






因为假期在家没带车子回家,又想调试PID,就用python写了一个PID的算法,用matplotlib作图展现一下结果并进行调试。
代码是参考的GitHub上的大佬写的,自己做了一些注释。
import time
class PID:
def __init__(self,P=0.2,I=0.0,D=0.0):
self.Kp = P
self.Ki = I
self.Kd = D
self.sample_time = 0.00 #设置采样时间
self.current_time = time.time()
self.last_time = self.current_time #上个时间的值给下个时间
self.clear()
def clear(self): #定义初始化函数
self.setpoint = 0.0 #给定目标值
self.PTerm = 0.0
self.ITerm = 0.0
self.DTerm = 0.0 #用PTerm,ITerm,DTerm来表示三个控制的数值
self.last_error = 0.0
self.int_error = 0.0
self.windup_guard = 20.0 #设置范围
self.output = 0.0
def update(self,value):
error = self.setpoint - value #初次差值
self.current_time = time.time()
delta_time = self.current_time - self.last_time #时间差
delta_error = error - self.last_error #差值
if (delta_time >= self.sample_time):
self.PTerm = self.Kp *error #比例线性控制
self.ITerm += error * delta_time #积分
if (self.ITerm < -self.windup_guard): #积分的控制量在一定范围内
self.ITerm = -self.windup_guard
elif (self.ITerm > self.windup_guard):
self.ITerm = self.windup_guard
self.DTerm = 0
if delta_time > 0:
self.DTerm = delta_error / delta_time
self.last_time = self.current_time
self.last_error = error
self.output = self.PTerm + (self.Ki * self.ITerm) +(self.Kd * self.DTerm)
def setKp(self, proportional_gain):
self.Kp = proportional_gain
def setKi(self, integral_gain):
self.Ki = integral_gain
def setKd(self, derivative_gain):
self.Kd = derivative_gain
def setWindup(self, windup):
self.windup_guard = windup
def setSampleTime(self, sample_time):
self.sample_time = sample_time
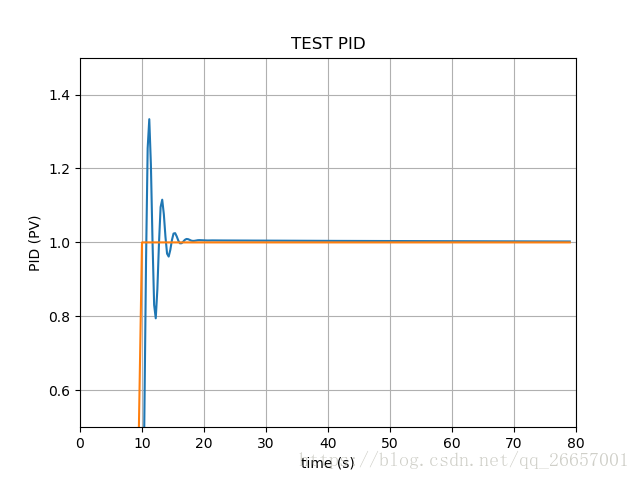
因为自己用python写的话不像是在单片机上,单片机编程有一个重要的函数中断函数。Python里面没有内置这个函数,所以我们用time库来控制函数的运行时间的间隔。上述代码就是一个完整的pid的算法,但是也有不足的地方,当然这只是一个演示,并没有做仔细的更改,毕竟在单片机上进行用不是在python上。下面附上图像展示。















 1749
1749











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









