







 本文介绍了三种实现Mosaic数据增强的方法,适用于目标检测任务。Mosaic通过组合四张图片,增强训练数据,提升模型的泛化能力。第一种方法直接对图片进行放缩组合;第二种通过类定义实现,包括色域变换和随机翻转;第三种利用PyTorch的DataLoader。所有方法在1024x1024尺寸时可能出现标签对应不准确的问题,但在其他尺寸下效果良好。
本文介绍了三种实现Mosaic数据增强的方法,适用于目标检测任务。Mosaic通过组合四张图片,增强训练数据,提升模型的泛化能力。第一种方法直接对图片进行放缩组合;第二种通过类定义实现,包括色域变换和随机翻转;第三种利用PyTorch的DataLoader。所有方法在1024x1024尺寸时可能出现标签对应不准确的问题,但在其他尺寸下效果良好。
近几天在研究数据增强的方式,看到了mosaic,并且需要用到它,查阅了一些代码,根据个人数据,修改了代码,现有三套代码实现了mosaic,但也有些许问题。
mosaic数据增强方式是一次性从数据集中随机读取四张图片进行放缩或裁剪,然后将初步处理的四张图片按照左上、左下、右下、右上的顺序进行位置分布,组合后得到一张新的图,并将标签数据处理后进行对应。
mosaic的优势,一次性输入四张图,受batchsize的影响较小,数据增强方式,增加训练数据,组合后的图像拥有不同的背景,空间语义信息更加丰富,增强模型的泛化性能,这些都是可能带来的增益。
根据前后的学习经验,放出调试运行通过的三套代码,主要是网上找的含有mosaic功能的函数,自己添加数据加载方式进行调试调用可以得到输出结果,并有相应结果可视化展示,三种方法的区别主要是输入数据集的格式有区别,一次性读取四张图片的方式不太一样,具体细节见代码
第一种mosaic方式
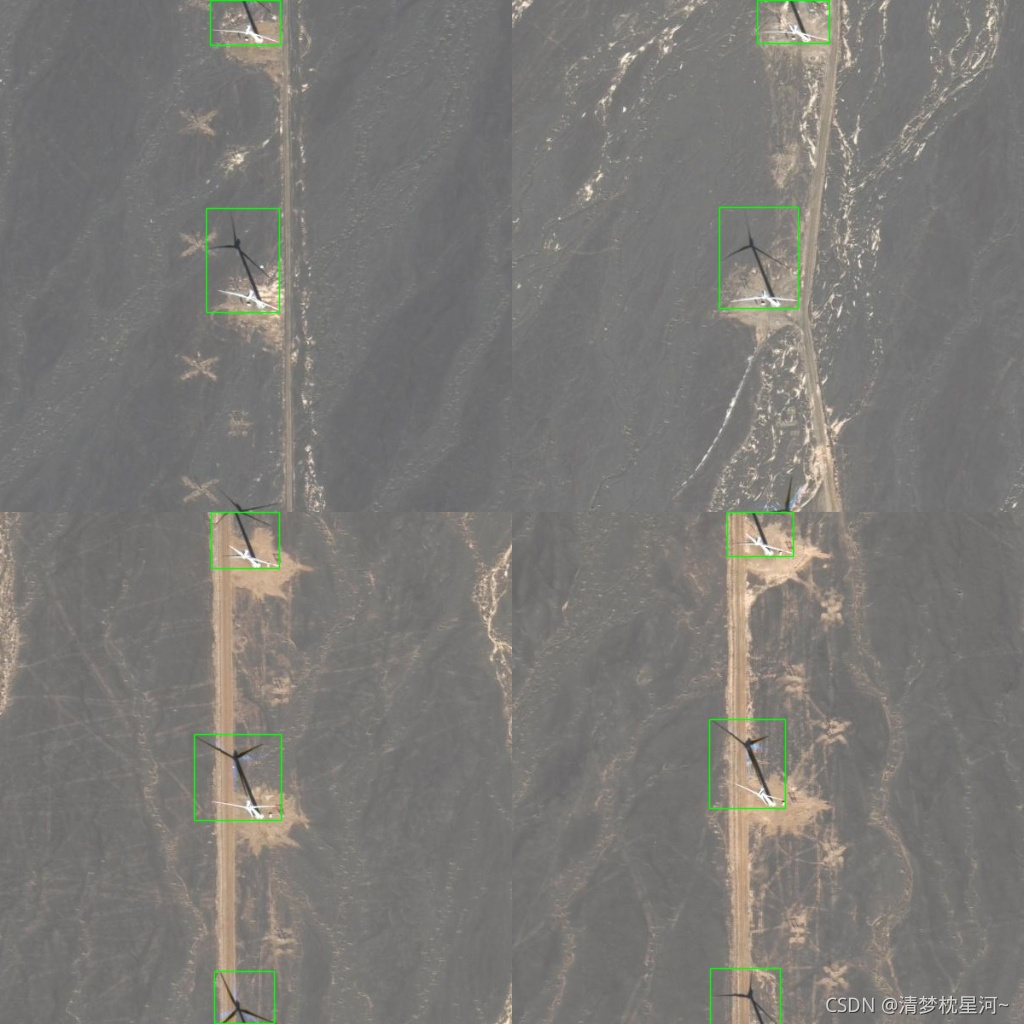
四张图片只进行放缩后就组合,数据采用voc格式数据,最终返回合并后的图片和标注信息,并将结果做了可视化。
import random
import cv2
import os
import glob
import numpy as np
from PIL import Image
from lxml import etree
from ipdb import set_trace
OUTPUT_SIZE = (1024, 1024) # Height, Width
SCALE_RANGE = (0.5, 0.5)
FILTER_TINY_SCALE = 1 / 50 # if height or width lower than this scale, drop it.
