







目录
三种定时器的区别
STM32F1xx系列总共有 八个定时器
两个高级定时器 + 四个通用定时器 + 两个基本定时器

通用定时器的特点描述
1.位于ABP1低速总线上
2.16位向下,向上/向下(中心对齐模式)计数模式,自动重装载计数器(TIMx_CNT)
3.16位可编程(可以实现修改)预分频器(TIMx_PSC),计数器时钟频率的分频系数为1~65535任意数值
4.四个独立通道(TIMx_CH1~4),通道用来支持:
①输入捕获
②输出比较
③PWM生成
④单脉冲模式输出
5.可使用外部信号(TIM_ETR)控制定时器和定时器互连的同步电路。
AHB系统总线是72M的,桥接出来的APB2也是72M的,APB1有个二分频,所以是36M,是低速的时钟。

定时器中断/事件产生 : (六个独立的IRQ/DMA 请求生成器)
①更新: 计数器向上/向下溢出,计数器初始化(软件或者外部/内部触发)
②触发事件:计数器的启动,停止,初始化或者由内部/外部触发计数
③输入捕获
④输出比较
⑤支持针对定位的增量编码器和霍尔传感器电路
⑥触发输入作为外部时钟或者按周期的电流管理
STM32通用定时器 可以被用于:测量输入信号的脉冲长度(输入捕获),或者产生输入波形(输出比较和PWM)等。
定时器的预分频器和RCC时钟控制预分频器,脉冲长度和波形周期可以在us到ms之间调整,每个通用定时器都是完全独立,没有互相共享任何内存。
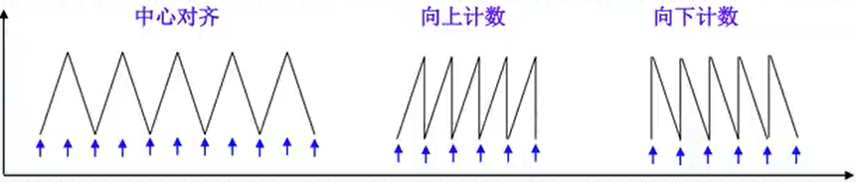
计数器模式
STM32通用定时器 可以向上,向下,向上/向下双向计数模式
① 向上计数模式:计数值从0 计数到自动加载值(TIM_ARR),产生一个计数溢出事件,然后重新从0开始计数
②向下计数模式:计数器从自动装入的值(TIM_ARR)开始向下计数到0,产生一个计数溢出事件,然后从计数装入值重新开始。
③中央对齐模式:计数器从0开始到(自动装入值-1),产生计数溢出事件,然后向下计数到1,产生定时器溢出事件,然后从0开始计数。
通用定时器工作过程
1.时钟部分(时钟来源)
①内部时钟APB1倍频器
②外部引脚(通用定时器2,3,4)
③其他定时器
④外部通道
2.时基单元
①预分频(除法)
②计数器时钟
③自动重装载值
3.输入部分
①输入引脚
②边沿检测
4.输出部分
①输出比较寄存器
周期—重装载值
占空比—比较值

计数器时钟计算方法

CK_INT是定时器时钟,APB1到CK_INT会 乘于1或者除于2
为什么要 乘于1或者除于2?

除非APB1分频系数为1,否则通用定时器时钟为PAB1的两倍
举例:
AHB= 72M
APB1=36M (分频系数为2)
通用定时器时钟为 36 x2= 72M
CK_PSC:预分频器时钟的频率

