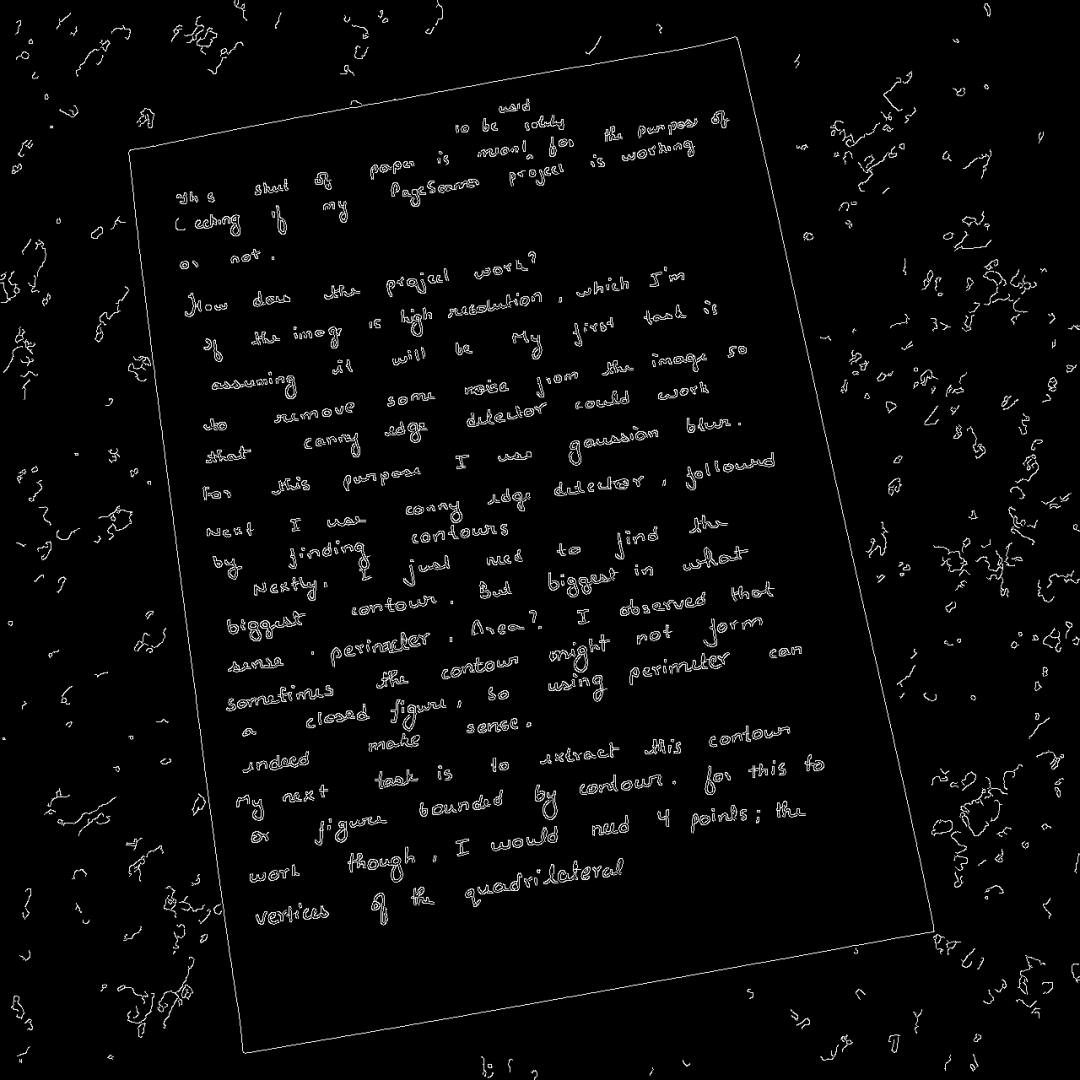
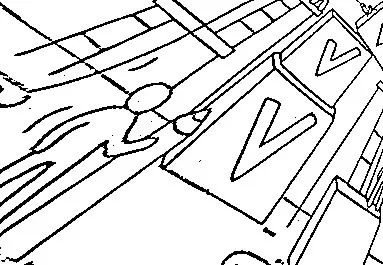
blur = cv2.GaussianBlur(gray, (3,3), 0)接下来,我们将使用 Canny 边缘检测器
edged = cv2.Canny(blur, 100, 255)
cv2.imshow("edged", edged)
cv2.waitKey(0)
cv2.destroyAllWindows()输出看起来像
接下来,我们需要从图像中裁剪页面。为此,我们首先要找到一个标记页面圆周的轮廓。这可以通过OpenCV 中的findContours方法来实现
# RETR_LIST mode returns a list of contours
# CHAIN_APPROX_SIMPLE returns fewer points in the contour saving memory
contours, _ = cv2.findContours(edged, mode = RETR_LIST, method = cv2.CHAIN_APPROX_SIMPLE)
cv2.drawContours(img, contours, -1, (0,255,0), 5)
cv2.imshow("contours", img)
cv2.waitKey(0)
cv2.destroyAllWindows()输出如下
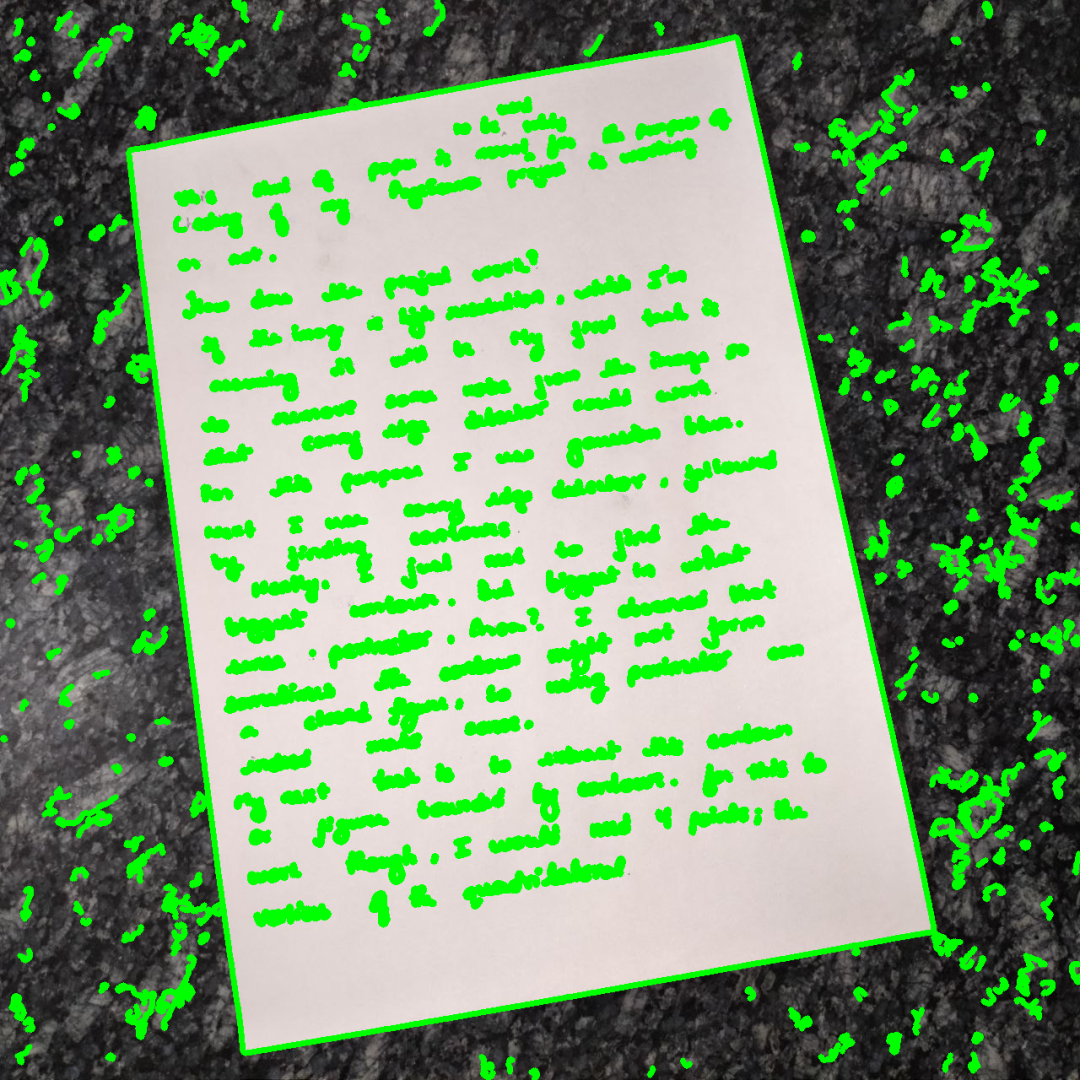