#voc格式的数据集,anno_dir是标注xml文件,img_dir是对应jpg图片
ANNO_DIR = './dataset/wind_turbine/600/Annotations'
IMG_DIR ='./dataset/wind_turbine/600/Images'
# category_name = ['background', 'person']
def main():
img_paths, annos = get_dataset(ANNO_DIR, IMG_DIR)
# set_trace()
idxs = random.sample(range(len(annos)), 4)#从annos列表长度中随机取4个数
# set_trace()
new_image, new_annos = update_image_and_anno(img_paths, annos,
idxs,
OUTPUT_SIZE, SCALE_RANGE,
filter_scale=FILTER_TINY_SCALE)
#更新获取新图和对应anno
cv2.imwrite('./img/wind_output.jpg', new_image)
#annos是
for anno in new_annos:
start_point = (int(anno[1] * OUTPUT_SIZE[1]), int(anno[2] * OUTPUT_SIZE[0]))#左上角点
end_point = (int(anno[3] * OUTPUT_SIZE[1]), int(anno[4] * OUTPUT_SIZE[0]))#右下角点
cv2.rectangle(new_image, start_point, end_point, (0, 255, 0), 1, cv2.LINE_AA)#每循环一次在合成图画一个矩形
cv2.imwrite('./img/wind_output_box.jpg', new_image)
new_image = cv2.cvtColor(new_image, cv2.COLOR_BGR2RGB)
new_image = Image.fromarray(new_image.astype(np.uint8))
# new_image.show()
# cv2.imwrite('./img/wind_output111.jpg', new_image)
def update_image_and_anno(all_img_list, all_annos, idxs, output_size, scale_range, filter_scale=0.):
output_img = np.zeros([output_size[0], output_size[1], 3], dtype=np.uint8)
scale_x = scale_range[0] + random.random() * (scale_range[1] - scale_range[0])
scale_y = scale_range[0] + random.random() * (scale_range[1] - scale_range[0])
divid_point_x = int(scale_x * output_size[1])
divid_point_y = int(scale_y * output_size[0])
new_anno = []
for i, idx in enumerate(idxs):
set_trace()
path = all_img_list[idx]
img_annos = all_annos[idx]
img = cv2.imread(path)
if i == 0: # top-left
img = cv2.resize(img, (divid_point_x, divid_point_y))
output_img[:divid_point_y, :divid_point_x, :] = img
for bbox in img_annos:
xmin = bbox[1] * scale_x
ymin = bbox[2] * scale_y
xmax = bbox[3] * scale_x
ymax = bbox[4] * scale_y
new_anno.append([bbox[0], xmin, ymin, xmax, ymax])
elif i == 1: # top-right
img = cv2.resize(img, (output_size[1] - divid_point_x, divid_point_y))
output_img[:divid_point_y, divid_point_x:output_size[1], :] = img
for bbox in img_annos:
xmin = scale_x + bbox[1] * (1 - scale_x)
ymin = bbox[2] * scale_y
xmax = scale_x + bbox[3] * (1 - scale_x)
ymax = bbox[4] * scale_y
new_anno.append([bbox[0], xmin, ymin, xmax, ymax])
elif i == 2: # bottom-left
img = cv2.resize(img, (divid_point_x, output_size[0] - divid_point_y))
output_img[divid_point_y:output_size[0], :divid_point_x, :] = img
for bbox in img_annos:
xmin = bbox[1] * scale_x
ymin = scale_y + bbox[2] * (1 - scale_y)
xmax = bbox[3] * scale_x
ymax = scale_y + bbox[4] * (1 - scale_y)
new_anno.append([bbox[0], xmin, ymin, xmax, ymax])
else: # bottom-right
img = cv2.resize(img, (output_size[1] - divid_point_x, output_size[0] - divid_point_y))
output_img[divid_point_y:output_size[0], divid_point_x:output_size[1], :] = img
for bbox in img_annos:
xmin = scale_x + bbox[1] * (1 - scale_x)
ymin = scale_y + bbox[2] * (1 - scale_y)
xmax = scale_x + bbox[3] * (1 - scale_x)
ymax = scale_y + bbox[4] * (1 - scale_y)
new_anno.append([bbox[0], xmin, ymin, xmax, ymax])
return output_img, new_anno
def get_dataset(anno_dir, img_dir):
