







论文基本信息
《EMPC: Energy-Minimization Path Construction for data collection and wireless charging in WRSN》
《EMPC:在WRSN中进行数据收集和无线充电的能量最小化路径构建》
Pervasive and Mobile Computing 73 (2021) 101401
求解方法比较拉
摘要
传感数据采集和能量补充是无线可充电传感器网络(WRSN)研究的关键问题。利用移动车辆收集数据,补充能源,不仅可以有效地降低节点通信能耗,同时也保证了网络运行的连续性。提出了一种基于双功能车辆能量最小化的数据采集和无线充电算法,以最小化网络能耗。该算法包括自适应网络划分、锚点选择和双功能车辆路径构建三个阶段。提出了一种基于最小生成树的划分算法,将网络在自适应网络划分阶段划分为多个区域。采用锚点选择阶段来获取每个区域的数据采集点。路径构建阶段设计构建具有锚点和充电节点的车辆移动路径。最后,实验表明,该算法不仅能有效降低网络能耗,而且能延长网络寿命,增加采集数据量。
1.引言
无线可充电传感器网络(WRSNs)由大量的传感器节点组成,可用于环境监测、信息传输、交通控制和家庭自动化[1]。高效的数据收集由许多因素决定,如电池能量、路由调度、传感器节点分布和链路约束,这使得传感数据收集成为WRSN中的关键问题之一。只有使用多跳静态路由方法来收集数据,才会增加能耗,严重减少收集的数据量和网络寿命。该方法使能量问题成为限制传感器节点广泛应用的一个重要约束和挑战。
最近的研究提出利用移动车辆进行数据收集和无线充电。对于数据采集,最近的工作通常使用单功能数据采集车(DCVs)和多跳传输[2–5]的组合来传输传感数据[6–9]。选择一些传感器节点作为锚点,在其覆盖范围内收集传感数据。DCV移动到每个锚,以收集锚的缓冲池中的数据。这不仅减少了相邻节点数据传输造成的数据采集延迟和冗余通信能耗,而且延长了网络的使用寿命。其他研究使用带有无线能量传输的单功能无线充电车(WCVs)来解决WRSN中的能量限制。它可以提供一个更可控、更密集、更可持续的能源供应[10–12]。因此,该网络分别采用单功能车辆DCV和WCV来收集数据和提供能量。
在基于移动车辆的数据采集和能量补充算法中,网络能耗是影响网络寿命和采集数据量等网络性能的关键因素。与单位数据收集和能源补充能耗相比,单位汽车的移动能耗更大。因此,减少车辆的移动距离是降低网络能耗的一个重要途径。当WCV和DCV移动到同一个传感器节点时,会导致移动能耗翻倍,延长节点服务等待时间,降低网络性能。因此,本文旨在利用同步数据采集和无线充电车(DC-wcv)的双功能来完成数据采集和能量补充[13–15]。为了减少数据采集延迟和通信能耗,我们选择了一些传感器节点作为锚点,在其覆盖范围内采集数据。DC-WCV依次移动到每个锚点,收集数据和提供能量,使网络的寿命尽可能长。为了避免能量耗尽导致的传感器节点死亡,DC-WCV可以选择性地将一些充电节点插入其移动路径中。因此,本文旨在设计一种高效的数据采集和无线充电算法,以降低网络能耗,有效地增加所收集的数据量。
