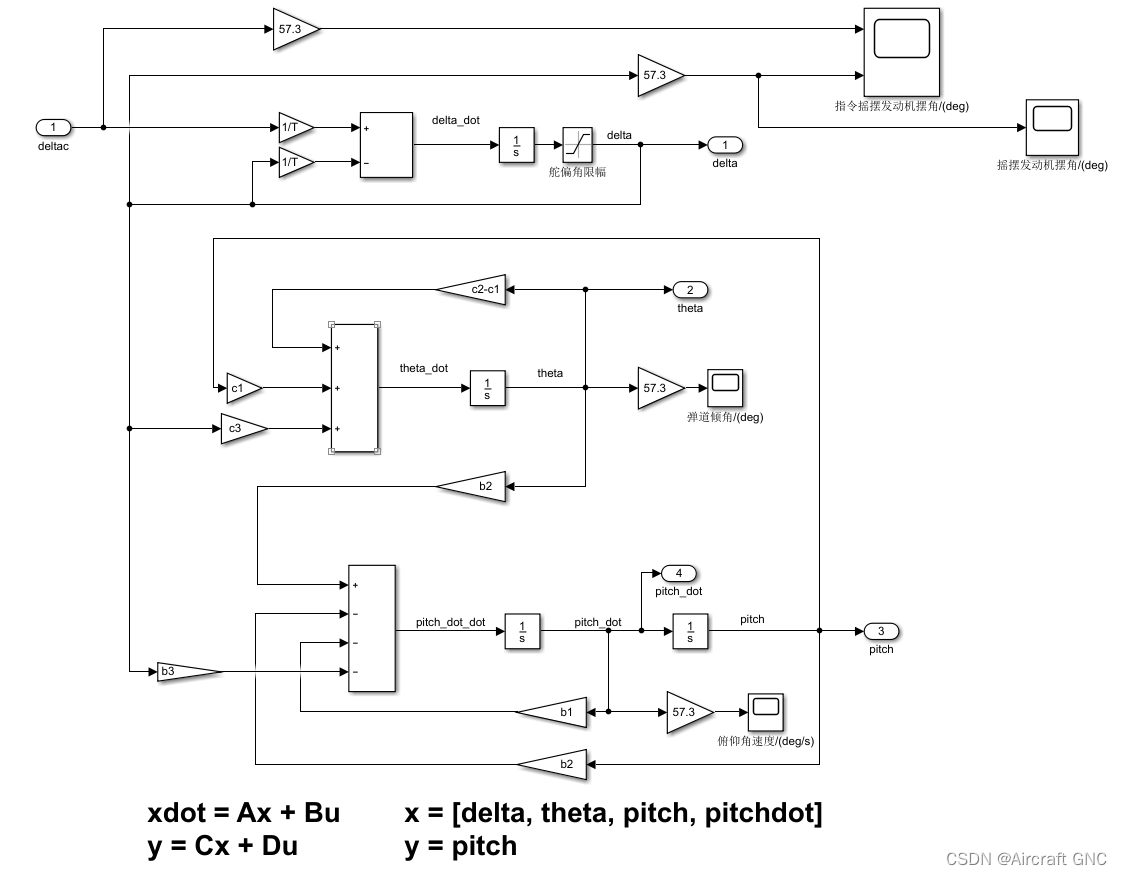
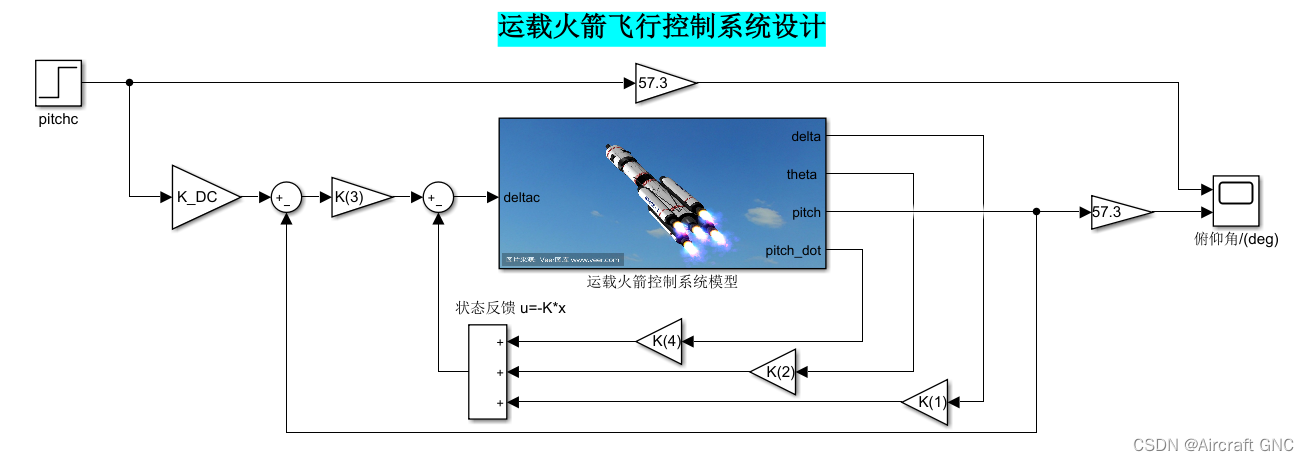
运载火箭飞行控制系统设计







于 2022-09-18 17:48:57 首次发布
 1219
1219











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言