







PatchmatchNet: Learned Multi-View Patchmatch Stereo
一、Overview
1.特点
1.较高的计算速度;
2.较低的内存需求;
3.比采用3D代价体正则化的方法更适合在资源有限的设备上运行。
2.贡献
1.将Patchmatch理念引入端到端的MVS框架;
2.使用可学习的自适应模块增强Patchmatch的传播和代价评估步骤,在代价聚合时估计了可见性信息;

二、Network
Overlook
0.1 网络结构
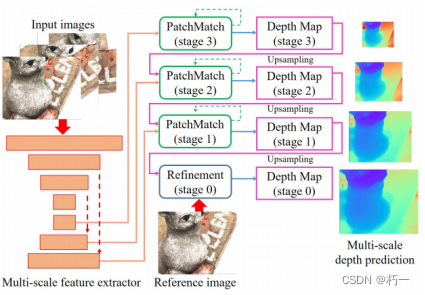
1.特征金字塔分别提取1/8、1/4、1/2特征图;
2.从低分辨率到高分辨率逐阶段细化深度图;
3.在每个阶段(stage),使用patchmatch模块迭代推理深度图;
4.在1/1分辨率,使用一个优化网络上采样并细化深度图。
0.2 net.py
import torch
import torch.nn.functional as F
class CoreNet(torch.nn.Module):
def __init__(self, stages, Backbone, scale, Patchmatchs, Refinenet, Calconfidence):
super(CoreNet, self).__init__()
self.stages = stages
self.Backbone = Backbone
self.scale = scale
self.Patchmatchs = Patchmatchs
self.Refinenet = Refinenet
self.Confidence_regress = Calconfidence
print('{} parameters: {}'.format(self._get_name(), sum([p.data.nelement() for p in self.parameters()])))
def forward(self, origin_imgs, extrinsics, intrinsics, depth_range):
"""
predict depth
@param origin_imgs: (B,VIEW,C,H,W) view0 is ref img
@param extrinsics: (B,VIEW,4,4)
@param intrinsics: (B,VIEW,3,3)
@param depth_range: (B, 2) B*(depth_min, depth_max) dtu: [425.0, 935.0] tanks: [-, -]
@return:
"""
origin_imgs = torch.unbind(origin_imgs.float(), 1) # VIEW*(B,C,H,W)
# 0. feature extraction
featuress = [self.Backbone(img) for img in origin_imgs] #views * 3 * fea
view_weights = None
depths, score_volume, depth_hypos, depthss = [None,], None, None, []
for stage in range(self.stages-1):
# 1. get features
features = [fea[stage] for fea in featuress]
# 2.scale intrinsic matrix & cal proj matrix
ref_proj, src_projs = self.scale(intrinsics, extrinsics, stage)
# 3.patchmatch
depths, score_volume, view_weights, depth_hypos = self.Patchmatchs[stage](
features, ref_proj, src_projs, depth_range, depths[-1], view_weights, score_volume, depth_hypos)
depthss.append(depths)
depth = self.Refinenet(origin_imgs[0], depths[-1].unsqueeze(1), depth_range)
depthss.append(depth)
if self.training:
return {"depth": depthss, }
confidence = self.Confidence_regress(score_volume)
confidence = F.interpolate(confidence.unsqueeze(1), scale_factor=2.0, mode="nearest").squeeze(1)
return {"depth": depths[-1], "confidence": confidence}
if __name__=="__main__":
pass
0.3 patchmatch结构
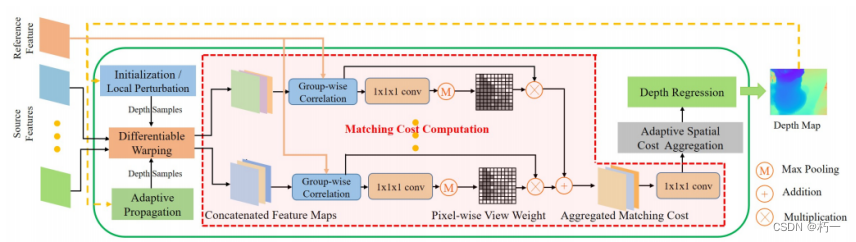
优势:
1.3DCNN正则化要求体素中具有规则的空间结构,但多尺度方法不具备这样的结构(除第一次迭代以外)。
1)每个像素和其空间邻域的深度假设不同,难以在空间域中聚合代价(h,w维度);
2)每个像素的深度假设不像CIDER那样均匀分布在反向深度范围内,这使得难以沿深度维度聚合成本信息(深度维度)。
2.提高效率。
0.4 patchmatch.py
from typing import List, Tuple
import torch
import torch.nn as nn
import torch.nn.functional as F
import depthhypos, propagation, evaluation
class PatchMatch(nn.Module):
def __init__(self,
stage_iters: int = 2,
in_chs: int = 64,
ngroups: int = 8,
ndepths: int = 16,
propagate: bool = True,
propagate_neighbors: int = 16,
propagation_out_range: int = 2,
evaluate_neighbors: int = 9,
interval_scale: float = 0.25,
) -> None:
super(PatchMatch, self).__init__()
self.stage_iters = stage_iters
self.ndepths = ndepths
self.propagate = propagate
self.interval_scale =interval_scale
self.Initialization = depthhypos.DepthInitialization(ndepths) #curve_hypos
self.Propagation = propagation.Propagation(in_chs, propagate_neighbors, propagation_out_range)