考虑到能量、缓冲池和延迟的约束条件,本文提出了一个针对能耗器件、传感器节点和DC-WCV的DC-WCV移动路径规划问题,以最小化网络能耗。为了解决这一问题,提出了一种能量最小化路径构造(EMPC)算法来优化网络性能。以下列举了本文的贡献。
- 将网络划分为多个组。为了保证大规模WRSN中的数据延迟要求,避免锚点的过载,本文根据传感器的距离和一个区域内的最小生成树长度将传感器划分为多个区域。
- 选择用于数据收集的锚点。提出了一种基于节点权重的锚选择算法,构建一组合适的锚,以确定节点必须在DC-WCV轮中访问节点。
- 构建了DC-WCV的有效路径。本文在满足传感器节点能量、车辆能量、缓冲池约束和数据时延要求的前提下,设计了一种高效的锚节点和充电节点DC-WCV路径,使网络能耗最大限度地降低,延长网络寿命,增加数据采集量。
本文的其余部分组织如下。在第2节中,我们将对相关的工作进行概述。第三节介绍了系统模型和问题的公式。EMPC算法详见第4节。第5节介绍了性能分析。最后,我们在第6节中总结了论文。
2.相关工作
为了在WRSN中有效地收集数据和补充能量,人们设计了基于双功能车辆的数据采集和无线充电算法来提高网络性能。本节总结了与本文提出的方案相关的三个方面的工作,即网络划分[16–18]、锚点选择[15,19-23]和移动路径建设[13,24-29]。
3.系统模型
3.1. Network model
我们考虑一个由N个收费静态传感器节点组成的传感器网络,它随机部署在一个边长为r的方形传感区域。让S = {s1,s2,s3,…,sN }是传感器的集合。每个传感器节点都配备有一个无线能量接收模块和电池。如果两个传感器节点i和j在相互感知的范围内,则节点i和j之间存在一个直接通信的物理链接。传感器正在监测周围的环境,以获取数据,并通过多跳传输将传感数据传输到锚点。然后DC-WCV移动到锚点收集数据并提供能量,或移动到充电节点提供能量。所有直流-wcv都配备有无线能量接收器和传感数据接收器。
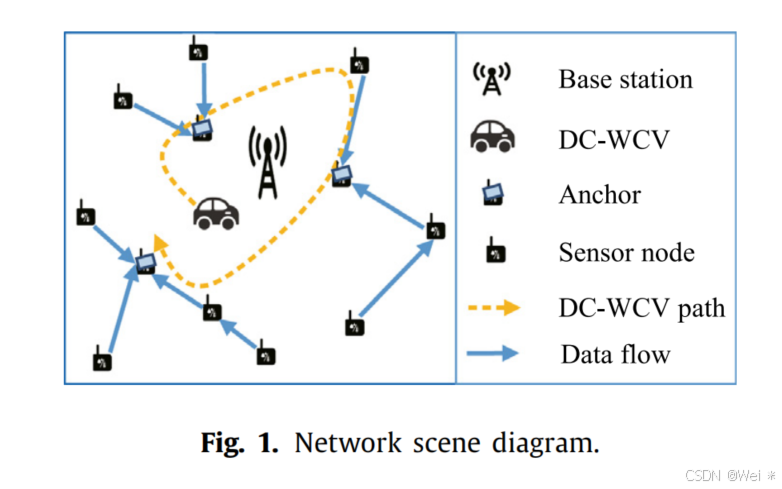
网络场景图如图1所示。整个网络由两种类型的设备组成:作为数据收集器的双功能车辆DC-WCV和能量发射器,执行感知环境的传感器节点。在每一轮测试中,DC-WCV以基站为起始点和终点,依次访问每个传感器根据其服务队列。在一轮比赛结束时,网络会重新选择锚点,以避免能源热点。DC-WCV根据新的锚点重新规划了其移动路径。基站位于传感区域的中心位置,主要用于处理采集到的数据,并为DC-WCV提供能量。它可以维护网络运行,保证监控数据的有效性。
3.2. Energy model