CK_PSC分频多少就除于N,就可以得到CK_CNT(计数器的频率)
定时器相关寄存器
1.计数器寄存器CNT : 当前计数值
2.预分频寄存器 : 分频系数 (PSC+1) / N = CNT
3.自动重装载寄存器: 重装载值
4.控制寄存器: 控制计数方向
定时器库函数结构体
常用的是前四个成员,后面一个用于高级定时器
typedef struct
{
uint16_t TIM_Prescaler; //初始化预分频值
uint16_t TIM_Period; //设定自动装载值
uint16_t TIM_CounterMode; //设定计数模式
uint16_t TIM_ClockDivision; //输入捕获使用
uint8_t TIM_RepetitionCounter; //高级定时器使用
} TIM_TimeBaseInitTypeDef;
定时器库函数结构体
void TIM_TimeBaseInit 定时器初始化
(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
void TIM_Cmd 定时器使能
(TIM_TypeDef* TIMx, FunctionalState NewState);
FlagStatus TIM_GetFlagStatus 定时器状态标志位
(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
void TIM_ClearFlag 定时器清楚标志位
(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
ITStatus TIM_GetITStatus 定时器中断标志位
(TIM_TypeDef* TIMx, uint16_t TIM_IT);
void TIM_ClearITPendingBit 定时器清楚中断标志位
(TIM_TypeDef* TIMx, uint16_t TIM_IT);
定时器总断配置过程
1.使能时钟 定时器时钟
2. 配置定时器结构体 ,
3.开启定时器中断,配置中断结构体
4.中断服务函数
定时器配置LED每秒闪烁一次
Tout = [ 重装载值(ARR+1) * 分频系数(PSC+1)] /Tclk(定时器的时钟)
Tout = 100000(9999+1) *7200(分频系数 7199+1) /72M(72 000 000)
通过定时器让LED灯间隔1s闪烁
led.h
#include "stm32f10x.h"
void Led_init(void);
led.c
#include "stm32f10x.h"
#include "led.h"
void Led_init(void)
{
GPIO_InitTypeDef Led_init;
//1.ʹÄÜAPB2µÄʱÖÓGPIO
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
//2.½á¹¹ÌåÅäÖÃ
Led_init.GPIO_Mode = GPIO_Mode_Out_PP;
Led_init.GPIO_Pin = GPIO_Pin_13;
Led_init.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOC, &Led_init);
}
tim.h
#include "stm32f10x.h"
void tim_Init(void);
tim.c
#include "stm32f10x.h"
#include "tim.h"
/*
1.ʹÄÜʱÖÓ£¬¶¨Ê±Æ÷ʱÖÓ
2.ÅäÖö¨Ê±Æ÷½á¹¹Ìå
3.¿ªÆô¶¨Ê±Æ÷Öжϣ¬ÅäÖÃÖжϽṹÌå
*/
void tim_Init(void)
{
TIM_TimeBaseInitTypeDef timInitStruct;
NVIC_InitTypeDef nvicInitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
timInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
timInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
timInitStruct.TIM_Period = 10000 - 1;
timInitStruct.TIM_Prescaler = 7200 - 1;
TIM_TimeBaseInit(TIM2,&timInitStruct);
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);
TIM_Cmd(TIM2,ENABLE);
nvicInitStruct.NVIC_IRQChannel = TIM2_IRQn;
nvicInitStruct.NVIC_IRQChannelPreemptionPriority = 1;
nvicInitStruct.NVIC_IRQChannelSubPriority = 1;
nvicInitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&nvicInitStruct);
}
main.c
#include "stm32f10x.h"
#include "led.h"
#include "relay.h"
#include "shake.h"
#include "exti.h"
#include "usart.h"
#include "stdio.h"
#include "tim.h"
void delay(uint16_t time)
{
uint16_t i =0;
while(time--){
i=12000;
while(i--);
}
}
int main()
{
Led_init();
Relay_Init();
Shake_init();
exti_init();
usart_init();
tim_Init();
//³õʼ»¯Òý½Å
GPIO_SetBits(GPIOA, GPIO_Pin_3);
GPIO_SetBits(GPIOC, GPIO_Pin_13);
// while(1)
// {
// usartSendStr(USART1,"°ÂÀï¸ø\r\n");
// int i = printf("Finny\r\n");
// printf("%d\r\n",i);
// putchar('2');
// delay(1000);
// }
}
//ÍⲿÖжÏ
//void EXTI1_IRQHandler(void)
//{
// if (EXTI_GetITStatus( EXTI_Line1 ) != RESET){// ÅжÏÊÇ·ñ·¢ÉúÖжÏ
// GPIO_ResetBits(GPIOA, GPIO_Pin_3);
// usartSendStr(USART1,"Open light success\r\n");
// delay(1000);
// GPIO_SetBits(GPIOA, GPIO_Pin_3);
// usartSendStr(USART1,"Close light success\r\n");
// }
// EXTI_ClearFlag(EXTI_Line1);
//
//}
//´®¿ÚÖжÏ
//void USART1_IRQHandler(void)
//{
// char temp;
//
// if(USART_GetITStatus(USART1,USART_IT_RXNE) != RESET){
//
// temp = USART_ReceiveData(USART1);
// if(temp == 'o'){
// GPIO_ResetBits(GPIOC, GPIO_Pin_13);
// usartSendStr(USART1,"Open LED light success\r\n");
// }
//
// if(temp == 'c'){
// GPIO_SetBits(GPIOC, GPIO_Pin_13);
// usartSendStr(USART1,"Close LED light success\r\n");
// }
//
// }
//}
//¶¨Ê±Æ÷ÖжÏ
void TIM2_IRQHandler(void)
{
static uint16_t temp;
if(TIM_GetITStatus(TIM2,TIM_IT_Update) != RESET)
{
if(temp++ %2 == 1){
GPIO_ResetBits(GPIOC, GPIO_Pin_13);
}else{
GPIO_SetBits(GPIOC, GPIO_Pin_13);
}
}
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
}
















 318
318











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