self.Evaluation = evaluation.Evaluation(in_chs, evaluate_neighbors, propagation_out_range, ngroups, interval_scale)
print('{} parameters: {}'.format(self._get_name(), sum([p.data.nelement() for p in self.parameters()])))
def forward(
self,
features: List[torch.Tensor],
ref_proj: torch.Tensor,
src_projs: List[torch.Tensor],
depth_range: torch.Tensor,
depth: torch.Tensor,
view_weights: torch.Tensor,
score: torch.Tensor,
depth_hypos:torch.Tensor,
) -> Tuple[List[torch.Tensor], torch.Tensor, torch.Tensor, torch.Tensor]:
B = depth_range.shape[0]
depth_min, depth_max = depth_range[:, 0].float(), depth_range[:, 1].float()
# reuse view weights
if view_weights is not None and depth is not None:
depth = F.interpolate(depth.unsqueeze(1).detach(), scale_factor=2, mode="nearest").squeeze(1)
view_weights = F.interpolate(view_weights, scale_factor=2.0, mode="nearest")
ref_feature, src_features = features[0], features[1:] # (B,C,H,W),(nviews-1)*(B,C,H,W)
batch, _, height, width = ref_feature.size()
feature_weight, s, depths = None, None, [] # view_weight None , feature_weight, each iter singal cal
for iter in range(1, self.stage_iters + 1):
# 1.Initialization
depth_hypos = self.Initialization(
min_depth=depth_min,
max_depth=depth_max,
height=height,
width=width,
depth_interval_scale=self.interval_scale,
device=depth_range.device,
depth=depth,
)
# 2.Propagation
if self.propagate:
depth_hypos = self.Propagation(iter, ref_feature, depth_hypos,)
# 3.Evaluation
depth, score, view_weights\
= self.Evaluation(iter, features, ref_proj, src_projs, view_weights, depth_hypos, depth_range)
depths.append(depth)
return depths, score, view_weights, depth_hypos
1. Initialization and Local Perturbation
1.首次深度假设:在深度范围[dmin,dmax]的逆深度范围进行均匀采样。有助于模型适用于大规模复杂场景。这里对深度假设加了一个随机值。
2.后续的深度假设:在深度值附近的一个给定范围假设,同样适用逆深度。围绕之前的估计值进行假设可以局部细化结果并纠正错误的估计值。
1.1 depthhypos.py
import torch
import torch.nn as nn
import torch.nn.functional as F
from typing import List, Tuple
class DepthInitialization(nn.Module):
"""Initialization Stage Class"""
def __init__(self, patchmatch_num_sample: int = 1) -> None:
"""Initialize method
Args:
patchmatch_num_sample: number of samples used in patchmatch process
"""
super(DepthInitialization, self).__init__()
self.patchmatch_num_sample = patchmatch_num_sample
def forward(
self,
min_depth: torch.Tensor,
max_depth: torch.Tensor,
height: int,
width: int,
depth_interval_scale: float,
device: torch.device,
depth: torch.Tensor = torch.empty(0),
) -> torch.Tensor:
"""Forward function for depth initialization
Args:
min_depth: minimum virtual depth, (B, )
max_depth: maximum virtual depth, (B, )
height: height of depth map
width: width of depth map
depth_interval_scale: depth interval scale
device: device on which to place tensor
depth: current depth (B, 1, H, W)
Returns:
depth_sample: initialized sample depth map by randomization or local perturbation (B, Ndepth, H, W)
"""
batch_size = min_depth.size()[0]
inverse_min_depth = 1.0 / min_depth
inverse_max_depth = 1.0 / max_depth
if depth is None:
# first iteration of Patchmatch on stage 3, sample in the inverse depth range
# divide the range into several intervals and sample in each of them
patchmatch_num_sample = 48
# [B,Ndepth,H,W]
depth_sample = torch.rand(