由于传感器的能量有限,能量消耗是决定网络性能的一个重要因素。考虑到电池能量、缓冲池和数据延迟的约束条件,本文旨在设计一种高效的DCWCV移动路径,以最小化总能耗。传感器节点的能量用于传感、接收和传输数据。在[30]中应用了无线通信能耗模型。es表示感知k位数据的能量消耗。传输和接收k位数据的平均能耗。es,et和er可以表示为
 其中,d为发送节点和接收节点之间的欧氏距离。K表示传输的数据量,单位为位。ε表示放大器电路的单位位能量输出。Es、Et和Er分别表示传感、发射和接收电路的单位比特能量输出,均为固定参数,即Es = Et = Er = 558 Nj/bit,ε = 33.66 Pj/bit/m2 [27]。
其中,d为发送节点和接收节点之间的欧氏距离。K表示传输的数据量,单位为位。ε表示放大器电路的单位位能量输出。Es、Et和Er分别表示传感、发射和接收电路的单位比特能量输出,均为固定参数,即Es = Et = Er = 558 Nj/bit,ε = 33.66 Pj/bit/m2 [27]。
3.3. Problem formulation
本文旨在设计一种高效的DC-WCV移动路径,在电池能量、缓冲池和数据延迟的约束下,最小化总能耗。在WRSN中,耗能设备包括DC-WCV和传感器。DCWCV的能量主要用于移动设备、接收传感数据、为节点提供能量。传感器电池的能量主要用于数据的传感、传输和接收。
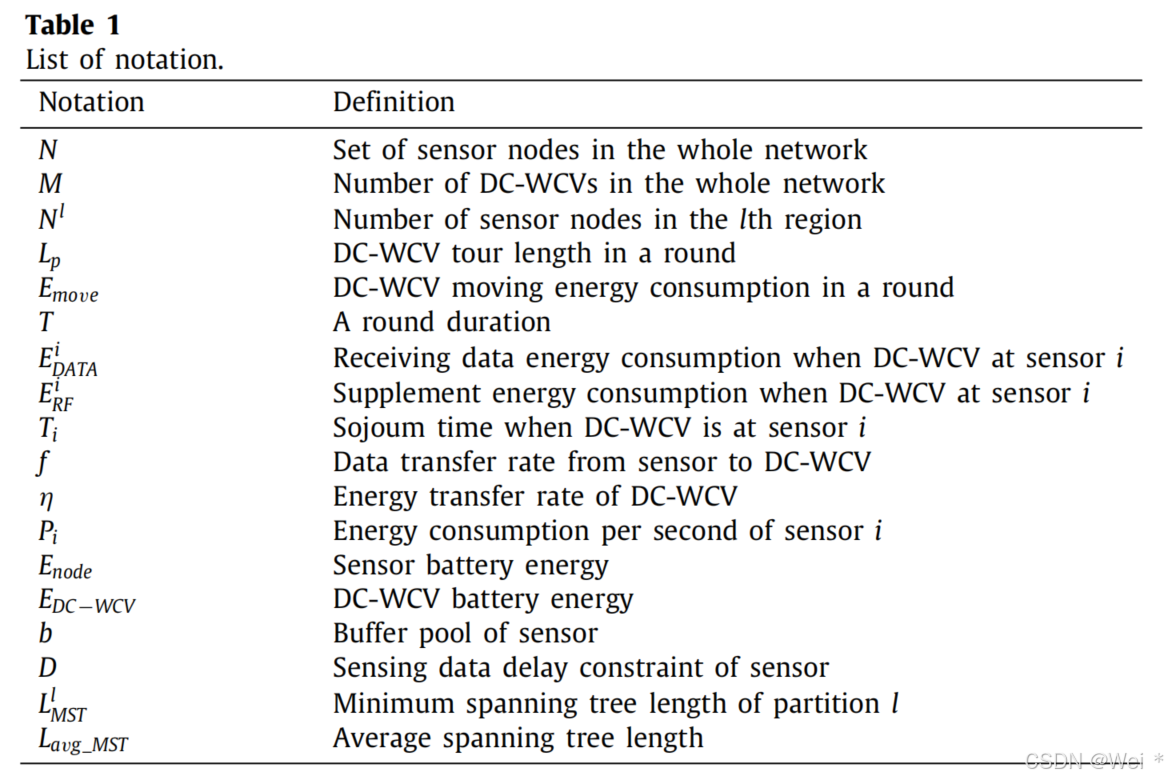
在大规模的WRSN中,DC-WCV可能无法及时对充电节点或锚定进行充电,这可能会导致节点死亡。此外,多个dc-wcv可能在同一区域分组,影响整体性能。为了提高网络性能,本文根据dc-wcv的数量将网络划分为M个区域。dc-wcv部署在每个区域,以收集数据和充电节点。为了最小化通信能耗和DC-WCV移动路径长度,我们选择了一些静态传感器节点作为锚点,在其集群中收集数据。为了确保感知数据的有效性,每一轮的锚点都需要包含在DC-WCV服务队列中。当传感器节点发送充电请求时,DC-WCV需要移动到提供能量的充电节点,以确保该节点存活并延长网络寿命。相关的符号定义如表1所示。
3.3.1. Dual-function vehicle DC-WCV 双功能车辆DC-WCV
假设l-th区传感器节点数量为 N l N^l Nl,其中1≤l≤M为整个网络中的dc-wcv数量。设|A|表示第l-th个区域中锚点的数量。A表示第l个区域中的锚点队列集,其中A = {A1,A2,A3,……, A ∣ A ∣ A_{|A|} A∣A∣}。让|A|≤|n|≤ N l N^l Nl,|n|表示在一轮中需要由DC-WCV提供服务的节点数。当|A| = |n|时,此一轮中的DC-WCV服务队列只包含锚点。当|A| < |n|时,这一轮的DC-WCV服务队列同时包含锚点和充电节点,其中n = {n1,n2,n3,…, n ∣ n ∣ n_{|n|} n∣n∣}。DC-WCV用于接收传感数据并补充节点能量,节点能量消耗包括移动能量消耗、锚点接收传感数据能耗、补充传感器节点能量消耗。
(a) Mobile energy consumption.