# class_id = category_name.index('person')
img_paths = []
annos = []
# for anno_file in glob.glob(os.path.join(anno_dir, '*.txt')):
for anno_file in glob.glob(os.path.join(anno_dir, '*.xml')):
# anno_id = anno_file.split('/')[-1].split('.')[0]
anno_id = anno_file.split('/')[-1].split('x')[0]
# set_trace()
# with open(anno_file, 'r') as f:
# num_of_objs = int(f.readline())
# set_trace()
img_path = os.path.join(img_dir, f'{anno_id}jpg')
print(img_path)
img = cv2.imread(img_path)
# set_trace()
img_height, img_width, _ = img.shape
print(img.shape)
del img
boxes = []
bnd_box = parseXmlFiles(anno_file)
print(bnd_box)
for bnd_id, box in enumerate(bnd_box):
# set_trace()
categories_id = box[0]
xmin = max(int(box[1]), 0) / img_width
ymin = max(int(box[2]), 0) / img_height
xmax = min(int(box[3]), img_width) / img_width
ymax = min(int(box[4]), img_height) / img_height
boxes.append([categories_id, xmin, ymin, xmax, ymax])
print(boxes)
if not boxes:
continue
img_paths.append(img_path)
annos.append(boxes)
print("annos:所有对原图缩放后的坐标:",annos)
print(img_paths)
return img_paths, annos
def parseXmlFiles(anno_dir):
tree = etree.parse(anno_dir)
root = tree.getroot()
objectes = root.findall('.//object')
bnd_box = []
for object in objectes:
name = object.find("name").text
bndbox = object.find("bndbox")
xmin = float(bndbox.find("xmin").text)
xmax = float(bndbox.find("xmax").text)
ymin = float(bndbox.find("ymin").text)
ymax = float(bndbox.find("ymax").text)
# bnd_box.append([name, xmin, xmax, ymin, ymax])
bnd_box.append([name, xmin, ymin, xmax, ymax])
# print(len(bnd_box),bnd_box)
return bnd_box
if __name__ == '__main__':
main()
效果如下:
合并后的图,将标签画在合并后的图上的效果

第二种mosaic方式:
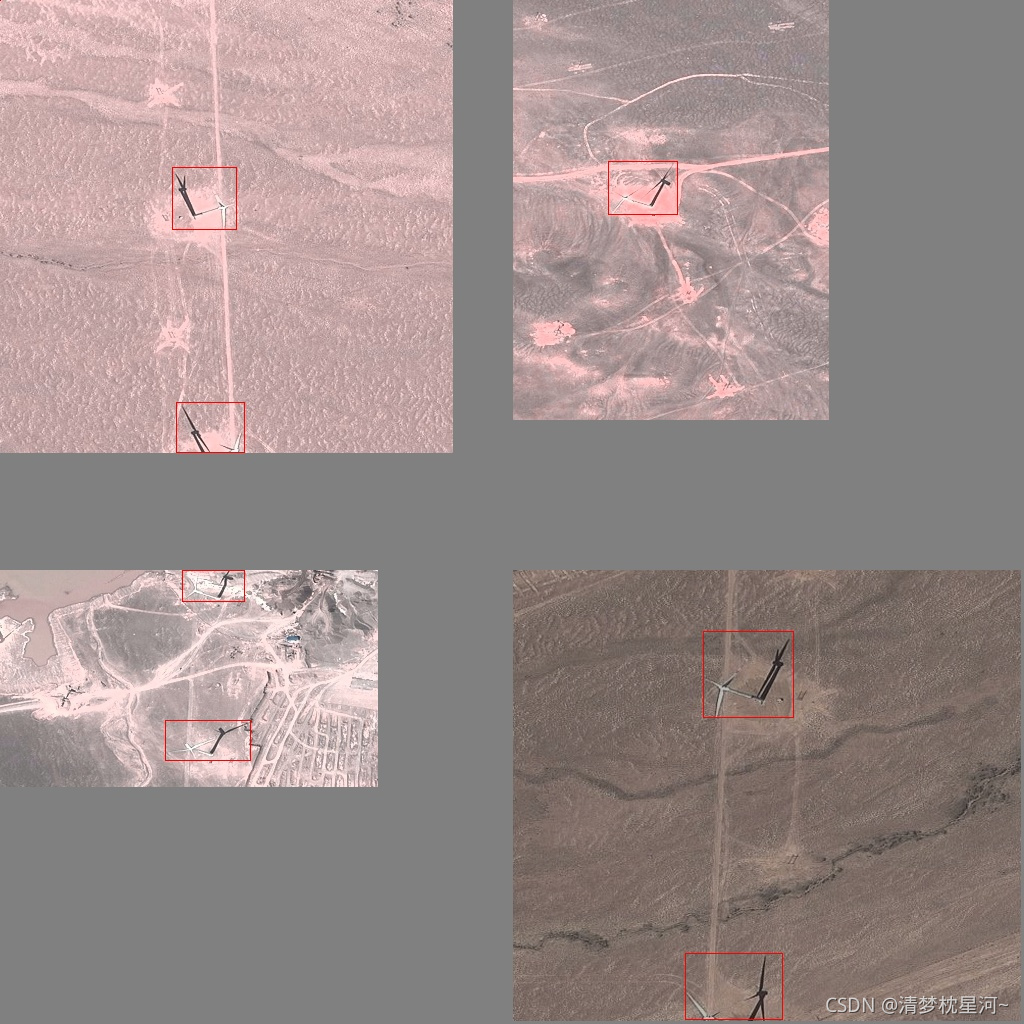
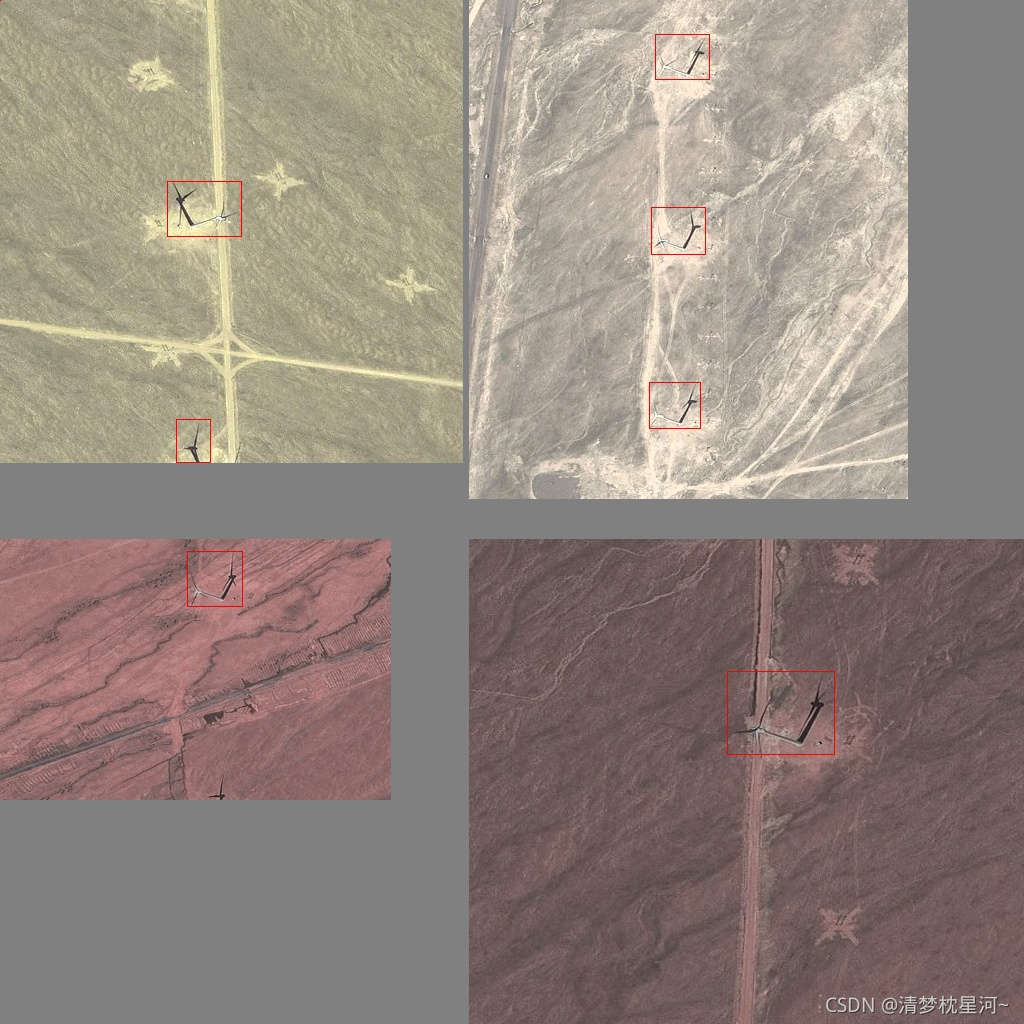
数据读取函数稍作修改,通过类定义调取mosaic,最终输出合成图和对应的标签文件
# -*- coding: utf-8 -*-
import random
import os
import cv2
import glob
from lxml import etree
from PIL import Image
import numpy as np
from ipdb import set_trace
def merge_bboxes(bboxes, cutx, cuty):
merge_bbox = []
for i in range(len(bboxes)):
for box in bboxes[i]:
tmp_box = []
x1, y1, x2, y2 = box[0], box[1], box[2], box[3]
if i == 0:
if y1 > cuty or x1 > cutx:
continue
if y2 >= cuty and y1 <= cuty:
y2 = cuty
if y2 - y1 < 5:
continue
if x2 >= cutx and x1 <= cutx:
x2 = cutx
if x2 - x1 < 5:
continue
if i == 1:
if y2 < cuty or x1 > cutx:
continue
if y2 >= cuty and y1 <= cuty:
y1 = cuty
if y2 - y1 < 5:
continue
if x2 >= cutx and x1 <= cutx:
x2 = cutx
if x2 - x1 < 5:
continue
if i == 2:
if y2 < cuty or x2 < cutx:
continue
if y2 >= cuty and y1 <= cuty:
y1 = cuty
if y2 - y1 < 5:
continue
if x2 >= cutx and x1 <= cutx:
x1 = cutx
if x2 - x1 < 5:
continue
if i == 3:
if y1 > cuty or x2 < cutx:
continue
if y2 >= cuty and y1 <= cuty:
y2 = cuty
if y2 - y1 < 5:
continue
if x2 >= cutx and x1 <= cutx:
x1 = cutx
if x2 - x1 < 5:
continue
tmp_box.append(x1)
tmp_box.append(y1)
tmp_box.append(x2)
tmp_box.append(y2)
tmp_box.append(box[-1])
merge_bbox.append(tmp_box)
return merge_bbox
class Data_augmentation_with_Mosaic():
def __init__(self,
four_annotation_lines,
input_shape,
max_boxes=100,
hue=.1,
sat=1.5,
val=1.5,
visual=True):
self.four_annotation_lines = four_annotation_lines
