







官方中文教程
概念理解:
- rosout:相当于stdout/stderr
stdout – 标准输出设备 (printf("…")) 同 stdout。
stderr – 标准错误输出设备
两者默认向屏幕输出。
但如果用转向标准输出到磁盘文件,则可看出两者区别。stdout输出到磁盘文件,stderr在屏幕。 - roscore: 主机+ rosout + 参数服务器
- rospy = python 客户端库
- roscpp = c++ 客户端库
三大命令:
- 使用roscore:roscore 是你在运行所有ROS程序前首先要运行的命令。
命令行:~$ roscore
显示如下:
li@li-Lenovo:~$ roscore
... logging to /home/li/.ros/log/7943f016-b37e-11ea-aa6f-c83dd494a8c1/roslaunch-li-Lenovo-11581.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://li-Lenovo:45017/
ros_comm version 1.14.5
SUMMARY
========
PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.5
NODES
auto-starting new master
process[master]: started with pid [11591]
ROS_MASTER_URI=http://li-Lenovo:11311/
setting /run_id to 7943f016-b37e-11ea-aa6f-c83dd494a8c1
process[rosout-1]: started with pid [11602]
started core service [/rosout]
- 使用rosnode:获取节点信息
li@li-Lenovo:~$ rosnode
rosnode is a command-line tool for printing information about ROS Nodes.
Commands:
rosnode ping test connectivity to node
rosnode list list active nodes
rosnode info print information about node
rosnode machine list nodes running on a particular machine or list machines
rosnode kill kill a running node
rosnode cleanup purge registration information of unreachable nodes
Type rosnode <command> -h for more detailed usage, e.g. 'rosnode ping -h'
- 使用 rosrun:跑来自命令行中被给软件包中的一个节点
Usage:
$ rosrun [package_name] [node_name]
"""通过命令行重新配置名称"""
$ rosrun [package_name] [node_name]:=my_turtle
ROS话题,它来了,它来了,它真的大摇大摆的走来了!
实现publishing 和 subscribe 之间的互相通信
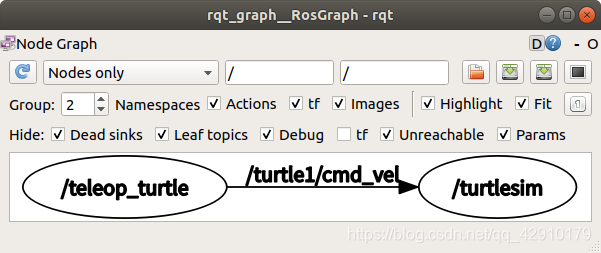
中间的/turtle1/cmd_vel相当于ROS Topics
其他的内容跟着教程走就可以,不难,enjoy!














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









