






最近一直在做机器学习和能源系统优化相关的前期学习,根据以前导师的推荐,尝试强化学习方法在能源调度优化中的应用,一些简单的测试分享给大家,如果有大佬有改进或其他建议欢迎交流。
1. 背景介绍
在能源系统中,面对多样化的能源需求(如电力、热力、冷需求)和不确定的可再生能源供应(如风电、光伏),如何实现能源的高效调度成为一个重要问题。多能系统的调度优化需要在以下目标之间进行权衡:
- 满足能源需求:保证电力、热力和冷需求的实时供应。
- 优化储能设备使用:合理利用储能设备(如电池)进行充放电。
- 碳捕集与成本控制:在满足低碳目标的同时,降低碳捕集设备的运行成本。
- 传统方法往往基于线性规划或动态规划,难以应对系统的非线性、不确定性和高维特性。强化学习(Reinforcement Learning, RL) 提供了一种新思路,通过智能体与环境的交互,不断优化策略,动态适应复杂的能源调度场景。
- 模型框架
本文采用 Soft Actor-Critic (SAC) 算法,结合 Gym 环境自定义了一个多能系统的调度优化模型,主要由以下几个部分构成:
2.1 状态空间
状态空间用于描述当前多能系统的运行状态,本文设计了 6 个状态变量:
电力需求(Power Demand)
热需求(Heat Demand)
冷需求(Cooling Demand)
储能状态(SOC, State of Charge)
风电输出(Wind Power)
光伏输出(PV Power)
这些状态变量的取值范围被归一化到 [0,1]
2.2 动作空间
动作空间表示智能体可以采取的控制动作,包括:
储能充放电功率(Storage Power):取值范围 [−1,1],正值表示充电,负值表示放电。
碳捕集设备加载率(Carbon Capture Rate):取值范围 [0,1],表示碳捕集设备的运行负荷率。
2.3 奖励函数
奖励函数用于评估每一步智能体动作的优劣,包含两个部分:
能量平衡奖励
R b a l a n c e = − m a x ( 0 , 需求总量 − 供应总量 ) R_{balance} = -max(0, 需求总量 - 供应总量) Rbalance=−max(0,需求总量−供应总量)
碳捕集成本奖励
R c a r b o n = − 0.1 ∗ 碳捕集率 R_{carbon} = -0.1 * 碳捕集率 Rcarbon=−0.1∗碳捕集率
总奖励函数
R = R b a l a n c e + R c a r b o n R = R_{balance} + R_{carbon} R=Rbalance+Rcarbon
2.4 学习目标
智能体通过 SAC 算法学习一个最优策略 (\pi(a|s)),以最大化累积奖励:
G t = Σ ( γ k ∗ R ( s t + k , a t + k ) ) G_t = Σ (γ^k * R(s_{t+k}, a_{t+k})) Gt=Σ(γk∗R(st+k,at+k))
其中:
- (G_t):从当前时间步 (t) 开始的累计折扣奖励;
- (γ):折扣因子,用于权衡短期和长期奖励,取值范围 ([0, 1])。
环境更新公式
储能状态更新
S O C = c l i p ( S O C + S t o r a g e P o w e r ∗ 0.05 , 0 , 1 ) SOC = clip(SOC + Storage Power * 0.05, 0, 1) SOC=clip(SOC+StoragePower∗0.05,0,1)
其中:
- (SOC):储能设备的状态,范围为 ([0, 1]);
- (Storage Power):储能的充放电功率;
- (clip):限制范围在 ([0, 1])。
3. 模型工作流程
模型的整体流程如下:
- 初始化环境:
定义状态空间、动作空间和初始状态。 - 智能体交互:
智能体根据策略网络 (Π(a|s)) 输出动作,与环境交互并获取新的状态和奖励。 - 奖励计算:
根据智能体的行为,环境计算奖励,智能体用此信息优化策略。 - 终止条件:
当时间步达到 200 或其他终止条件时,回合结束,重新初始化环境。
在stable_baselines3中我们创建的SAC框架下,默认采用MLP作为神经网络(且奖励网络
源代码
测试库环境是否正确,测试在python3.9.20环境中完成
import gym
import stable_baselines3
import optuna
import numpy
print(gym.__version__)
print(stable_baselines3.__version__)
print(optuna.__version__)
print(numpy.__version__)
输出如下:
0.26.2
2.4.0
4.1.0
1.26.4
e:\Pythonworkshop\DRL_work\.conda\lib\site-packages\tqdm\auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
项目测试代码:
import numpy as np
import gym
from gym import spaces
from stable_baselines3 import SAC
from stable_baselines3.common.vec_env import DummyVecEnv
from stable_baselines3.common.callbacks import EvalCallback
import optuna
class MultiEnergySystemEnv(gym.Env):
def __init__(self):
super(MultiEnergySystemEnv, self).__init__()
# 状态空间:电力需求、热需求、冷需求、储能SOC、风电、光伏
self.observation_space = spaces.Box(low=0, high=1, shape=(6,), dtype=np.float32)
# 动作空间:储能充放电功率[-1, 1],碳捕集设备加载率[0, 1]
self.action_space = spaces.Box(low=np.array([-1, 0]), high=np.array([1, 1]), dtype=np.float32)