这不是我们想要的,我们只想要页面圆周周围的大轮廓,我们可以通过将轮廓按其覆盖的区域排序得到所需的轮廓,然后选择覆盖最大区域的轮廓。
contours, _ = cv2.findContours(edged, mode = RETR_LIST, method = cv2.CHAIN_APPROX_SIMPLE)
cnt = sorted(contours, key = cv2.contourArea)[-1]
cv2.drawContours(img, [cnt], -1, (0,255,0), 5)
cv2.imshow("contours", img)
cv2.waitKey(0)
cv2.destroyAllWindows()结果看起来像
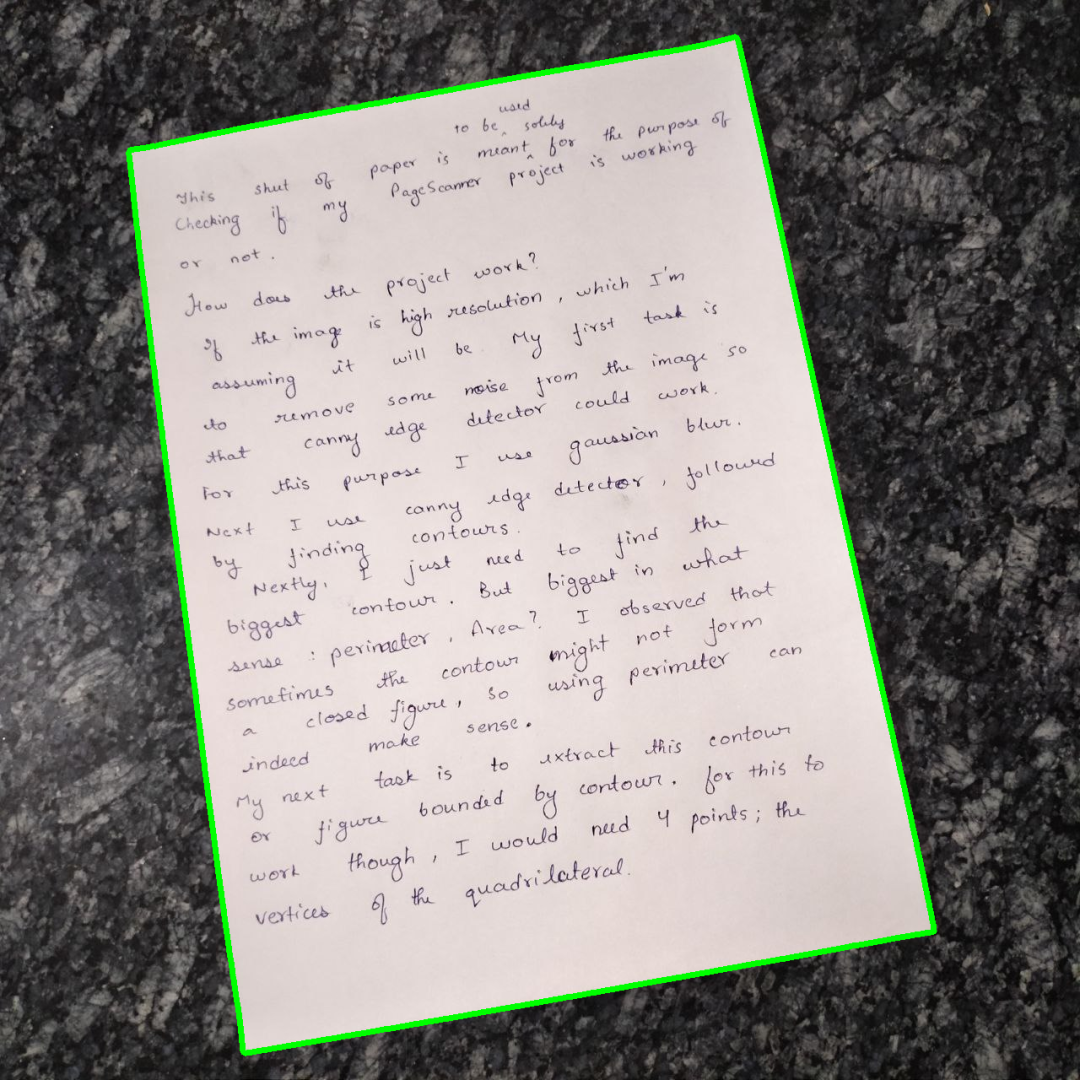
这还差不多!下一个任务是裁剪掉这部分,页面的图像不是矩形的,顶部的宽度比底部的小一点。我们需要把它变成一个完美的矩形。
幸运的是,OpenCV 也支持这一操作。首先,我们需要找到要将图像转换成的矩形的高度和宽度。我们可以简单地使用OpenCV 库中的minAreaRect方法来做到这一点
_, (w,h), angle = cv2.minAreaRect(cnt)
# w,h are floats, we would need to convert them to int first
w,h = int(w), int(h)
if angle > 45 or angle < -45:
w,h = h,w
