






1.先安装archiconda3,它相当于anaconda虚拟环境。可以参考这位大哥的虚拟环境安装步骤。
【玩转Jetson TX2 NX】(十)TX2 NX 安装Archiconda3+创建pytorch环境(详细教程+错误解决)-CSDN博客文章浏览阅读3k次,点赞2次,收藏40次。TX2 NX 安装Archiconda3+创建pytorch环境(详细教程+错误解决)_archiconda3https://blog.csdn.net/qq_42078934/article/details/129913289安装好虚拟环境后,创建虚拟环境 conda create -n pytorch python=3.6
进入虚拟环境 conda activate pytorch
查看环境命令 conda list
2.安装torch,torchvision环境
也可以参考上面老哥的贴子下载torch、torchvison的包。
安装torch命令 pip install torch(自动补全成自己下载的包)
安装torchvision命令 cd torchvision(自己下载名称)
export BUILD_VERSION=0.9.0
python3 setup.py install --user
可能出现错误Illegal instruction (core duCSDNmped)。去执行这个方法。CSDN![]() https://mp.csdn.net/mp_blog/creation/editor/133887513
https://mp.csdn.net/mp_blog/creation/editor/133887513
在执行后又出现SyntaxError: future feature annotations is not defined,执行一下以下命令。
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev libomp-dev
pip3 install Cython
pip3 install pillow
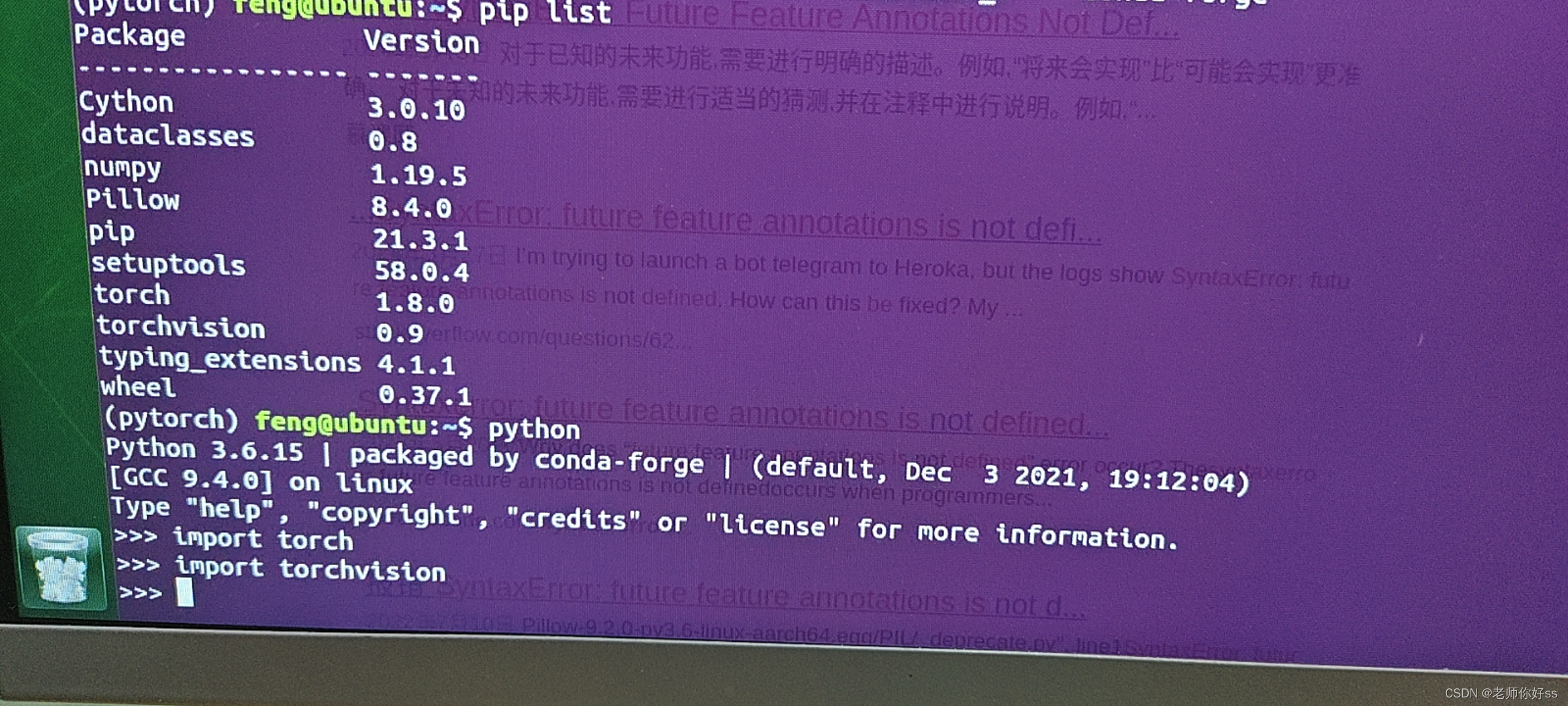
验证是否安装成功。可以看下我的。也可以去看别的方法。
3.下载yolov5第五个版本。注释掉torch,torchvision,

运行环境命令。 在yolov5的目录下执行 pip3 install -r requirements.txt
安装过程很慢。很正常,可能需要2个小时之久,完成后可以尝试运行yolov5,但是我这里增加了一下板子的交换空间,能够使用图片检测,使用相机时,猜测是我的相机像素太高了,所以我想换个小像素的试试效果,后续说效果。
4.安装TensorRT环境。下面是官方教程。
可能遇到在转自己的.wts文件生成.engine文件时出错,可以尝试一下 赋予.wts文件权限
chmod 777 xxx.wts
运行中遇见的问题。
















 680
680











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