# 初始化状态
self.state = self.reset()
self.timestep = 0
def reset(self):
# 初始化状态
self.timestep = 0
self.state = np.random.uniform(0, 1, size=(6,))
return self.state
def step(self, action):
"""
动作的执行:
- action[0]: 储能充放电功率(-1到1),这里假设功率是可以直接调节的,而且没设置上下限
- action[1]: 碳捕集设备加载率(0到1),同理。
"""
power_demand, heat_demand, cooling_demand, soc, wind_power, pv_power = self.state
storage_power = action[0]
carbon_capture_rate = action[1]
# 更新储能状态
soc = np.clip(soc + storage_power * 0.05, 0, 1)
# 奖励函数:
# 1. 满足需求的程度(正向奖励),因为是随机的数据,所以采用简单的正向奖励,满足需求的程度越高,奖励越高,没满足就是负值奖励
renewable_supply = wind_power + pv_power + storage_power
unmet_demand = max(0, power_demand + heat_demand + cooling_demand - renewable_supply)
energy_balance_penalty = -unmet_demand
# 2. 碳捕集成本(负向奖励),碳捕捉的开启量越多,成本越高,是一个负向奖励,但是我们要实现碳捕捉达到碳平衡,所以需要衡量。
carbon_capture_cost = -0.1 * carbon_capture_rate
# 总奖励
reward = energy_balance_penalty + carbon_capture_cost
# 更新状态
self.state = np.random.uniform(0, 1, size=(6,))
self.state[3] = soc # 保留SOC状态
self.timestep += 1
# 结束条件
done = self.timestep >= 200
return self.state, reward, done, {}
def render(self, mode='human'):
pass
# 创建环境
env = DummyVecEnv([lambda: MultiEnergySystemEnv()])
# 使用Optuna优化超参数
def optimize_sac(trial):
# 超参数搜索空间
learning_rate = trial.suggest_loguniform('learning_rate', 1e-4, 1e-2)
batch_size = trial.suggest_categorical('batch_size', [64, 128, 256])
gamma = trial.suggest_uniform('gamma', 0.9, 0.99)
# 初始化模型
model = SAC("MlpPolicy", env, learning_rate=learning_rate, batch_size=batch_size, gamma=gamma, verbose=0)
# 定义评估回调
eval_callback = EvalCallback(env, eval_freq=500, n_eval_episodes=5, deterministic=True, verbose=0)
# 训练模型
model.learn(total_timesteps=5000, callback=eval_callback)
# 返回评估奖励
return eval_callback.last_mean_reward
# 使用Optuna调优超参数
study = optuna.create_study(direction='maximize')
study.optimize(optimize_sac, n_trials=10)
# 获取最佳超参数
best_params = study.best_params
print("Best Hyperparameters:", best_params)
# # 使用最佳超参数训练最终模型
final_model = SAC("MlpPolicy", env, learning_rate=best_params['learning_rate'], batch_size=best_params['batch_size'], gamma=best_params['gamma'], verbose=1)
final_model.learn(total_timesteps=10000)
# 测试模型
# obs = env.reset()
# for _ in range(200):
# action, _states = final_model.predict(obs, deterministic=True)
# obs, reward, done, info = env.step(action)
# if done:
# break
输出如下,这里注释可以在简单测试中直接输出(我这里注释掉是因为后续还有可视化代码,我挪到了后面的代码中。
[I 2024-11-26 15:12:57,728] Trial 1 finished with value: -24.918968804553153 and parameters: {'learning_rate': 0.0005655815624737378, 'batch_size': 128, 'gamma': 0.9662472727755294}. Best is trial 1 with value: -24.918968804553153.