移动能源消耗。L表示DC-WCV循环路径通过集合n = {n1,n2,n3,…,n|n|}。Lmin表示通过集合n的最短哈密顿循环。Lmax表示最大长度通过集合n的有效路径,其中Lmax =√2(|n|−2)ab + 2(a + b)[31,32]。a和b表示矩形区域覆盖矩形区域的长度和宽度。Lp表示循环路径L.di的构造路径长度,i+1表示集合L中的边的长度(ni,ni+1)。DC-WCV移动路径长度约束可以表示为
DC-WCV的一轮移动能耗为
其中,emove表示DC-WCV的单位移动能耗。
(b) Receiving sensing data energy consumption at the anchor
我们假设所有可充电传感器节点的数据传感率都服从泊松分布,其均值为λ [32]。一个节点的最大数据感知是Fλ−1(ε)。由于Fλ−1(1)→∞,ε基于[32]接近但不等于1. ε = 0.99。通过DC-WCV从节点i收集到的最大数据量和所需的能量分别表示为
其中|Ai |表示由传感器节点i根的树中包含的节点数。Er表示接收电路中的能量输出,这是一个固定的参数。
© Supplementing energy consumption for sensor nodes.
DC-WCV可以在访问传感器时为传感器节点提供射频能量。根据访问节点的类型,DC-WCV的服务传感器可以分为锚点的射频能量和充电节点的射频能量。
锚点的射频能量。在锚点接收传感数据的时间通常比其补充能量时间长。为了保证感知数据的有效性,在每个锚点上的停留时间等于接收感知数据所花费的时间。根据在传感器i处采集的数据量,在传感器i处的停留时间为

? 接受数据的时间比补充能量的时间长?
其中,f为从传感器到DC-WCV的数据传输速率。当DC-WCV停留在传感器节点i时,DC-WCV对传感器i的射频能量补充为
其中,eRF是从DC-WCV到传感器的能量转移速率,哪个单位为J/s。η是DC-WCV的能量传递效率。
基于以上能耗分析,可以将最小化网络能耗问题转化为以下非线性优化问题。
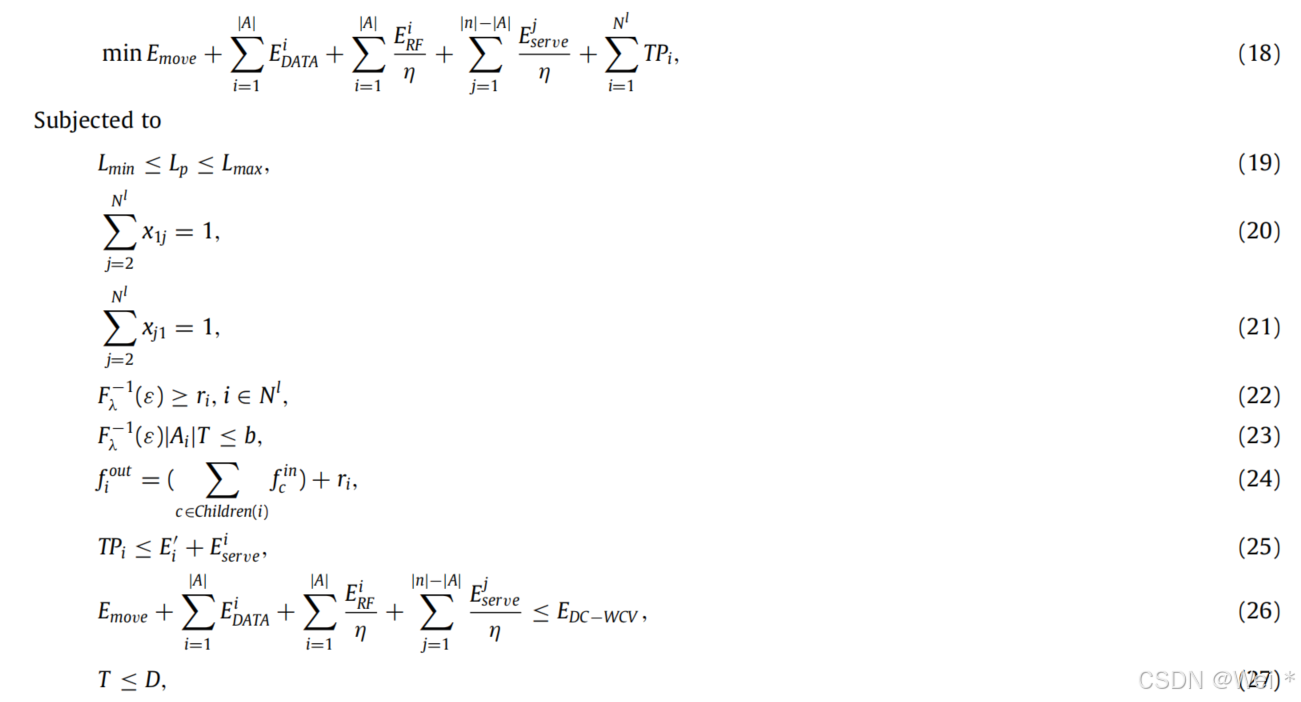
其中,∀i,c∈Nl。b表示节点缓冲区的大小。f i out表示传感器i的输出数据流。i中的fi表示传感器i的输入数据流。D表示感知数据延迟约束。Ei‘是传感器i的剩余能量。
优化目标函数,如(18)所示,表示双功能车辆和传感器的一轮总能耗。平衡(18)表示DC-WCV为移动、接收锚点数据、分别提供能量和传感器所消耗的能量。考虑到电池能量约束、缓冲池约束和感知数据延迟约束,本文旨在规划和设计一种有效的DC-WCV移动路径,以最小化总能耗。