size=(batch_size, patchmatch_num_sample, height, width), device=device
) + torch.arange(start=0, end=patchmatch_num_sample, step=1, device=device).view(
1, patchmatch_num_sample, 1, 1
)
depth_sample = inverse_max_depth.view(batch_size, 1, 1, 1) + depth_sample / patchmatch_num_sample * (
inverse_min_depth.view(batch_size, 1, 1, 1) - inverse_max_depth.view(batch_size, 1, 1, 1)
)
return 1.0 / depth_sample
elif self.patchmatch_num_sample == 1:
return depth.detach()
else:
# otheder Patchmatch, local perturbation is performed based on previous result
# uniform samples in an inversed depth range
depth_sample = (
torch.arange(-self.patchmatch_num_sample // 2, self.patchmatch_num_sample // 2, 1, device=device)
.view(1, self.patchmatch_num_sample, 1, 1).repeat(batch_size, 1, height, width).float()
)
inverse_depth_interval = (inverse_min_depth - inverse_max_depth) * depth_interval_scale
inverse_depth_interval = inverse_depth_interval.view(batch_size, 1, 1, 1)
# print(depth.shape, inverse_depth_interval.shape)
depth_sample = 1.0 / depth.unsqueeze(1).detach() + inverse_depth_interval * depth_sample
depth_clamped = []
del depth
for k in range(batch_size):
depth_clamped.append(
torch.clamp(depth_sample[k], min=inverse_max_depth[k], max=inverse_min_depth[k]).unsqueeze(0)
)
return 1.0 / torch.cat(depth_clamped, dim=0)
2. Adaptive Propagation
理念:将处于同一平面的邻近点的深度值添加到中心点的深度假设,有助于更快的收敛。
方法:
1.使用一个2D CNN网络,以参考图像特征图为输入,计算与中心点同一表面的邻近点其像素坐标与中心点的偏移量;
2.计算邻近点像素坐标,将其深度(上一次迭代深度图中的深度)加入当前的深度假设。
2.1 propagation.py
import torch
import torch.nn as nn
import torch.nn.functional as F
from patchbase import get_grid
class Propagation(nn.Module):
def __init__(self,
in_chs,
neighbors,
dilation,
):
super(Propagation, self).__init__()
self.neighbors = neighbors
self.dilation = dilation
self.grid_type = {"propagation": 1, "evaluation": 2}
self.propa_conv = nn.Conv2d(
in_channels=in_chs,
out_channels=max(2 * neighbors, 1),
kernel_size=3,
stride=1,
padding=dilation,
dilation=dilation,
bias=True,
)
nn.init.constant_(self.propa_conv.weight, 0.0)
nn.init.constant_(self.propa_conv.bias, 0.0)
self.propa_grid = None #Save variables as attributes for reuse in same iter
def forward(self,
iter,
ref_feature: torch.Tensor,
depth_hypos: torch.Tensor,
): #[batch, num_depth+num_neighbors, height, width]
B, C, H, W = ref_feature.shape
device = ref_feature.device
if iter == 1:
# 1. the learned additional 2D offsets for adaptive propagation
# last iteration on stage 1 does not have propagation (photometric consistency filtering)
propa_offset = self.propa_conv(ref_feature).view(B, 2 * self.neighbors, H * W)
self.propa_grid = get_grid(self.grid_type["propagation"], B, H, W, propa_offset, device, self.neighbors, 0, self.dilation)
if depth_hypos.shape[-1] == 1:
return depth_hypos#.repeat(1, 1, H, W)
# adaptive propagation
# if self.propagate_neighbors > 0 and not (self.stage == 1 and iter == self.patchmatch_iteration):
# last iteration on stage 1 does not have propagation (photometric consistency filtering)
batch, num_depth, height, width = depth_hypos.size()
num_neighbors = self.propa_grid.size()[1] // height
# num_depth//2 is nearest depth map
propagate_depth_hypos = F.grid_sample(
depth_hypos[:, num_depth // 2, :, :].unsqueeze(1), self.propa_grid,