[I 2024-11-26 15:14:10,829] Trial 2 finished with value: -50.52137580886483 and parameters: {'learning_rate': 0.00014604497098531745, 'batch_size': 64, 'gamma': 0.9032240575945991}. Best is trial 1 with value: -24.918968804553153.
[I 2024-11-26 15:15:24,957] Trial 3 finished with value: -25.443975274125116 and parameters: {'learning_rate': 0.0037060046463788833, 'batch_size': 256, 'gamma': 0.9818166794679356}. Best is trial 1 with value: -24.918968804553153.
[I 2024-11-26 15:16:39,040] Trial 4 finished with value: -21.29798140048515 and parameters: {'learning_rate': 0.007417257237361141, 'batch_size': 64, 'gamma': 0.9255433805615282}. Best is trial 4 with value: -21.29798140048515.
[I 2024-11-26 15:17:54,145] Trial 5 finished with value: -23.787771976180373 and parameters: {'learning_rate': 0.0008033039100736049, 'batch_size': 64, 'gamma': 0.9048781993641628}. Best is trial 4 with value: -21.29798140048515.
[I 2024-11-26 15:19:05,608] Trial 6 finished with value: -24.925974791962652 and parameters: {'learning_rate': 0.0014261015828433456, 'batch_size': 256, 'gamma': 0.9170627412247911}. Best is trial 4 with value: -21.29798140048515.
[I 2024-11-26 15:20:13,904] Trial 7 finished with value: -42.311299515515564 and parameters: {'learning_rate': 0.0002078766135331994, 'batch_size': 256, 'gamma': 0.935028694164879}. Best is trial 4 with value: -21.29798140048515.
[I 2024-11-26 15:21:23,830] Trial 8 finished with value: -23.916750478430185 and parameters: {'learning_rate': 0.002963057386666943, 'batch_size': 128, 'gamma': 0.9080140367653581}. Best is trial 4 with value: -21.29798140048515.
[I 2024-11-26 15:22:35,843] Trial 9 finished with value: -19.814121935679577 and parameters: {'learning_rate': 0.0008142906301786324, 'batch_size': 64, 'gamma': 0.9677305642804671}. Best is trial 9 with value: -19.814121935679577.
