







SORT系列
SORT-1 项目配置运行-WINDOWS
SORT-2 卡尔曼滤波推导和示例
SORT-3 匈牙利算法和SORT类
SORT-4 SORT项目代码解析
本项目地址
匈牙利算法
有权二部图的最大匹配。
讲解视频:二部图和匈牙利算法
利用匈牙利算法对目标框和检测框进行关联:匈牙利进行关联
API文档:Linear_sum_assignment
底层代码详解:Linear_sum_assignment源码详解匈牙利算法在 SORT 中的使用: MOT - 数据关联
SORT类代码详解
算法流程
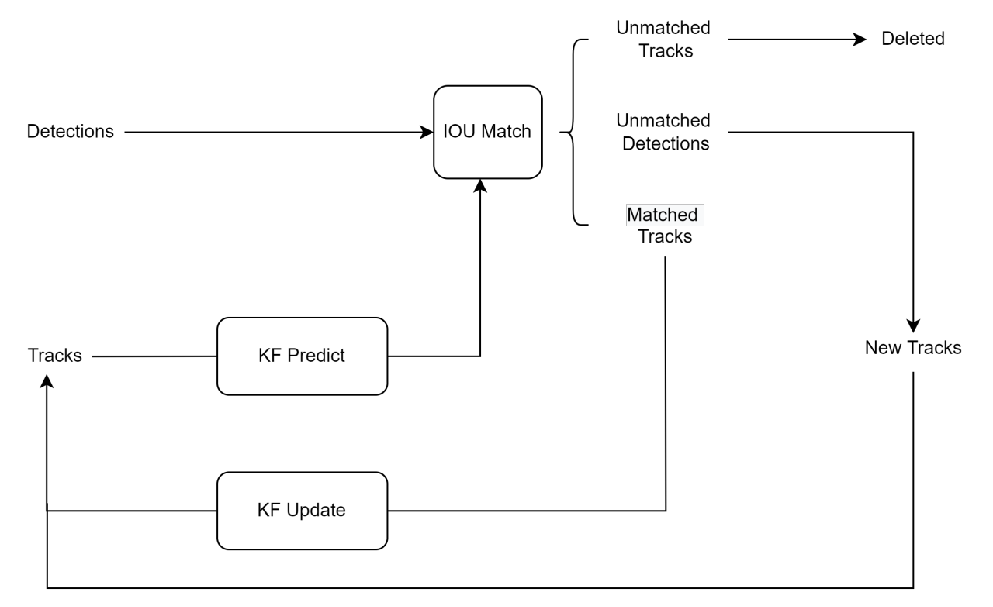
Detections是通过目标检测器得到的目标框,Tracks是轨迹信息。核心是匹配的过程与卡尔曼滤波的预测和更新过程。
SORT算法的工作流程如下:
目标检测器得到目标框Detections,同时卡尔曼滤波器预测当前的帧的Tracks, 然后将Detections和Tracks进行IOU匹配,最终得到的结果分为:
- Unmatched Tracks,这部分被认为是失配,Detection和Track无法匹配,如果失配持续了T次,该目标ID将从待跟踪目标中删除。
- Unmatched Detections, 这部分说明没有任意一个Track能匹配Detection, 所以要为这个detection分配一个新的track。
- Matched Track,这部分说明得到了匹配。
卡尔曼滤波可以根据Tracks状态预测下一帧的目标框状态。
卡尔曼滤波更新是对观测值(匹配上的Track)和估计值更新所有track的状态。
核心算法:
- 卡尔曼滤波 : 轨迹预测
- 匈牙利算法 : 匹配关联
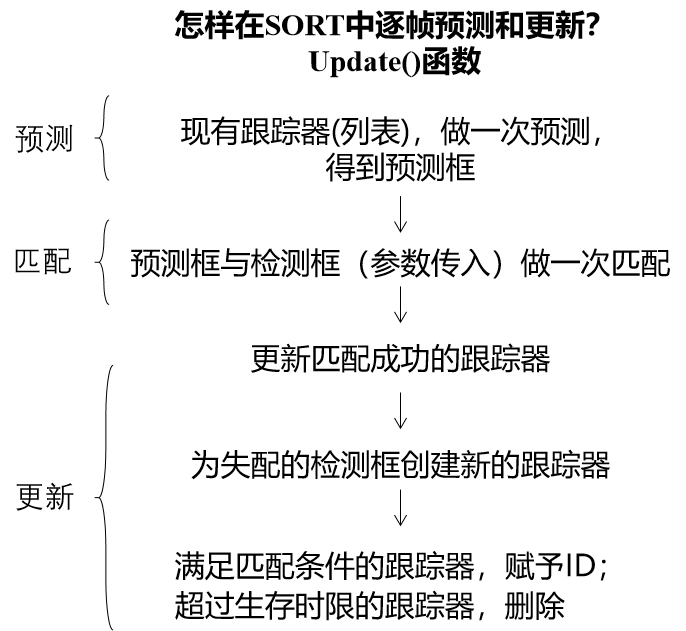
流程图
SORT 类 Update 函数的流程图:
几个细节的问题
参考:目标跟踪:yolov4目标检测 + sort目标跟踪
接下来就是逐帧怎样进行预测和更新;
1、怎样predict ?