mode="bilinear", padding_mode="border", align_corners=False
).view(batch, num_neighbors, height, width)
return torch.sort(torch.cat((depth_hypos, propagate_depth_hypos), dim=1), dim=1)[0]
3.Adaptive Evaluation
3.1代价体的构建
1.使用可微的单应性变化扭曲特征图;
2.使用分组内积的方式聚合代价体,并引入可见性权重(使用一个共享权重的2D CNN网络计算,只使用第一次计算的可见性权重,之后直接使用或上采样使用);
3.计算加权平均值。


3.2 Adaptive Spatial Cost Aggregation
理念:与自适应传播相似,使用邻域点计算匹配代价。(传统的MVS匹配算法通常会在一个空间窗口上聚合代价,以提高匹配鲁棒性和隐式平滑效果等。)
方法:
1.使用一个2D CNN网络计算同一平面邻域点的坐标偏移量。
2.计算邻域点坐标并计算其权重;
2.使用一个相似性计算网络(3D CNN,简化了正则化网络,将特征维度降为1)计算概率体;
3.根据邻域点计算加权概率体。

3.3 Depth Regression
1.深度图:使用常用的soft argmin
2.概率图:也是用常用的四邻域加和。
3.4 evaluation.py
from typing import List, Tuple
import torch
import torch.nn as nn
import torch.nn.functional as F
from patchbase import get_grid, ConvBnReLU3D
class Evaluation(nn.Module):
def __init__(self,
in_chs,
neighbors, #9
dilation,
ngroups: int,
interval_scale,
):
super(Evaluation, self).__init__()
self.ngroups = ngroups
self.neighbors = neighbors
self.dilation = dilation
self.grid_type = {"propagation": 1, "evaluation": 2}
self.interval_scale = interval_scale
# adaptive spatial cost aggregation (adaptive evaluation)
self.Eval_conv = nn.Conv2d(
in_channels=in_chs,
out_channels=2 * neighbors,
kernel_size=3,
stride=1,
padding=dilation,
dilation=dilation,
bias=True,
)
nn.init.constant_(self.Eval_conv.weight, 0.0)
nn.init.constant_(self.Eval_conv.bias, 0.0)
self.Feature_weight_conv = nn.Sequential(
ConvBnReLU3D(in_channels=ngroups, out_channels=16, kernel_size=1, stride=1, pad=0),
ConvBnReLU3D(in_channels=16, out_channels=8, kernel_size=1, stride=1, pad=0),
nn.Conv3d(in_channels=8, out_channels=1, kernel_size=1, stride=1, padding=0)
)
self.Pixel_wise_conv = nn.Sequential(
ConvBnReLU3D(in_channels=ngroups, out_channels=16, kernel_size=1, stride=1, pad=0),
ConvBnReLU3D(in_channels=16, out_channels=8, kernel_size=1, stride=1, pad=0),
nn.Conv3d(in_channels=8, out_channels=1, kernel_size=1, stride=1, padding=0),
)
self.Similaritynet = nn.Sequential(
ConvBnReLU3D(in_channels=ngroups, out_channels=16, kernel_size=1, stride=1, pad=0),
ConvBnReLU3D(in_channels=16, out_channels=8, kernel_size=1, stride=1, pad=0),
nn.Conv3d(in_channels=8, out_channels=1, kernel_size=1, stride=1, padding=0),
)
self.sigmoid = nn.Sigmoid()
self.softmax = nn.Softmax(dim=1)
self.eval_grid = None # Save variables as attributes for reuse in same iter
self.feature_weight = None
def forward(self,
iter,
features: List[torch.Tensor],
ref_proj,
src_projs,
view_weights,
depth_hypos: torch.Tensor,
depth_range,
):
ref_feature, src_features = features[0], features[1:] # (B,C,H,W),(nviews-1)*(B,C,H,W)
B, C, H, W = ref_feature.shape
ndepths = depth_hypos.shape[1]
device = ref_feature.device
depth_min, depth_max = depth_range[:, 0].float(), depth_range[:, 1].float()
if iter == 1:
# 1. the learned additional 2D offsets for adaptive spatial cost aggregation (adaptive evaluation)
eval_offset = self.Eval_conv(ref_feature)
eval_offset = eval_offset.view(B, 2*self.neighbors, H * W) #2 * evaluate_neighbors
self.eval_grid = get_grid(self.grid_type["evaluation"], B, H, W, eval_offset, device, 0, self.neighbors, self.dilation)
# 2. feature_weight [B, evaluate_neighbors, H, W]
weight = F.grid_sample(ref_feature.detach(), self.eval_grid,