Best Hyperparameters: {'learning_rate': 0.0008142906301786324, 'batch_size': 64, 'gamma': 0.9677305642804671}
Using cuda device
---------------------------------
| time/ | |
| episodes | 4 |
| fps | 91 |
| time_elapsed | 8 |
| total_timesteps | 800 |
| train/ | |
| actor_loss | -1.9 |
| critic_loss | 0.137 |
| ent_coef | 0.57 |
| ent_coef_loss | -1.73 |
| learning_rate | 0.000814 |
| n_updates | 699 |
---------------------------------
过多,后续省略
可视化代码如下:
import numpy as np
import matplotlib.pyplot as plt
obs = env.reset()
# 初始化存储变量
rewards = []
actions = []
states = []
# 测试模型
for _ in range(200):
action, _states = final_model.predict(obs, deterministic=True)
obs, reward, done, info = env.step(action)
actions.append(action.reshape(-1))
rewards.append(reward)
states.append(obs.reshape(-1))
if done:
break
actions = np.array(actions)
states = np.array(states)
if len(states.shape) == 1:
states = states.reshape(-1, 1)
rewards = np.array(rewards)
# 奖励趋势
plt.figure(figsize=(10, 6))
plt.plot(rewards, label="Reward per Step")
plt.title("Reward Over Time")
plt.xlabel("Time Step")
plt.ylabel("Reward")
plt.legend()
plt.grid()
plt.show()
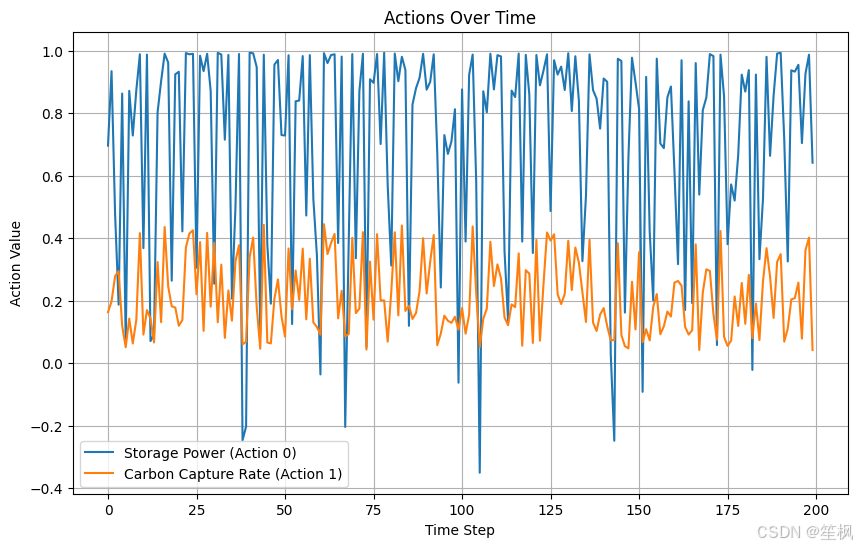
# 动作变化趋势
plt.figure(figsize=(10, 6))
plt.plot(actions[:, 0], label="Storage Power (Action 0)")
if actions.shape[1] > 1: # 如果有多个动作
plt.plot(actions[:, 1], label="Carbon Capture Rate (Action 1)")
plt.title("Actions Over Time")
plt.xlabel("Time Step")
plt.ylabel("Action Value")
plt.legend()
plt.grid()
plt.show()
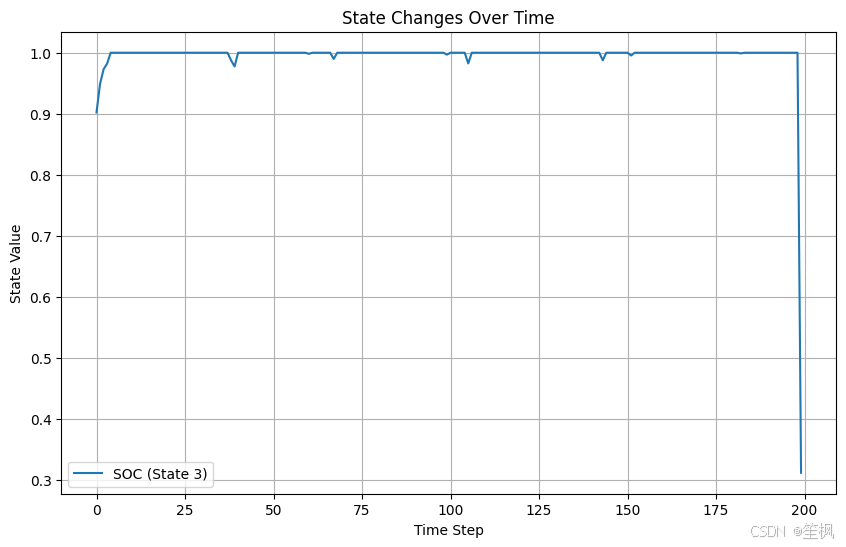
#关键状态变量
plt.figure(figsize=(10, 6))
# 如果状态空间有多维,可以绘制储能状态 (SOC)
if states.shape[1] > 3: # 确保第 4 列 (索引为 3) 存在
plt.plot(states[:, 3], label="SOC (State 3)") # 绘制储能设备状态 (SOC)
else:
print("State dimension too small, cannot plot SOC.")