这些约束条件可以解释如下。平衡(19)表示DC-WCV移动路径是一个可行的连通回路。平衡(20)确保DC-WCV分一轮从基站开始。平衡(21)确保DC-WCV最终在一轮返回的过程中返回到基站。这里,1表示网络基站。平衡(22)表明服从泊松分布的数据感知速率总是小于最大的数据感知速率。Fλ−1(ε)表示最大的数据传感速率。平衡(23)表示传感器缓冲区中的数据量小于传感器缓冲池大小,避免最坏情况下出现溢出现象。T表示一个轮次的持续时间。平衡(24)表示传感器节点的数据流约束条件。输出流等于其子节点的输入数据及其自己的感知数据流。约束条件下的方程式。(25)-(26)是传感器和DC-WCV的电池能量约束。Eq.(25)表示传感器的总能量消耗小于传感器自身的能量和补充能量之和。平衡(26)保证移动、接收数据、补的DC-WCV能耗不超过总能量,保证车辆始终返回基站补充能量。平衡(27)表示数据延迟约束,表示一轮持续时间小于数据延迟,以确保数据的有效性。
4.优化算法
通过设计满足(19)-(27)的DC-WCV移动路径,提出了一种能量最小化路径构造(EMPC)算法来求解目标函数(18)。首先,EMPC算法将一个WRSN划分为几个区域,并在每个区域部署一个DC-WCV进行数据收集和能源供应。然后,选择一些传感器作为锚点来收集数据。接下来,EMPC算法优化了传感器的高效DC-WCV移动路径,以最小化网络能耗。最后,DC-WCV根据其移动路径为传感器补充能量和/或收集数据。详细介绍了EMPC算法如下。
图2为EMPC的生成过程。矩形区域表示传感区域。中间的红色五角大楼是基站。蓝色虚线将图2(a).中的感知区域分为四个区域在每个区域的基站上都有一个最小化的生成树生根。在图2(b)中,选择一些传感器作为锚点,收集其区域内的数据,用固体金刚石表示。从传感器到锚点的数据传输路由由黑色实线表示。在图2©中,dc-wcv的行程路径由灰色虚线构成。它们由锚点和充电节点组成。一方面,dc-wcv移动到充电节点并为其提供能量。另一方面,dc-wcv移动到锚点上,以收集其数据并为其提供能量。
4.1. Adaptive network partition 自适应网络分区
提出了一种基于最小生成树(NP-MST)的自适应网络划分算法,该算法首先选择M个中心点作为初始网络划分的基础。为了保证所选的M个中心点分散而不集中,根据传感区域形状和基站方向将整个网络划分为M个区域。每个区域都被一个矩形所覆盖。然后,根据每个区域内其他传感器节点的线性距离的最小之和来选择中心点。在第l个区域,传感器i到其他节点的距离之和表示为
M是因为有M个车,每个车一个区域

