







Deep Regionlets: Blended Representation and Deep Learning for Generic Object Detection
Deep Learning for Generic Object Detection)
4 DEEP REGIONLETS
4.1 System Architecture
在一般的基于深度学习的目标检测模型中,由RPN 生成一组候选边界框,随后,分类网络确定边界框是否包含感兴趣的对象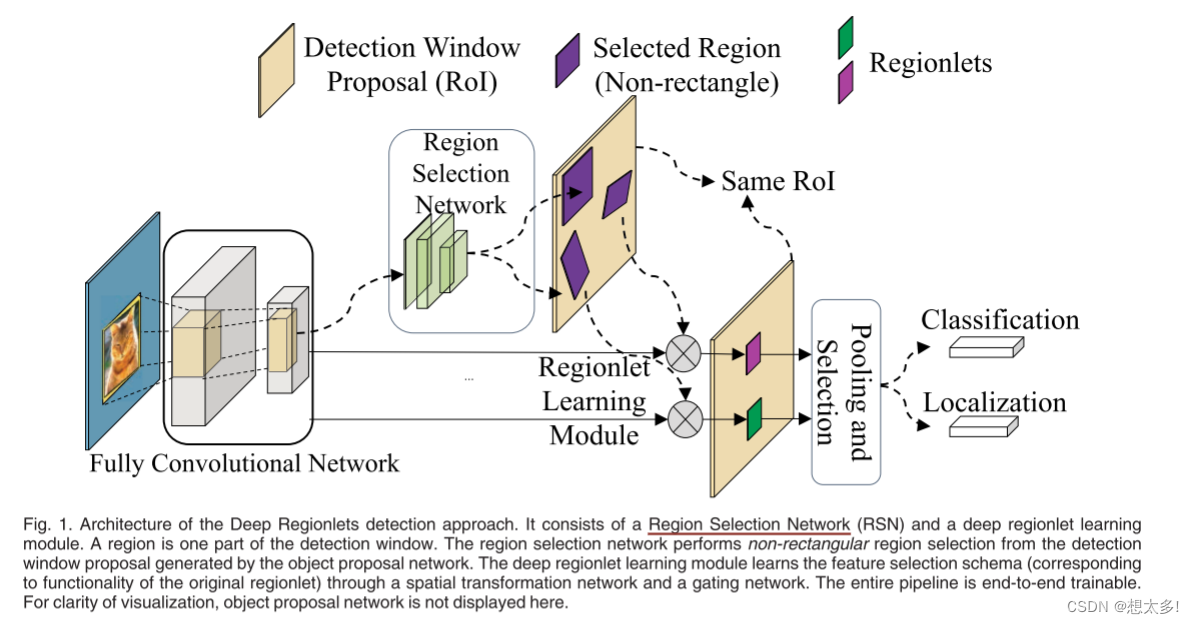
Fig. 1
- RSN(Region Selection Network)在RPN生成对象提议后选择其中的子区域进行灵活的特征提取
- 在每个选定的区域上可以同时学习RSN和区域学习模型
4.2 Region Selection Network
RSN具有以下属性:
- 端到端可训练
- 结构简单,不引入过多的参数
- 生成具有任意形状的区域
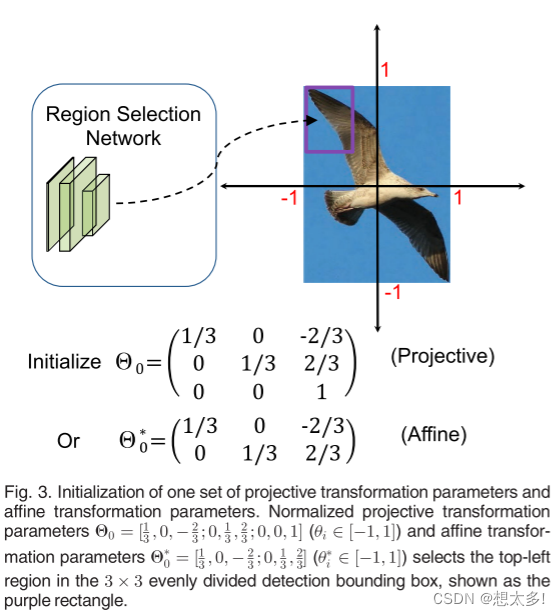
Fig. 3,RSN的结构,三层FC,一组投影变换参数和仿射变换参数的初始化
4.3 Deep Regionlet Learning
目标:是从由一组投影变换参数θ定义的一个选定区域中学习,以更好地匹配对象的形状
4.3.1 BackPropagation Through Spatial Transform
通过空间变换进行反向传播,获得特征图变量 U^c_ mn 和 投影变换参数θ的偏导数
4.3.2 Gating Network
-
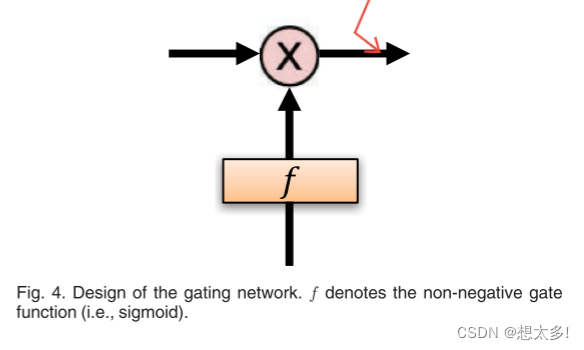
使用门控网络以柔和的方式执行精细的特征选择和池化来扩展最初的Regionlet工作。
-
门控网络用作软regionlet选择器,用于分配具有不同权重的regionlet并生成regionlet特征表示
-
具体:由一个全连接层,用Sigmoid函数激活,输出特征图
5 RELATIONS TO RECENT WORKS
5.1 Spatial Transform Networks
The RSN learns a set of projective transformation and each transformation can be considered as the localization network (RSN学习一组投影变换,每个变换都可以视为本地化网络)
所提出的方法提供了学习具有可变形状和可变形部件的对象的紧凑,有效的特征表示的灵活性
7 CONCLUSION
在本文中,我们提出了一种新颖的基于深度区域的目标检测方法。所提出的区域选择网络可以在检测边界框内选择非矩形区域,从而可以更好地对具有刚性形状和可变形部件的对象进行建模。我们还设计了深度区域学习模块,以便可以同时学习所选区域和区域。此外,无需额外的努力,就可以以完全端到端的方式对拟议的系统进行培训。最后,我们在通用对象检测的两个检测基准上广泛评估了我们的方法。实验结果表明,竞争性能优于最新技术。















 147
147











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