# the shape of cnt is (4,1,2) so for ease later on
# i will reshape it to (4,2)
cnt = cnt.reshape(cnt.shape[0], cnt.shape[-1])
# the four corners are the ones that have either extreme
# x-coordinate or extreme y-coordinate
s1 = sorted(cnt, key = lambda x : (x[0], x[1]))
s2 = sorted(cnt, key = lambda x : (x[1], x[0]))
corner1, corner3 = s1[0], s1[-1]
corner2, corner4 = s2[0], s2[-1]
corners = np.array([corner1, corner2, corner3, corner4])
target_corners = np.array([(0,0), (w,0), (w,h), (0,h)])
H, _ = cv2.findHomography(corners, target_corners, params = None)
transformed_image = cv2.warpPerspective(
img, H,
(img.shape[1],
img.shape[0]))
# cropping the image out
transformed_image = transformed_image[:h, :w]
cv2.imshow("contours", transformed_image)
cv2.waitKey(0)
cv2.destroyAllWindows()请注意,编写了以下代码行
if angle > 45 or angle < -45:
w,h = h,w我们这样做是因为在 OpenCV v4.5+ 中,角度是在正 x 轴和逆时针旋转的矩形之间测量的。
裁剪后的图像如下所示
现在,我们要做的就是再次使用高斯滤波器将其转换为黑白图像。
T = cv2.GaussianBlur(img, (11,11),0)-10
img = (img > T).astype(np.uint8) * 255
cv2.imwrite("transformed.jpg", img)最终输出
它不像看起来那么好
这是另一张图片
转换后的图像是
是的,这太可怕了。但也许改善结果就不一样了。
完整代码:https://github.com/cmaspi/PageScanner
参考
https://www.youtube.com/watch?v=C_zFhWdM4ic
https://www.youtube.com/watch?v=uihBwtPIBxM
https://www.youtube.com/watch?v=sRFM5IEqR2w
好消息!
小白学视觉知识星球
开始面向外开放啦👇👇👇

下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~














 911
911











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