然后,选择每个区域中Si最小的传感器作为初始中心点。此外,从传感器到中心点的最短路由跳点是网络分区的准则。计算从传感器i到M中心点的最短路由跳集,H = {h 1 i,h 2 i,…,h M i }和∀i∈N。最小的h l i意味着传感器i将被分配到第1个区域,其中1≤l≤M。重复这个过程,直到所有传感器被分配。然后根据新区域中的(28)重新计算中心点。根据从传感器到中心点的最短路由跳点,对整个网络进行重新划分。重复网络分区过程,直到中心点的结果不改变为止。
在划分网络后,不同区域之间的传感器数量可能会有很大的差异。最小生成树用于调整每个区域的节点。调整过程分为两步,自适应网络划分算法如算法1所示。
树长计算。在每个分区中构建基于基站(即根节点)的最小生成树。计算最小生成树长度L l MST,其中1≤l≤M。平均生成树长度Lavg_MST =∑li=1LlMST/M是基于L l MST计算的。
节点调整。依次比较L l MST与Lavg_MST之间差值的绝对值。如果所有的绝对值都不大于D_value的常数,则该分区将结束。否则,生成树长度较大的节点将被划分为生成树长度较小的相邻分区。划分的原则如下。一个线段有两个端点。一个是基站。另一个是分区1中的任何节点。保持基础站的终点固定,并旋转线段。将线段在分区2中首先相遇的节点划分为分区1。遍历所有区域后,重新计算L l MST和Lavg_MST。重复,直到每个分区L l MST与Lavg_MST差的绝对值不大于D_value。图3为NP-MST的网络划分结果。100个可充电传感器节点随机分布在100 m×100 m的平方区域内。每个节点的传感范围为=博士15m。位于传感区域中心的红色五边形代表基站。传感器节点在网络划分后用四个图标(十字字符、空心圆、星号、十字字符)表示。图3(a)为均衡网络的结果。图3(b)显示了基于最短路由跳数的划分网络的结果。图3.©为基于最小生成树进行网络划分的结果。图3(b)和©中传感器的数量和分布与图3(a).中的不同单个区域内的节点数存在显著差异。由于DC-WCV的硬件配置相同,不平衡的网络分区可能导致在传感器节点较少的区域的DC-WCV长时间空闲。但是,DC-WCV总是在节点更多的区域内很繁忙。根据最小生成树对网络进行调整后,图3©中各区域的传感器节点数更加均匀。绿色虚线表示节点与上图相比划分的变化区域。图4为调整前后的最小生成树比较图。图4(a)为调整前各分区的最小生成树。图4(b)为调整后各分区的最小生成树。
4.2. Anchor selection
选择一些传感器作为具有高电池能量和良好社交性的锚点,在覆盖范围内收集传感数据。因此,提出了一种基于传感器节点密度和能量的锚点选择算法(AS-DE)来选择一些节点作为锚点。
矩阵X表示任意两个节点i和j是否在k个跳数内连接。矩阵X作为

传感器密度是指k跳内的节点总数与分区中的节点总数之比。传感器i的密度可以表示为