self.h, self.w = input_shape
self.min_offset_x = 0.4
self.min_offset_y = 0.4
self.scale_low = 1 - min(self.min_offset_x, self.min_offset_y)- 0.3# 改动
self.scale_high = self.scale_low + 0.2 + 0.3# 改动
# print(self.scale_low, self.scale_high)
self.max_boxes = max_boxes
self.hue = hue
self.sat = sat
self.val = val
self.place_x = [0, 0, int(self.w * self.min_offset_x), int(self.w * self.min_offset_x)]
self.place_y = [0, int(self.h * self.min_offset_y), int(self.h * self.min_offset_y), 0]
self.visual = visual
def main(self):
image_datas = []
box_datas = []
index = 0
for annotation_line in self.four_annotation_lines:
# 每一行进行分割
# line_content = annotation_line.split()
# 打开图片
# image = Image.open(line_content[0])
image = Image.open(annotation_line[-1])
image = image.convert("RGB")
# 图片的大小
iw, ih = image.size
# 保存框的位置
# box = np.array([np.array(list(map(int, box.split(',')))) for box in line_content[1:]])
box = np.array([np.array(elm) for elm in annotation_line[:-1]])
# 是否翻转图片
flip = np.random.rand() < .5
if flip and len(box) > 0:
image = image.transpose(Image.FLIP_LEFT_RIGHT)
box[:, [0, 2]] = iw - box[:, [2, 0]]
# 对输入进来的图片进行缩放
new_ar = self.w / self.h
scale = np.random.uniform(self.scale_low, self.scale_high)
if new_ar < 1:
nh = int(scale * self.h)
nw = int(nh * new_ar)
else:
nw = int(scale * self.w)
nh = int(nw / new_ar)
image = image.resize((nw, nh), Image.BICUBIC)
# 进行色域变换
hue = np.random.uniform(-self.hue, self.hue)
sat = np.random.uniform(1, self.sat) if np.random.uniform() < .5 else 1 / np.random.uniform(1, self.sat)
val = np.random.uniform(1, self.val) if np.random.uniform() < .5 else 1 / np.random.uniform(1, self.val)
x = cv2.cvtColor(np.array(image, np.float32) / 255, cv2.COLOR_RGB2HSV)
x[..., 0] += hue * 360
x[..., 0][x[..., 0] > 1] -= 1
x[..., 0][x[..., 0] < 0] += 1
x[..., 1] *= sat
x[..., 2] *= val
x[x[:, :, 0] > 360, 0] = 360
x[:, :, 1:][x[:, :, 1:] > 1] = 1
x[x < 0] = 0
image = cv2.cvtColor(x, cv2.COLOR_HSV2RGB) # numpy array, 0 to 1
image = Image.fromarray((image * 255).astype(np.uint8))
# 将图片进行放置,分别对应四张分割图片的位置
dx = self.place_x[index]
dy = self.place_y[index]
new_image = Image.new('RGB', (self.w, self.h), (128, 128, 128))
new_image.paste(image, (dx, dy))
image_data = np.array(new_image) / 255
if self.visual:
image_ = np.array(image_data * 255., dtype=np.uint8)
# print(np.shape(image_))
image_ = cv2.cvtColor(image_, cv2.COLOR_RGB2BGR)
cv2.imwrite( 'Image.jpg', image_)
cv2.waitKey(100)
index = index + 1
box_data = []
# 对box进行重新处理
if len(box) > 0:
np.random.shuffle(box)
box[:, [0, 2]] = box[:, [0, 2]] * nw / iw + dx
box[:, [1, 3]] = box[:, [1, 3]] * nh / ih + dy
box[:, 0:2][box[:, 0:2] < 0] = 0
box[:, 2][box[:, 2] > self.w] = self.w
box[:, 3][box[:, 3] > self.h] = self.h
box_w = box[:, 2] - box[:, 0]
box_h = box[:, 3] - box[:, 1]
box = box[np.logical_and(box_w > 1, box_h > 1)]
box_data = np.zeros((len(box), 5))
box_data[:len(box)] = box
image_datas.append(image_data)
box_datas.append(box_data)
# 将图片分割,放在一起
cutx = np.random.randint(int(self.w * self.min_offset_x), int(self.w * (1 - self.min_offset_x)))
cuty = np.random.randint(int(self.h * self.min_offset_y), int(self.h * (1 - self.min_offset_y)))