mode="bilinear", padding_mode="border", align_corners=False)
weight = weight.view(B, self.ngroups, C // self.ngroups, self.neighbors, H, W)
ref_feature = ref_feature.view(B, self.ngroups, C // self.ngroups, H, W).unsqueeze(3)
weight = (weight * ref_feature).mean(2) # [B,G,Neighbor,H,W]
self.feature_weight = self.sigmoid(self.Feature_weight_conv(weight.detach()).squeeze(1)) #[B,Neighbor,H,W]
# # 3. weights for adaptive spatial cost aggregation in adaptive evaluation
inverse_depth_min = 1.0 / depth_min
inverse_depth_max = 1.0 / depth_max
# normalization
x = 1.0 / depth_hypos
x = (x - inverse_depth_max.view(B, 1, 1, 1)) / (inverse_depth_min - inverse_depth_max).view(B, 1, 1, 1)
x1 = F.grid_sample(
x.detach(), self.eval_grid.detach(), mode="bilinear", padding_mode="border", align_corners=False
).view(B, ndepths, self.neighbors, H, W)
# [B,Ndepth,N_neighbors,H,W]
x1 = torch.abs(x1 - x.unsqueeze(2)) / self.interval_scale
del x
# sigmoid output approximate to 1 when x=4
depth_weight = torch.sigmoid(4.0 - 2.0 * x1.clamp(min=0, max=4)).detach()
del x1
weight = depth_weight * self.feature_weight.unsqueeze(1)
weight = weight / torch.sum(weight, dim=2).unsqueeze(2) # [B,Ndepth,1,H,W]
del depth_weight
# 4. warp & aggrate
# evaluation, outputs regressed depth map and pixel-wise view weights which will
# be used for subsequent iterations
ref_volume = ref_feature.view(B, self.ngroups, C // self.ngroups, 1, H, W)
view_weight_sum, view_weights_cur, similarity_sum = 1e-5, [], 0.0
for n, (src_feature, src_proj) in enumerate(zip(src_features, src_projs)):
warped_volume = differentiable_warping(src_feature, src_proj, ref_proj, depth_hypos)
warped_volume = warped_volume.view(B, self.ngroups, C // self.ngroups, ndepths, H, W)
similarity = (warped_volume * ref_volume).mean(2)
del warped_volume
if view_weights is None:
view_weight = self.Pixel_wise_conv(similarity)
view_weight = torch.max(self.sigmoid(view_weight.squeeze(1)), dim=1)[0].unsqueeze(1)
view_weights_cur.append(view_weight)
else:
# reuse the pixel-wise view weight from first iteration of Patchmatch on stage 3
view_weight = view_weights[:, n].unsqueeze(1) # [B,1,H,W]
similarity_sum += similarity * view_weight.unsqueeze(1)
view_weight_sum += view_weight.unsqueeze(1)
del similarity, view_weight
similarity = similarity_sum.div_(view_weight_sum) # [B, G, Ndepth, H, W]
del similarity_sum, view_weight_sum
if view_weights is None:
view_weights = torch.cat(view_weights_cur, dim=1) # [B,4,H,W], 4 is the number of source views
# 5. adaptive spatial cost aggregation, apply softmax to get probability
score = self.Similaritynet(similarity).squeeze(1) # [B, Ndepth, H, W]
score = F.grid_sample(score, self.eval_grid, mode="bilinear", padding_mode="border", align_corners=False) \
.view(B, ndepths, self.neighbors, H, W)
score = torch.sum(score * weight, dim=2) ## [B,D,H,W]
score = self.softmax(score)
# 6. depth regression: expectation
depth = torch.sum(depth_hypos * score, dim=1)
return depth, score, view_weights.detach()
def differentiable_warping(
src_fea: torch.Tensor, src_proj: torch.Tensor, ref_proj: torch.Tensor, depth_samples: torch.Tensor
):
"""Differentiable homography-based warping, implemented in Pytorch.