其中Nx_hop (i)表示传感器i的x跳中的邻域节点集,其中|∑kx=1 Nx_hop (i)| =∑Xi。传感器节点i的权重考虑电池能量和社交性为

其中,E0为k跳邻域集中节点i的最小电池能量。Ei表示节点i的剩余能量。α表示重要性,其中0≤α≤1。
传感器根据传感器的权重在一个分区中从高到低进行分类。选择权值最大的节点作为锚点,并将其添加到锚点集a中,然后去掉锚点k跳邻域内的节点。重新选择权值最大的节点。重复此过程,直到分区中的每个节点都有一个唯一的锚点并且满足约束(19)。如果锚和基站的TSP路径小于路径阈值Lb,则选择权重最大的非锚节点添加到锚集a中。重复锚添加过程,直到TSP仅小于Lb并满足约束(19)。锚点选择算法如算法2所示。
锚点的选择与变量k密切相关,它会影响数据的传输路径和传感器的能耗。因此,根据Ref将k设置为2。[32].100个可充电传感器节点随机分布在100米×100米正方形网络中。图5为基于AS-DE的锚点选择结果示例。蓝色的实心点代表锚定点。黑色虚线表示由锚点和基站构建的TSP路径。这四条TSP路径分别代表了四个区域内的锚点和基站组成的最短路径。
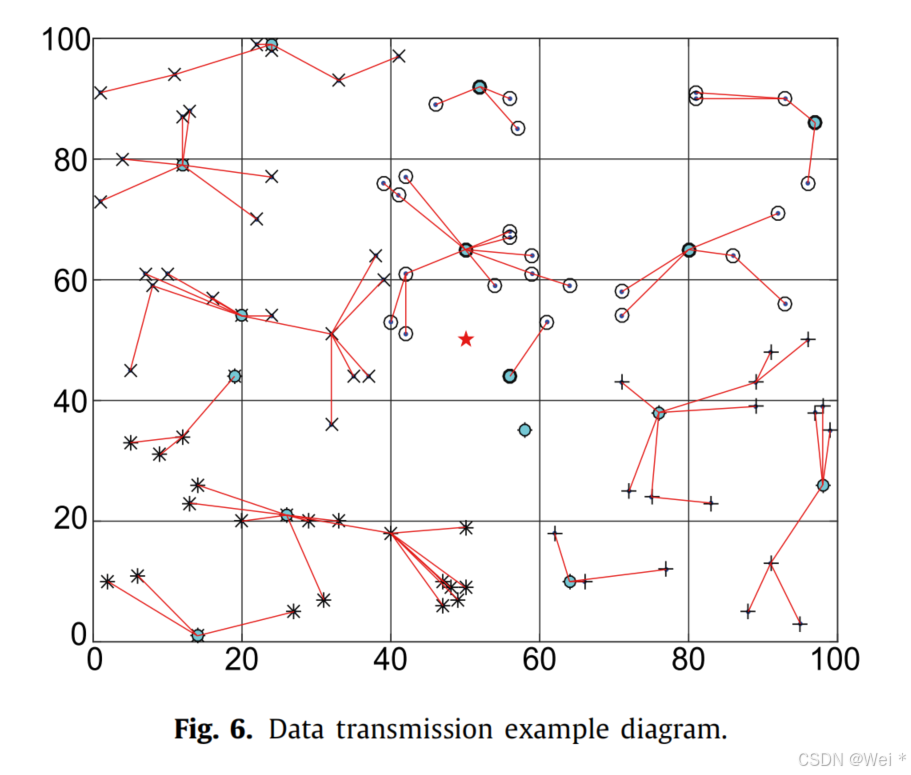
图6显示了每个分区中的数据传输示例。实心蓝点是每个分区的锚点。红色实线表示传感数据传输链路。我们可以看到,每个具有多个或零子节点的传感器都有一个唯一的父节点。数据传输链路、锚点及其成员可以视为数据传输树。锚点被视为根节点,成员被视为后代节点。
4.3. Path construction
Set L = {lm|1≤m≤Nl}表示DC-WCV服务队列。所有锚都包含在集合L中。如果DC-WCV接收到充电请求,则L中可能有充电节点。本文旨在通过构建移动车辆路径来最小化网络能耗。车辆路径施工过程分为锚定路径施工和充电节点插入两种过程。
4.3.1. Anchor path construction
先选一些锚点组成一个凸多边形,然后插入新节点,选择路径增量最少的两个点之间插入
锚定路径施工过程包括两个步骤。首先,利用一些锚点构造了一个凸多边形。其次,将剩余的锚点插入到凸多边形中。当一个多边形的任何一边无限地延伸到一条直线时,其他的边就在这一条直线的一边。这个多边形被称为凸多边形。设置L‘={l0、l1、l2、……,l|A|}表示车辆在一个区域内的停留点,其中l0为基站,|A|为锚号。该凸多边形以l0为起始点[33]和端点[33]构造。多边形顶点集为{l0、l1、l2、…,lc }。c < |A|意味着剩余的(|A|−c)锚不包括在多边形顶点集中。让我们设置L‘’={lc+1,lc+2,……,l|A|−1,l|A|}表示剩余的锚点。然后,根据三角形不等式定理(即三角形任意两边的和必须大于第三边的测度值),将剩余的锚点插入凸多边形中,构造所有锚点的最短路径。设d(lx,ly)表示lx和ly之间的距离。lcl是插入凸多边形的锚和lcl∈L‘’。Dengle(lx,ly)表示在路径中插入锚点lcl到相邻点lx和ly的移动增量。它可以表示为