plt.title("State Changes Over Time")
plt.xlabel("Time Step")
plt.ylabel("State Value")
plt.legend()
plt.grid()
plt.show()
# 平滑奖励趋势
def moving_average(data, window_size):
data = np.array(data).flatten()
return np.convolve(data, np.ones(window_size) / window_size, mode='valid')
# 平滑奖励曲线
rewards = np.array(rewards).flatten()
plt.figure(figsize=(10, 6))
plt.plot(moving_average(rewards, window_size=10), label="Smoothed Reward")
plt.title("Smoothed Reward Over Time")
plt.xlabel("Time Step")
plt.ylabel("Smoothed Reward")
plt.legend()
plt.grid()
plt.show()
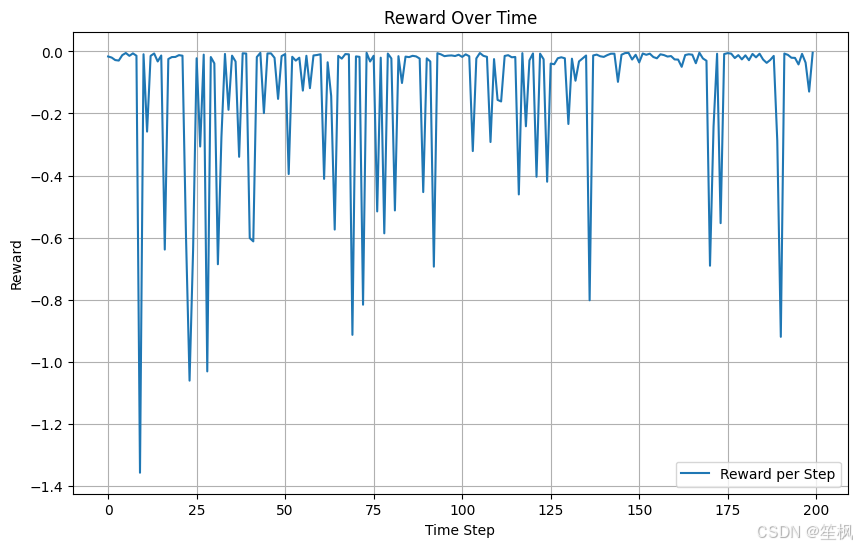
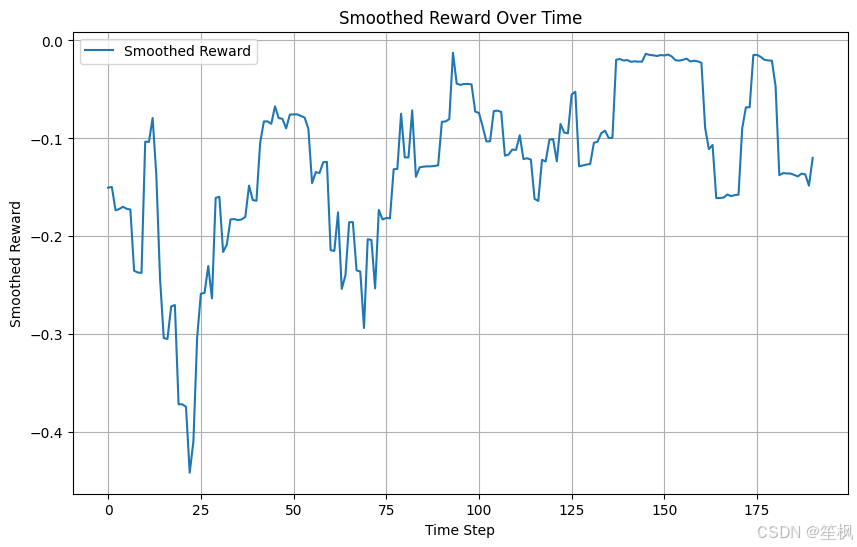
在本次测试当中,以测试项目是否具有可行性、代码是否可以跑通为主,对结果的正确性不做保证,目前来看在随机生成的数据中,强化学习的代理模型仍能够尽可能像最大化奖励运行,初步验证可行。
相比优化求解器来确定我们能源调度的最优解,利用强化学习可能带来的优点如下:
- 动态适应性强:适合处理不确定性和动态变化的复杂环境。
- 无需显式建模:避免复杂数学建模,适配高维非线性问题。
- 实时性强:训练后推理速度快,适合实时调度和控制。

















 965
965

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