Args:
src_fea: [B, C, H, W] source features, for each source view in batch
src_proj: [B, 4, 4] source camera projection matrix, for each source view in batch
ref_proj: [B, 4, 4] reference camera projection matrix, for each ref view in batch
depth_samples: [B, Ndepth, H, W] virtual depth layers
Returns:
warped_src_fea: [B, C, Ndepth, H, W] features on depths after perspective transformation
"""
batch, channels, height, width = src_fea.shape
num_depth = depth_samples.shape[1]
with torch.no_grad():
proj = torch.matmul(src_proj, torch.inverse(ref_proj))
rot = proj[:, :3, :3] # [B,3,3]
trans = proj[:, :3, 3:4] # [B,3,1]
y, x = torch.meshgrid(
[
torch.arange(0, height, dtype=torch.float32, device=src_fea.device),
torch.arange(0, width, dtype=torch.float32, device=src_fea.device),
]
)
y, x = y.contiguous(), x.contiguous()
y, x = y.view(height * width), x.view(height * width)
xyz = torch.stack((x, y, torch.ones_like(x))) # [3, H*W]
xyz = torch.unsqueeze(xyz, 0).repeat(batch, 1, 1) # [B, 3, H*W]
rot_xyz = torch.matmul(rot, xyz) # [B, 3, H*W]
rot_depth_xyz = rot_xyz.unsqueeze(2).repeat(1, 1, num_depth, 1) * depth_samples.view(
batch, 1, num_depth, height * width
) # [B, 3, Ndepth, H*W]
proj_xyz = rot_depth_xyz + trans.view(batch, 3, 1, 1) # [B, 3, Ndepth, H*W]
# avoid negative depth
negative_depth_mask = proj_xyz[:, 2:] <= 1e-3
proj_xyz[:, 0:1][negative_depth_mask] = float(width)
proj_xyz[:, 1:2][negative_depth_mask] = float(height)
proj_xyz[:, 2:3][negative_depth_mask] = 1.0
proj_xy = proj_xyz[:, :2, :, :] / proj_xyz[:, 2:3, :, :] # [B, 2, Ndepth, H*W]
proj_x_normalized = proj_xy[:, 0, :, :] / ((width - 1) / 2) - 1 # [B, Ndepth, H*W]
proj_y_normalized = proj_xy[:, 1, :, :] / ((height - 1) / 2) - 1
proj_xy = torch.stack((proj_x_normalized, proj_y_normalized), dim=3) # [B, Ndepth, H*W, 2]
grid = proj_xy
warped_src_fea = F.grid_sample(
src_fea,
grid.view(batch, num_depth * height, width, 2),
mode="bilinear",
padding_mode="zeros",
align_corners=True,
)
return warped_src_fea.view(batch, channels, num_depth, height, width)
4. Refine
精度已经足够,没必要在1/1分辨率使用patchmatch。设计了一个深度残差网络。为了避免对某个深度比例产生偏差,将输入深度贴图预缩放到[0,1]范围内,并在细化后将其转换回。细化网络输出一个残差,该残差与上采样的深度相加,以获得细化的深度图。
4.1 refine.py
import torch
import torch.nn as nn
import torch.nn.functional as F
from patchbase import ConvBNReLU
class RefineNet(nn.Module):
def __init__(self):
super(RefineNet, self).__init__()
self.conv_img = ConvBNReLU(3, 8)
self.conv_depth = nn.Sequential(
ConvBNReLU(1, 8),
ConvBNReLU(8, 8),
nn.ConvTranspose2d(8, 8, 3, 2, 1, 1, bias=False),
nn.BatchNorm2d(8),
nn.ReLU(inplace=True),
)
self.conv_res = nn.Sequential(
ConvBNReLU(16, 8),
nn.Conv2d(8, 1, 3, 1, 1, bias=False),
)
print('{} parameters: {}'.format(self._get_name(), sum([p.data.nelement() for p in self.parameters()])))
def forward(self,
ref_img: torch.Tensor,
depth: torch.Tensor,
depth_range: torch.Tensor,
) -> torch.Tensor:
"""
@param ref_img: (B, 3, H, W)
@param depth: (B, 1, H/2, W/2)
@param depth_range: (B, 2) B*(depth_min, depth_max)
@return:depth map (B, H, W)
"""
B, _, H, W = ref_img.shape
depth = depth.unsqueeze(1).detach()
depth_min, depth_max = depth_range[:, 0].float(), depth_range[:, 1].float()
# pre-scale the depth map into [0,1]
depth = (depth - depth_min.view(B, 1, 1, 1)) / ((depth_max - depth_min).view(B, 1, 1, 1)) #* 10
ref_img = self.conv_img(ref_img)
