









引言
亲爱的读者们,您是否在寻找某个特定的数据集,用于研究或项目实践?欢迎您在评论区留言,或者通过公众号私信告诉我,您想要的数据集的类型主题。小编会竭尽全力为您寻找,并在找到后第一时间与您分享。
FAT数据集:推进机器人领域的物体检测与3D姿态估计
一、背景
随着机器人技术的飞速发展,物体检测和3D姿态估计成为了机器人视觉领域的重要研究方向。这两个任务对于机器人来说至关重要,因为它们不仅能够帮助机器人理解周围环境,还能使机器人实现更高级别的交互和自主导航。近年来,虽然物体检测和3D姿态估计取得了显著的进步,但在复杂和动态的环境中,这些技术的性能仍然面临挑战。
为了推进这一领域的研究,研究人员开发了多种数据集,用于训练和评估相关算法。其中,Falling Things (FAT) 数据集是一个专注于物体检测和3D姿态估计任务的重要数据集。本文将详细介绍FAT数据集的构成、特点以及其在机器人领域的应用前景。
二、FAT数据集概述
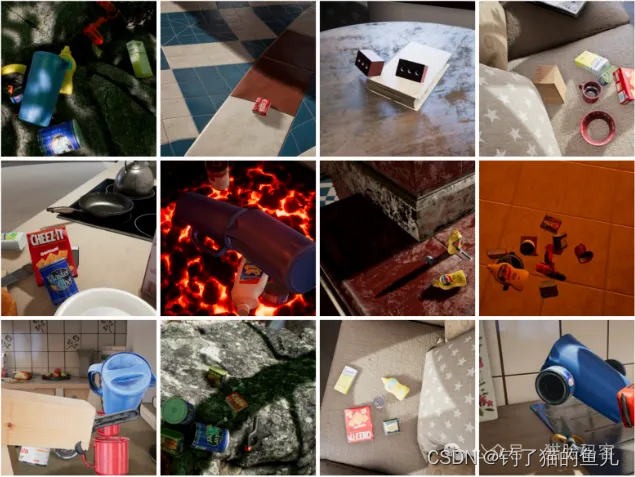
Falling Things (FAT) 数据集是一个专为机器人领域的物体检测和3D姿态估计任务设计的数据集。它包含了60k张带有标注的图像,这些图像中的物体均来自YCB物体集,这是一个广泛使用的家庭日常用品数据集。FAT数据集的独特之处在于,它提供了每个物体的准确3D姿态标注,以及每像素的类别分割和2D/3D边界框坐标。这些丰富的标注信息使得FAT数据集成为了训练和评估物体检测和3D姿态估计算法的理想选择。
三、FAT数据集的构成
图像数据
FAT数据集包含了60k张带有标注的图像,这些图像均是通过计算机生成的,具有高度的真实感和细节。图像中的物体涵盖了多种类型,包括杯子、瓶子、书籍、工具等,它们以不同的姿态和角度出现在各种复杂的场景中。
标注信息
对于每张图像,FAT数据集都提供了详细的标注信息。首先,每个物体都被标注了其准确的3D姿态,包括旋转和平移矩阵。这些信息对于训练3D姿态估计算法至关重要。其次,数据集还提供了每个物体的每像素类别分割标注,这使得算法能够更准确地识别出图像中的物体并理解它们的形状和轮廓。最后,数据集还提供了每个物体的2D和3D边界框坐标,这些信息对于训练和评估物体检测算法非常有用。
四、FAT数据集的特点
丰富的标注信息
FAT数据集提供了丰富的标注信息,包括每个物体的准确3D姿态、每像素类别分割以及2D/3D边界框坐标。这些标注信息使得算法能够更准确地理解和处理图像中的物体,从而提高物体检测和3D姿态估计的性能。
真实的图像数据
FAT数据集中的图像是通过计算机生成的,但它们具有高度的真实感和细节。这使得算法在训练过程中能够接触到更接近于实际环境的图像数据,从而提高算法在实际应用中的性能。
广泛的物体类别和场景
FAT数据集中的物体涵盖了多种类型,包括家庭日常用品、工具等。这些物体以不同的姿态和角度出现在各种复杂的场景中,使得算法能够学习到更多的物体特征和场景信息。这对于提高算法的泛化能力和鲁棒性非常有帮助。
五、应用前景
FAT数据集在机器人领域具有广泛的应用前景。首先,它可以用于训练和评估物体检测和3D姿态估计算法,这些算法是机器人实现自主导航和交互的重要基础。其次,FAT数据集还可以用于研究如何利用物体的3D姿态信息来实现更高级别的任务,如抓取、放置和操作等。此外,FAT数据集还可以与其他数据集相结合,用于研究更复杂的场景理解和交互任务。
随着机器人技术的不断发展,对于物体检测和3D姿态估计的需求也越来越高。FAT数据集作为一个高质量的数据集,将为这一领域的研究提供有力的支持。未来,我们可以期待看到更多基于FAT数据集的优秀算法和应用成果的出现。
六、总结与展望
Falling Things (FAT) 数据集是一个专为机器人领域的物体检测和3D姿态估计任务设计的高质量数据集。它提供了丰富的标注信息和真实的图像数据,使得算法能够更准确地理解和处理图像中的物体。FAT数据集在机器人领域具有广泛的应用前景,可以用于训练和评估算法、研究更高级别的任务以及与其他数据集相结合进行更复杂的场景理解和交互任务。
未来,我们可以期待看到更多基于FAT数据集的优秀算法和应用成果的出现。同时,随着机器人技术的不断发展,我们也需要不断探索新的方法和技术来提高物体检测和3D姿态估计的性能和鲁棒性。相信在不久的将来,机器人将能够更加智能地理解和处理周围环境中的物体,实现更高级别的交互和自主导航。
七、数据集地址
地址
关注公众号,回复“第127期”


















 518
518











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