new_image = np.zeros([self.h, self.w, 3])
cuty)
new_image[:cuty, :cutx, :] = image_datas[0][:cuty, :cutx, :]
new_image[cuty:, :cutx, :] = image_datas[1][cuty:, :cutx, :]
new_image[cuty:, cutx:, :] = image_datas[2][cuty:, cutx:, :]
new_image[:cuty, cutx:, :] = image_datas[3][:cuty, cutx:, :]
# 对框进行进一步的处理
new_boxes = merge_bboxes(box_datas, cutx, cuty)
# 将box进行调整
box_data = np.zeros((self.max_boxes, 5))
if len(new_boxes) > 0:
if len(new_boxes) > self.max_boxes: new_boxes = new_boxes[:self.max_boxes]
box_data[:len(new_boxes)] = new_boxes
if self.visual:
# print(new_image.shape, np.max(new_image), np.min(new_image))
new_image = np.array(new_image * 255., dtype=np.uint8)
# print(new_image.shape, np.max(new_image), np.min(new_image))
for box in box_data:
box = [int(b) for b in box]
cv2.rectangle(new_image, (box[0], box[1]), (box[2], box[3]), color=(255, 255, 255), thickness=1)
new_image = cv2.cvtColor(new_image, cv2.COLOR_RGB2BGR)
cv2.imwrite('output_Image.jpg', new_image)
cv2.waitKey(1000)
return new_image, box_data
def get_dataset(img_dir,anno_dir):
img_paths = []
annos = []
for anno_file in glob.glob(os.path.join(anno_dir, '*.xml')):
anno_id = anno_file.split('/')[-1].split('x')[0]
img_path = os.path.join(img_dir, f'{anno_id}jpg')
img = cv2.imread(img_path)
img_height, img_width, _ = img.shape
del img
tree = etree.parse(anno_file)
root = tree.getroot()
objectes = root.findall('.//object')
bnd_box = []
for object in objectes:
name = object.find("name").text
category_id = 1
bndbox = object.find("bndbox")
xmin = float(bndbox.find("xmin").text)
xmax = float(bndbox.find("xmax").text)
ymin = float(bndbox.find("ymin").text)
ymax = float(bndbox.find("ymax").text)
bnd_box.append([xmin, ymin, xmax, ymax, category_id])
bnd_box.append(img_path)
annos.append(bnd_box)
return annos
if __name__ == "__main__":
img_dir = '../../dataset/wind_turbine/Images'
img_anno = '../../dataset/wind_turbine/Annotations'
annotation_lines = get_dataset(img_dir, img_anno)
# print(len(annotation_lines))
four_annotation_lines = []
for i, line in enumerate(annotation_lines):
four_annotation_lines.append(line)
if (i+1) % 4==0:
set_trace()
mosaic_aug = Data_augmentation_with_Mosaic(four_annotation_lines,
input_shape=(1024, 1024),
max_boxes=100,
hue=.1,
sat=1.5,
val=1.5,
visual=True)
image_data, box_data = mosaic_aug.main()
for box in box_data:
box = [int(b) for b in box]
cv2.rectangle(image_data, (box[0], box[1]), (box[2], box[3]), color=(255, 255, 255), thickness=1)
cv2.imwrite(str(i)+'.jpg', image_data)
four_annotation_lines = []
效果如下:
截取的区域并没有完全把输出大小图片填满,多余留成灰白
第三种mosaic方式:
from torch.utils.data import DataLoader
from PIL import Image
from torch.utils.data import Dataset
from torchvision import ops
import torchvision.transforms as tsf
import numpy as np
import torch
import random
from ipdb import set_trace
import tqdm
import cv2
def collator(batch):
imgs = [img[0].unsqueeze(0) for img in batch]
annos = [anno[1] for anno in batch]
imgs = torch.cat(imgs)
return imgs, annos
#batch调用数据,输出图片和标签,可尝试替换成其他方式或修改获取数据方式采用这种
class YOLODataset(Dataset):
"""
yolo_line: img_path xmin,ymin,xmax,ymax,label xmin,ymin,...