当lcl依次插入两个相邻点lx和ly时,选择最小增量增量(lx和ly)。删除其余锚点集L中的锚点lcl。并重新排列路径中的节点数。重复此过程,直到设置L“”为空。车辆移动路径为路径=(l0,l1,l2,…,l|A|,l0)。凸多边形方案保证了只能构造一次行程,并且不会增加额外的距离。三角形不等式定理是对运动增量的理论支持。将运动增量最小的锚被插入到其他两个锚之间,以确保新行程的总路径总是最小的。以上两个优点保证了锚路径构造方法构建的行程最小。
4.3.2. Charging node insertion 充电节点插入
车辆可以在任何时候接收充电请求,并且在服务于当前节点后只服务于路径中的下一个节点。充电请求是指充电节点的充电请求队列。一旦车辆收到充电请求,充电节点将被插入到充电请求中。当车辆离开当前服务节点并选择路径中的下一个节点时,它将首先检查计费请求是否为空。如果图表请求为空,则车辆直接选择路径中的下一个节点。否则,根据节点的剩余时间进行排序。具有最小剩余时间的节点被标记为1。然后根据车辆与充电节点之间的距离对充电节点进行排序。距离最小的节点被标记为1。在此基础上,充电节点按剩余时间排名和距离排名之和按升序排列。此外,将ChargingReq中的第一个节点i基于(33)插入到Path中,并判断约束条件(19)-(27)是否满足。如果满足,则将节点插入路径和==−i。否则,遍历图表中的下一个节点,直到遍历一次。最后,车辆根据新的路径为下一个节点提供服务。
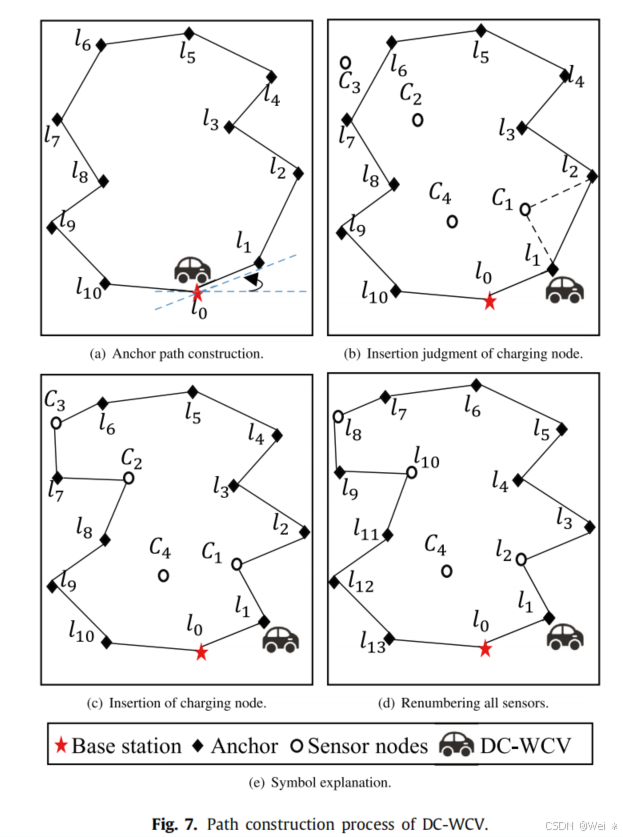
图7为DC-WCV的路径施工过程。图7(a)为由10个锚点和基站组成的DC-WCV移动路径路径=(l0、l1、l2、…、l10、l0),其中l0表示基站。图7(b)显示,当DC-WCV移动到11时,接收来自C1、C2、C3、C4的充电请求。本文假设将充电节点C1插入到DC-WCV移动路径中。通过优化函数约束来判断插入c1的可行性。从图7©可以看出,将充电节点C1、C2、C3插入Path时,满足了优化函数约束。采用TSP算法构建充电节点、锚点和基站的最短移动路径。图7(d)显示了DC-WCV路径中服务节点的重新编号。它表示为Path =(l0,l1,l2,…,l13,l0),其中l0是Path的起点。



















 1167
1167

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