depth_conv = self.conv_depth(depth)
res = self.conv_res(torch.cat([ref_img,depth_conv], dim=1))
depth = F.interpolate(depth, scale_factor=2, mode="bilinear", align_corners=True) + res
# convert the normalized depth back
depth = depth_min.view(B, 1, 1, 1)+\
depth * (depth_max.view(B, 1, 1, 1) - depth_min.view(B, 1, 1, 1))
return depth.squeeze(1)
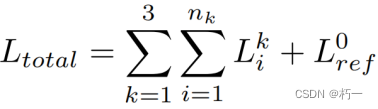
5. Loss
所有阶段,所有迭代的深度图都计算损失。
三、Experiment
1. Robust Training Strategy
通常MVS网络使用最佳的视图进行训练。然而,选定的源视图与参考视图具有很强的可见性相关性,这可能会影响像素级视图权重网络的训练。因此,从十个最佳视图中随机选择四个进行训练。该策略增加了训练时的多样性,动态地扩充了数据集,提高了泛化性能。此外,对那些具有弱可见性相关性的随机源视图进行训练,可以进一步增强可见性估计的稳健性。
2. Train args
1.图像分辨率:640x512
2.视角数:5
3.迭代次数:2、2、1
4.初始的深度平面数:48
5.之后的深度平面数:16、8、8
6.传播:在前两个stage传播
7.epoch = 8
8.lr = 0.001
9.batch size = 4
10.device:2个Nvidia GTX 1080Ti GPU
四、Other code
1.patchbase.py
from typing import List, Tuple
import torch
import torch.nn as nn
import torch.nn.functional as F
class ConvBnReLU3D(nn.Module):
def __init__(
self,
in_channels: int,
out_channels: int,
kernel_size: int = 3,
stride: int = 1,
pad: int = 1,
dilation: int = 1,
) -> None:
super(ConvBnReLU3D, self).__init__()
self.conv = nn.Conv3d(
in_channels, out_channels, kernel_size, stride=stride, padding=pad, dilation=dilation, bias=False
)
self.bn = nn.BatchNorm3d(out_channels)
def forward(self, x: torch.Tensor) -> torch.Tensor:
return F.relu(self.bn(self.conv(x)), inplace=True)
def get_grid(
grid_type: int,
batch: int,
height: int,
width: int,
offset: torch.Tensor,
device: torch.device,
propagate_neighbors: int,
evaluate_neighbors: int,
dilation: int,
) -> torch.Tensor:
"""Compute the offset for adaptive propagation or spatial cost aggregation in adaptive evaluation
Args:
grid_type: type of grid - propagation (1) or evaluation (2)
batch: batch size
height: grid height
width: grid width
offset: grid offset
device: device on which to place tensor
Returns:
generated grid: in the shape of [batch, propagate_neighbors*H, W, 2]
"""
grid_types = {"propagation": 1, "evaluation": 2}
if grid_type == grid_types["propagation"]:
if propagate_neighbors == 4: # if 4 neighbors to be sampled in propagation
original_offset = [[-dilation, 0], [0, -dilation], [0, dilation], [dilation, 0]]
elif propagate_neighbors == 8: # if 8 neighbors to be sampled in propagation
original_offset = [
[-dilation, -dilation],
[-dilation, 0],
[-dilation, dilation],
[0, -dilation],
[0, dilation],
[dilation, -dilation],
[dilation, 0],
[dilation, dilation],
]
elif propagate_neighbors == 16: # if 16 neighbors to be sampled in propagation
original_offset = [
[-dilation, -dilation],
[-dilation, 0],
[-dilation, dilation],
[0, -dilation],
[0, dilation],
[dilation, -dilation],
[dilation, 0],
[dilation, dilation],
]
for i in range(len(original_offset)):
offset_x, offset_y = original_offset[i]
original_offset.append([2 * offset_x, 2 * offset_y])
else:
raise NotImplementedError
elif grid_type == grid_types["evaluation"]:
dilation = dilation - 1 # dilation of evaluation is a little smaller than propagation
if evaluate_neighbors == 9: # if 9 neighbors to be sampled in evaluation
original_offset = [
[-dilation, -dilation],
[-dilation, 0],
[-dilation, dilation],
[0, -dilation],
[0, 0],
[0, dilation],
[dilation, -dilation],
[dilation, 0],
[dilation, dilation],
]
elif evaluate_neighbors == 17: # if 17 neighbors to be sampled in evaluation