output_size: int for square output
: probability
color_jitter: transforms.ColorJitter(brightness, contrast, saturation, hue)
"""
def __init__(
self,
yolo_line_list,
output_size = (1024,1024),
batch_size = 4,
normalization:list = None,
resize_mode = 'stretch',
grayscale = False,
size_augmentation:float = None,
center_crop_ratio:tuple = None,
random_flip = None,
color_jitter = None,
mosaic = False
):
self.data = yolo_line_list
self.size = output_size
self.grayscale = grayscale
self.crop_r = center_crop_ratio
self.resize_mode = resize_mode
self.size_aug = size_augmentation
self.random_flip = random_flip
self.color_jitter = color_jitter
self.normalization = normalization
self.mosaic = mosaic
self.batch_size = batch_size
self.counter = 0 # for counting a batch
self.sign = None # for size augmentation
def decode_line(self, yolo_line):
yolo_line = yolo_line.split()
yolo_line[1:] = [s.split(',') for s in yolo_line[1:]]
return yolo_line
def normalize_bbox(self, tensor_bboxes, size):
w, h = size
tensor_bboxes[:,[0,2]] = tensor_bboxes[:,[0,2]] / w
tensor_bboxes[:,[1,3]] = tensor_bboxes[:,[1,3]] / h
return tensor_bboxes
def center_crop(self, ratio:tuple, tensor_img, tensor_bboxes, rm_thres=16):
"""
tensor_bboxes: [left, top, right, bottom]
"""
_, h, w = tensor_img.size()
r = ratio[0] / ratio[1]
size = (int(min(w/r, h)), int(min(h*r, w))) # (h, w)
# img
tensor_img = tsf.CenterCrop(size)(tensor_img)
# align offset bbox
x_offset, y_offset = (w-size[1])/2, (h-size[0])/2
offsets = torch.Tensor([x_offset, y_offset, x_offset, y_offset])
if len(tensor_bboxes):
tensor_bboxes[:,[0,1,2,3]] = tensor_bboxes[:,[0,1,2,3]] - offsets
# align bboxes out of the image
tensor_bboxes[:,0][tensor_bboxes[:,0] < 0] = 0 # left side
tensor_bboxes[:,1][tensor_bboxes[:,1] < 0] = 0 # top side
tensor_bboxes[:,2][tensor_bboxes[:,2] > size[1]] = size[1] # right side
tensor_bboxes[:,3][tensor_bboxes[:,3] > size[0]] = size[0] # bottom side
# remove bboxes out of the image
keep_x = tensor_bboxes[:,2] - tensor_bboxes[:,0] > rm_thres
keep_y = tensor_bboxes[:,3] - tensor_bboxes[:,1] > rm_thres
keep_mask = torch.logical_and(keep_x, keep_y)
tensor_bboxes = tensor_bboxes[keep_mask]
return tensor_img, tensor_bboxes
def resize(self, size:tuple, tensor_img, tensor_bboxes, mode='stretch'):
"""
size: tuple in (w, h)
"""
assert mode in ['stretch', 'pad']
_, h, w = tensor_img.size()
if mode=='stretch' and len(tensor_bboxes):
# bbox size and size align
tensor_bboxes[:,[0,2]] = tensor_bboxes[:,[0,2]]*size[0] / w # x resize
tensor_bboxes[:,[1,3]] = tensor_bboxes[:,[1,3]]*size[1] / h # y resize
elif mode == 'pad':
ratio = min(size[0]/w, size[1]/h)
# pad img
pads = (int(size[0]/ratio-w)//2, int(size[1]/ratio-h)//2) # (w, h)
tensor_img = tsf.Pad(pads)(tensor_img)
if len(tensor_bboxes):
# bbox center align
tensor_bboxes[:,0] = tensor_bboxes[:,0] + pads[0]
tensor_bboxes[:,1] = tensor_bboxes[:,1] + pads[1]
# bbox size align
tensor_bboxes[:,[0,2]] = tensor_bboxes[:,[0,2]]*ratio # x resize
tensor_bboxes[:,[1,3]] = tensor_bboxes[:,[1,3]]*ratio # y resize
# resize img
tensor_img = tsf.Resize((size[1],size[0]))(tensor_img) # (h, w)
return tensor_img, tensor_bboxes
def flip_randomly(self, tensor_img, tensor_bboxes, mode='all'):
_, h, w = tensor_img.size()
assert mode in ['all', 'horizontal', 'vertical']
# horizontal 0.5
if mode in ['all', 'horizontal']:
if random.getrandbits(1):
tensor_img = tsf.RandomHorizontalFlip(1)(tensor_img)
# bbox center align
if len(tensor_bboxes):
tensor_bboxes[:,0] = w - tensor_bboxes[:,0]
# vertical 0.5
if mode in ['all', 'vertical']:
if random.getrandbits(1):
tensor_img = tsf.RandomVerticalFlip(1)(tensor_img)
# bbox center align
if len(tensor_bboxes):
tensor_bboxes[:,1] = h - tensor_bboxes[:,1]
return tensor_img, tensor_bboxes
def get_mosaic(self, imgs:list, bboxes:list, rm_thres=16):
"""
Every image size shold be same.