2、怎样update ?
3、trk.hit_streak怎样实现连击 >= min_hits时,赋予该trk一个id ?
4、trk.time_since_update > max_age时,删除该轨迹trk的实现方式?
4个小问题精髓答案:
- update matched trackers with assigned detections
- 只有匹配上才会update,此时,每个track的time_since_update重新归置为0,
- 没有匹配上轨迹的detections,将会赋予新的轨迹。
- 新轨迹连续匹配上update时,hit_streak += 1,大于min_hits时才会赋予新的id;
新轨迹未如果没匹配上detection,这个track的time_since_update+=1,重新将hit_streak = 0,直到这个trk.time_since_update>max_age, 删除该轨迹
代码详细注解
def update(self, dets=np.empty((0, 5))):
"""
Params:
dets - a numpy array of detections in the format [[x1,y1,x2,y2,score],[x1,y1,x2,y2,score],...] 检测框列表
Requires: this method must be called once for each frame even with empty detections (use np.empty((0, 5)) for frames without detections).
Returns the a similar array, where the last column is the object ID.
NOTE: The number of objects returned may differ from the number of detections provided.
"""
self.frame_count += 1
# get predicted locations from existing trackers.
trks = np.zeros((len(self.trackers), 5)) # [[x1,y1,x2,y2,ID],...]
to_del = [] # 待删除的预测框列表
ret = [] # 个人理解为,可满足显示条件的跟踪器
"""
1. 现有的跟踪器(列表),(全部)做一次预测
"""
for t, trk in enumerate(trks):
pos = self.trackers[t].predict()[0] # 在已有的跟踪器上,做一次预测
trk[:] = [pos[0], pos[1], pos[2], pos[3], 0] # 获得预测框的坐标
if np.any(np.isnan(pos)):
to_del.append(t) # 若有非法值则加入 to_del
# masked_invalid : 对掩码数组中的无效值做掩码处理;
# ma.compress_rows : 抑制包含屏蔽值的二维数组的行和/或列,默认则抑制行+列
trks = np.ma.compress_rows(np.ma.masked_invalid(trks))
# 删除 to_del 待删跟踪器
for t in reversed(to_del):
self.trackers.pop(t)
"""
2. 预测结果(预测框)和检测框(参数传入)做一次匹配
"""
# 做一次 检测框 、预测框 关联
matched, unmatched_dets, unmatched_trks = associate_detections_to_trackers(dets,trks, self.iou_threshold)
"""
3. 根据匹配结果,分别更新 matched / unmatched_detections / unmatched_trackers 三类
"""
# update matched trackers with assigned detections
# 更新匹配成功的跟踪器
for m in matched:
self.trackers[m[1]].update(dets[m[0], :])
# create and initialise new trackers for unmatched detections
# 为未匹配的检测框创建一个新的跟踪器
for i in unmatched_dets:
trk = KalmanBoxTracker(dets[i,:])
self.trackers.append(trk)
i = len(self.trackers)
for trk in reversed(self.trackers): # reversed : 返回一个反转的迭代器
d = trk.get_state()[0] # get_state() 返回 bbox
# 判断该跟踪器是时间、匹配次数是否满足条件,是则加入 ret 中
if (trk.time_since_update < 1) and (trk.hit_streak >= self.min_hits or self.frame_count <= self.min_hits):
ret.append(np.concatenate((d,[trk.id+1])).reshape(1,-1)) # +1 as MOT benchmark requires positive
i -= 1
# remove dead tracklet 如果最大年龄超限,则删除该跟踪器
if(trk.time_since_update > self.max_age):
self.trackers.pop(i)
if(len(ret)>0):
return np.concatenate(ret) # 拼接
return np.empty((0,5))
主函数
主函数流程:
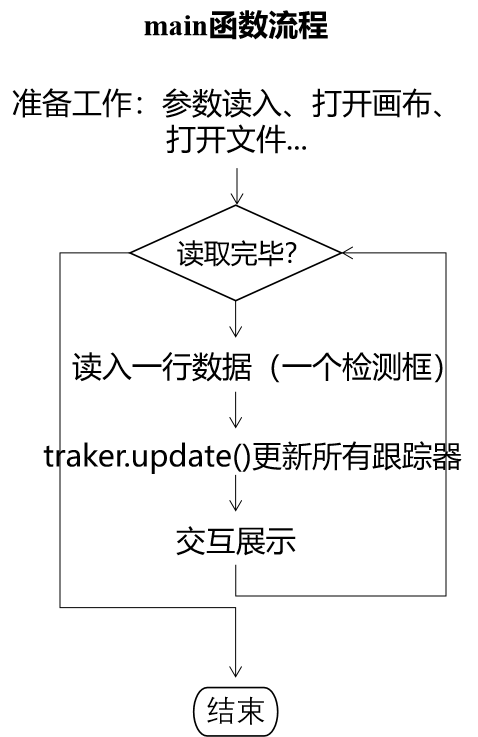
代码详细注释