original_offset = [
[-dilation, -dilation],
[-dilation, 0],
[-dilation, dilation],
[0, -dilation],
[0, 0],
[0, dilation],
[dilation, -dilation],
[dilation, 0],
[dilation, dilation],
]
for i in range(len(original_offset)):
offset_x, offset_y = original_offset[i]
if offset_x != 0 or offset_y != 0:
original_offset.append([2 * offset_x, 2 * offset_y])
else:
raise NotImplementedError
else:
raise NotImplementedError
with torch.no_grad():
y_grid, x_grid = torch.meshgrid(
[
torch.arange(0, height, dtype=torch.float32, device=device),
torch.arange(0, width, dtype=torch.float32, device=device),
]
)
y_grid, x_grid = y_grid.contiguous().view(height * width), x_grid.contiguous().view(height * width)
xy = torch.stack((x_grid, y_grid)) # [2, H*W]
xy = torch.unsqueeze(xy, 0).repeat(batch, 1, 1) # [B, 2, H*W]
xy_list = []
for i in range(len(original_offset)):
original_offset_y, original_offset_x = original_offset[i]
offset_x = original_offset_x + offset[:, 2 * i, :].unsqueeze(1)
offset_y = original_offset_y + offset[:, 2 * i + 1, :].unsqueeze(1)
xy_list.append((xy + torch.cat((offset_x, offset_y), dim=1)).unsqueeze(2))
xy = torch.cat(xy_list, dim=2) # [B, 2, 9, H*W]
del xy_list
del x_grid
del y_grid
x_normalized = xy[:, 0, :, :] / ((width - 1) / 2) - 1
y_normalized = xy[:, 1, :, :] / ((height - 1) / 2) - 1
del xy
grid = torch.stack((x_normalized, y_normalized), dim=3) # [B, 9, H*W, 2]
del x_normalized
del y_normalized
return grid.view(batch, len(original_offset) * height, width, 2)
class ConvBNReLU(nn.Module):
def __init__(self,
inchs: int,
outchs: int,
kernel_size: int = 3,
stride: int = 1,
padding: int = 1,
groups: int = 1,
bias: bool = False,
) -> None:
super(ConvBNReLU, self).__init__()
self.conv = nn.Conv2d(inchs, outchs, kernel_size, stride, (kernel_size-1)//2, groups=groups, bias=bias)
self.bn = nn.BatchNorm2d(outchs)
self.relu = nn.ReLU(inplace=True)
def forward(self,
x: torch.Tensor,
) -> torch.Tensor:
return self.relu(self.bn(self.conv(x)))
2. config.py(设置参数,创建网络)
"""
net args
"""
import torch.nn as nn
import net, patchmatch
import scale, backbone, regress, refine
stages = 4
# scale matrix method
scale = scale.scale_cam
# Feature map extraction network
out_chs = [8, 16, 32, 64]
Backbone= backbone.FPN_4Scales(out_chs)
# patchmatch init
stage_iters = [2, 2, 1]
in_chs = list(reversed(out_chs[1:]))
vec_dim = 2
ngroups = [8, 8, 4]
ndepths = [16, 8, 8]
propagate = [True, True, False]
propagation_out_range = [2, 4, 6]
propagate_neighbors = [16, 8, 0]
evaluate_neighbors = [9, 9, 9]
interval_scale = [0.025, 0.0125, 0.005]
Patchmatchs = nn.ModuleList([
patchmatch.PatchMatch(
stage_iters[s],
in_chs[s],
ngroups[s],
ndepths[s],
propagate[s],
propagate_neighbors[s],
propagation_out_range[s],
evaluate_neighbors[s],
interval_scale[s],
)
for s in range(stages-1)
])
# refine net
Refinenet = refine.Refinement()
# confidence regress
Calconfidence = regress.confidence_regress
# # model
model = net.CoreNet(stages, Backbone, scale, Patchmatchs, Refinenet, Calconfidence)
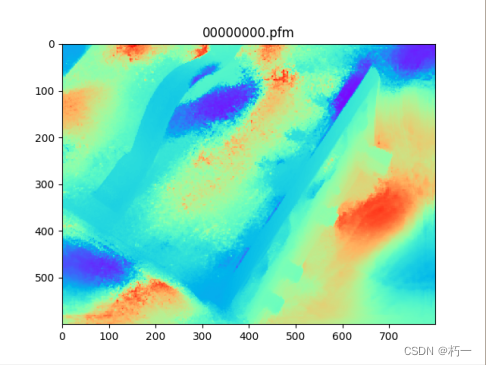
五、Test
训练一个epoch的结果:
深度图:
概率图:
参考文献:
[1] Wang F, Galliani S, Vogel C, et al. Patchmatchnet: Learned multi-view patchmatch stereo[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2021: 14194-14203.















 1322
1322











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