imgs: list of 4 PIL images
bboxes: list of 4 bbox list
rm_thres: threshold for removing too small size bboxes
"""
# get longest edges as size of new image
new_size = imgs[0].size
rs = np.random.uniform(0.5, 1.5, [2]) # random shift
center = (int(new_size[0]*rs[0]/2), int(new_size[1]*rs[1]/2))
# crop each image
imgs[1] = imgs[1].crop((center[0], 0, new_size[0], center[1]))
imgs[2] = imgs[2].crop((0, center[1], center[0], new_size[1]))
imgs[3] = imgs[3].crop((center[0], center[1], new_size[0], new_size[1]))
# paste other image to main image
imgs[0].paste(imgs[1], (center[0],0))
imgs[0].paste(imgs[2], (0,center[1]))
imgs[0].paste(imgs[3], (center[0],center[1]))
# align bboxes
b0 = np.array(bboxes[0])
b1 = np.array(bboxes[1])
b2 = np.array(bboxes[2])
b3 = np.array(bboxes[3])
box_list = list()
# bbox 0
if b0.any():
b0[:,0][b0[:,0] > center[0]] = center[0]
b0[:,2][b0[:,2] > center[0]] = center[0]
b0[:,1][b0[:,1] > center[1]] = center[1]
b0[:,3][b0[:,3] > center[1]] = center[1]
box_list.append(b0)
# bbox 1
if b1.any():
b1[:,0][b1[:,0] < center[0]] = center[0]
b1[:,2][b1[:,2] < center[0]] = center[0]
b1[:,1][b1[:,1] > center[1]] = center[1]
b1[:,3][b1[:,3] > center[1]] = center[1]
box_list.append(b1)
# bbox 2
if b2.any():
b2[:,0][b2[:,0] > center[0]] = center[0]
b2[:,2][b2[:,2] > center[0]] = center[0]
b2[:,1][b2[:,1] < center[1]] = center[1]
b2[:,3][b2[:,3] < center[1]] = center[1]
box_list.append(b2)
# bbox 3
if b3.any():
b3[:,0][b3[:,0] < center[0]] = center[0]
b3[:,2][b3[:,2] < center[0]] = center[0]
b3[:,1][b3[:,1] < center[1]] = center[1]
b3[:,3][b3[:,3] < center[1]] = center[1]
box_list.append(b3)
if box_list:
mosaic_bboxes = np.concatenate(box_list)
# remove no area bbox
keep_x = mosaic_bboxes[:,2] - mosaic_bboxes[:,0] > rm_thres
keep_y = mosaic_bboxes[:,3] - mosaic_bboxes[:,1] > rm_thres
keep_mask = np.logical_and(keep_x, keep_y)
mosaic_bboxes = mosaic_bboxes[keep_mask]
else:
mosaic_bboxes = list()
return imgs[0], mosaic_bboxes
def __getitem__(self, index:int):
anno = self.decode_line(self.data[index])
img_path = anno[0] # read img
img = Image.open(img_path).convert('RGB') # make sure it is 3 channels
bboxes = [list(map(int,map(float,b))) for b in anno[1:]] # get bboxes
# ------
# Mosaic augmentation
# ------
if self.mosaic:
# randomly get 3 others
lines = random.sample(self.data, 3) # get lines
annos_list = list(map(self.decode_line, lines)) # decode lines
# img1 + other imgs
img_list = [img]
bbox_list = [bboxes]
for anno in annos_list:
img_list.append(Image.open(anno[0]).convert('RGB')) # img
bbox_list.append([list(map(int,map(float,b))) for b in anno[1:]])
# get mosaic from 4 imgs
set_trace()
img, bboxes = self.get_mosaic(img_list, bbox_list, rm_thres=16)
# ------
# To tensor, img grayscale,
# ------
img = tsf.ToTensor()(img) # to tensors
