







zed双目摄像头 +yolo进行双目测距
首先根据你电脑或者jetson系列中的cuda版本下载对应的zed sdk,去安装zed api
安装过程可能会出现import pyzed.sl as sl
ImportError: DLL load failed: 找不到指定的模块。
这时候就要看看是不是没有安装到zed api 其中可能numpy版本对应不上解决方法
https://blog.csdn.net/qq_42980111/article/details/123708176?spm=1001.2014.3001.5501
,由于zed双目摄像头出厂就标定好了,因此我没有再进行标定直接运行下面的zedceju就行了
https://download.csdn.net/download/qq_42980111/86398944
其原理:yolo找到目标进行识别,框出其目标物体,得到目标物中点以及位置信息,
利用zed获取其深度消息和点云数据,由点云数据计算欧式距离,就能得到物体距离左边相机的距离
欧氏距离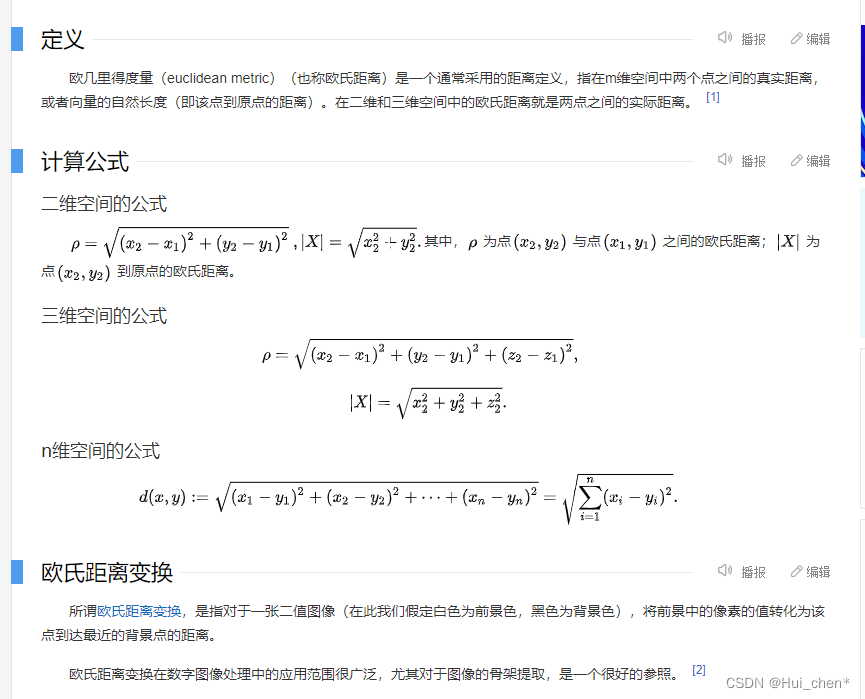
基础:
1.视差就是从有一定距离的两个点上观察同一个目标所产生的方向差异。从目标看两个点之间的夹角,叫做这两个点的视差角,两点之间的连线称作基线。只要知道视差角度和基线长度,就可以计算出目标和观测者之间的距离。
2.物体距离越远,视差越小;反之,视差越大















 144
144











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









