







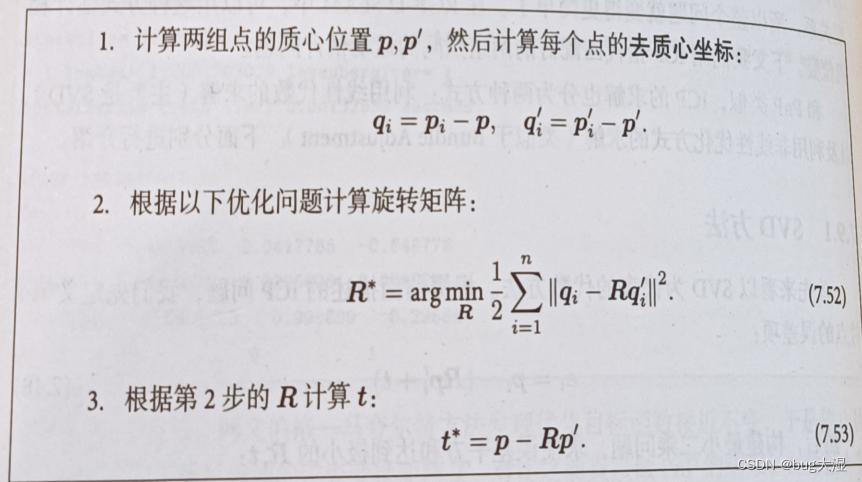
C++实现经典的点云配准算法——ICP,根据高博视觉14讲的推导(具体过程看书,还是很好理解的),ICP的计算过程如下所示:
具体的C++代码实现如下:
void pose_estimation_3d3d (
const vector<Point3f>& pts1,
const vector<Point3f>& pts2,
Mat& R, Mat& t
)
{
Point3f p1, p2; // center of mass
int N = pts1.size();
for ( int i=0; i<N; i++ )
{
p1 += pts1[i];
p2 += pts2[i];
}
p1 = Point3f( Vec3f(p1) / N);
p2 = Point3f( Vec3f(p2) / N);
vector<Point3f> q1 ( N ), q2 ( N ); // remove the center
for ( int i=0; i<N; i++ )
{
q1[i] = pts1[i] - p1;
q2[i] = pts2[i] - p2;
}
// compute q1*q2^T
Eigen::Matrix3d W = Eigen::Matrix3d::Zero();
for ( int i=0; i<N; i++ )
{
W += Eigen::Vector3d ( q1[i].x, q1[i].y, q1[i].z ) * Eigen::Vector3d ( q2[i].x, q2[i].y, q2[i].z ).transpose();
}
cout<<"W="<<W<<endl;
// SVD on W
Eigen::JacobiSVD<Eigen::Matrix3d> svd ( W, Eigen::ComputeFullU|Eigen::ComputeFullV );
Eigen::Matrix3d U = svd.matrixU();
Eigen::Matrix3d V = svd.matrixV();
if (U.determinant() * V.determinant() < 0)
{
for (int x = 0; x < 3; ++x)
{
U(x, 2) *= -1;
}
}
cout<<"U="<<U<<endl;
cout<<"V="<<V<<endl;
Eigen::Matrix3d R_ = U* ( V.transpose() );
Eigen::Vector3d t_ = Eigen::Vector3d ( p1.x, p1.y, p1.z ) - R_ * Eigen::Vector3d ( p2.x, p2.y, p2.z );
// convert to cv::Mat
R = ( Mat_<double> ( 3,3 ) <<
R_ ( 0,0 ), R_ ( 0,1 ), R_ ( 0,2 ),
R_ ( 1,0 ), R_ ( 1,1 ), R_ ( 1,2 ),
R_ ( 2,0 ), R_ ( 2,1 ), R_ ( 2,2 )
);
t = ( Mat_<double> ( 3,1 ) << t_ ( 0,0 ), t_ ( 1,0 ), t_ ( 2,0 ) );
}















 227
227











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