if self.grayscale:
tsf.Grayscale(3)
bboxes = torch.Tensor(bboxes) # to tensors
# ------
# Center Crop by aspect ratio
# ------
if self.crop_r is not None:
img, bboxes = self.center_crop(self.crop_r, img, bboxes)
# ------
# change bbox format
# from (left, top, right, bottom) to (x, y, w, h)
# ------
if len(bboxes):
bboxes[:, :4] = ops.box_convert(bboxes[:,:4], in_fmt='xyxy', out_fmt='cxcywh')
# ------
# Resize an size augmentation
# size augmentation will +- 32 depending the probability
# ------
if self.size_aug is not None:
p = self.size_aug
if self.counter%self.batch_size == 0:
[self.sign] = random.choices([0,1,-1], [1-p,p/2,p/2])
size = torch.Tensor(self.size).long() + self.sign*32
self.counter += 1
else:
size = self.size
img, bboxes = self.resize(size, img, bboxes, self.resize_mode)
# ------
# Flip and color jitter
# ------
if self.random_flip is not None:
img, bboxes = self.flip_randomly(img, bboxes, self.random_flip)
if self.color_jitter is not None:
img = self.color_jitter(img)
# ------
# Normalization
# ------
if self.normalization is not None:
img = tsf.Normalize(*self.normalization)(img)
if len(bboxes):
bboxes = self.normalize_bbox(bboxes, size)
return img, bboxes
def __len__(self):
return len(self.data)
def decode_line(yolo_line):
yolo_line = yolo_line.split()
yolo_line[1:] = [s.split(',') for s in yolo_line[1:]]
return yolo_line
if __name__ == "__main__":
data_dict = "./mosaic_trainval_600.txt"
with open(data_dict) as tf:
yolo_lines = tf.readlines()
np.random.shuffle(yolo_lines)
train_data= YOLODataset(
yolo_lines,
output_size = (1024, 1024),
batch_size = 4,
# normalization:list = None,
resize_mode = 'stretch',
grayscale = False,
random_flip = None,
color_jitter = None,
mosaic = True
)
train_loader = DataLoader(
train_data,
batch_size = 4,
shuffle = True,
collate_fn = collator,
num_workers = 0
)
lines = random.sample(yolo_lines,4) # get lines
annos_list = list(map(decode_line, lines)) # decode lines
# img1 + other imgs
img_list = []
bbox_list = []
for anno in annos_list:
img_list.append(Image.open(anno[0]).convert('RGB')) # img
bbox_list.append([list(map(int,map(float,b))) for b in anno[1:]])
image_data, box_data = train_data.get_mosaic(img_list, bbox_list, rm_thres=16)
mosaic_img = np.array(image_data)
for box in box_data:
box = [int(b) for b in box]
cv2.rectangle(mosaic_img, (box[0], box[1]), (box[2], box[3]), color=(0, 255, 255), thickness=1)
cv2.imwrite('output_mosaic.jpg', mosaic_img)
数据集格式如图所示:

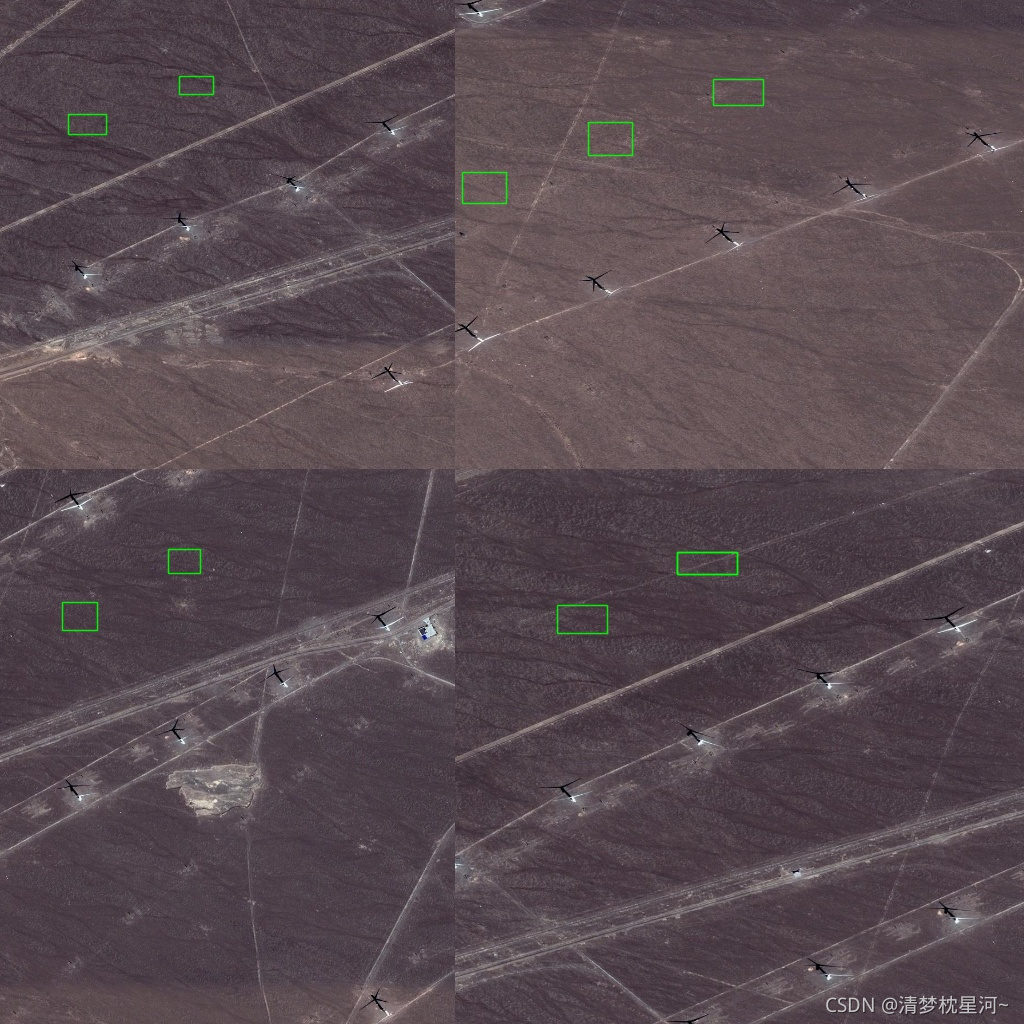
效果:
将设定输出大小的图片范围都用放缩或裁剪后的图片组合填满

问题:
对于以上三种方式,存在一个相同的问题,有点不明原因,当输入图片使用1024x1024大小时,生成的mosaic图片与标签对应不上,而使用其他尺寸的输入图片可以达到以上效果:



















 1172
1172

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