if __name__ == '__main__':
"""
此例程使用现成的检测结果,保存在指定文件中;而不是实时获取检测框。
"""
# all train
args = parse_args()
display = args.display
phase = args.phase # train / test
total_time = 0.0
total_frames = 0
colours = np.random.rand(32, 3) #used only for display
if(display):
if not os.path.exists('mot_benchmark'):
print('\n\tERROR: mot_benchmark link not found!\n\n Create a symbolic link to the MOT benchmark\n (https://motchallenge.net/data/2D_MOT_2015/#download). E.g.:\n\n $ ln -s /path/to/MOT2015_challenge/2DMOT2015 mot_benchmark\n\n')
exit()
# 交互模式
plt.ion()
fig = plt.figure()
ax1 = fig.add_subplot(111, aspect='equal')
if not os.path.exists('output'):
os.makedirs('output')
pattern = os.path.join(args.seq_path, phase, '*', 'det', 'det.txt') # path.join 路径拼接 eg:'.\kuai\train*det\det.txt'
for seq_dets_fn in glob.glob(pattern): # glob:获取指定路径下所有满足条件的文件路径名
# 创建 Sort 对象 mot_tracker
mot_tracker = Sort(max_age=args.max_age,
min_hits=args.min_hits,
iou_threshold=args.iou_threshold) #create instance of the SORT tracker
seq_dets = np.loadtxt(seq_dets_fn, delimiter=',') # 按行读取一个文件 : 一行就是一个检测框! [x1,y1,x2,y2,score]
seq = seq_dets_fn[pattern.find('*'):].split(os.path.sep)[0] # path.sep : 将路径按层切分成列表;获得路径下文件名,在这里就是编号
with open(os.path.join('output', '%s.txt'%(seq)),'w') as out_file: # 以写方式打开文件
print("Processing %s."%(seq))
for frame in range(int(seq_dets[:,0].max())): # 找到该文件下第一列的最大值。第一列为帧序号,则为找到最大帧号
frame += 1 #detection and frame numbers begin at 1
dets = seq_dets[seq_dets[:, 0]==frame, 2:7] # 取出该 frame 下的 2-7 列
dets[:, 2:4] += dets[:, 0:2] #convert to [x1,y1,w,h] to [x1,y1,x2,y2] ; 2:4 是 w,h,0:2 是 x1,y1
total_frames += 1
if(display):
# 找到该帧对应的图片,并显示
fn = os.path.join('mot_benchmark', phase, seq, 'img1', '%06d.jpg'%(frame))
im =io.imread(fn)
ax1.imshow(im)
plt.title(seq + ' Tracked Targets')
start_time = time.time()
trackers = mot_tracker.update(dets) # 用检测框 dets 做一次更新; 返回满足条件可显示的 trackers ([x1,y1,x2,y2,ID])
cycle_time = time.time() - start_time
total_time += cycle_time
# 在画布上画出 trackers 对应的矩形框
for d in trackers:
print('%d,%d,%.2f,%.2f,%.2f,%.2f,1,-1,-1,-1'%(frame,d[4],d[0],d[1],d[2]-d[0],d[3]-d[1]),file=out_file)
if(display):
d = d.astype(np.int32)
ax1.add_patch(patches.Rectangle((d[0],d[1]),d[2]-d[0],d[3]-d[1],fill=False,lw=3,ec=colours[d[4]%32,:]))
if(display):
fig.canvas.flush_events() # 更新画图
plt.draw()
ax1.cla()
print("Total Tracking took: %.3f seconds for %d frames or %.1f FPS" % (total_time, total_frames, total_frames / total_time))
if(display):
print("Note: to get real runtime results run without the option: --display")















 637
637











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









