







早期的目标检测算法,无论是一步式的,还是两步式的,通常都是在Backbone的最后一个stage(特征图分辨率相同的所有卷积层归类为一个stage)最后一层的特征图,直接外接检测头做目标检测。此种目标检测算法,可以称之为单stage目标检测算法。
由于单stage目标检测算法中,Backbone的最后一个stage的stride通常是32,导致输出的特征图分辨率是输入图片分辨率的1/32,太小,不利于物体检测,因此单stage的目标检测算法,一般会将最后一个stage的MaxPooling去掉或者将stride为2的conv改为stride为1的conv,以增大最后一个分辨率。
后来研究发现,单stage目标检测算法中,无法用单一stage的特征图同时有效的表征各个尺度的物体,因此,后来目标检测算法,就逐渐发展为利用不同stage的特征图,形成特征金字塔网络(feature parymid network),表征不同scale的物体,然后再基于特征金字塔做物体检测,也就是进入了FPN时代。
本文将认真梳理目标检测中常用的各种FPN。
目标检测各个阶段
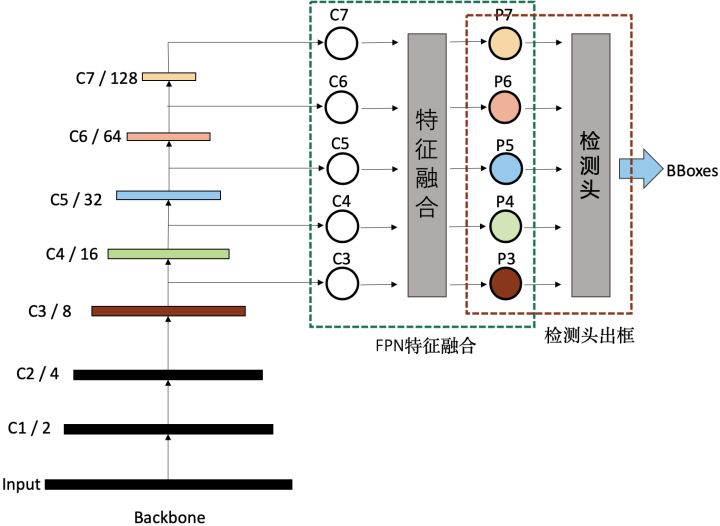
如上图,我们常见的目标检测算法,其实可以分解为三个递进的阶段:
1)Backbone生成特征阶段
计算机视觉任务一般都是基于常用预训练的Backbone,生成抽象的语义特征,再进行特定任务微调。物体检测也是如此。
Backbone生成的特征,一般按stage划分,分别记作C1、C2、C3、C4、C5、C6、C7等,其中的数字与stage的编号相同,代表的是分辨率减半的次数,如C2代表stage2输出的特征图,分辨率为输入图片的1/4,C5代表,stage5输出的特征图,分辨率为输入图片的1/32。
2)特征融合阶段
这个是FPN特有的阶段,FPN一般将上一步生成的不同分辨率特征作为输入,输出经过融合后的特征。输出的特征一般以P作为编号标记。如FPN的输入是,C2、C3、C4、C5、C6,经过融合后,输出为P2、P3、P4、P5、P6
3)检测头输出bounding box
FPN输出融合后的特征后,就可以输入到检测头做具体的物体检测。
物体检测性能提升,一般主要通过数据增强、改进Backbone、改进FPN、改进检测头、改进loss、改进后处理等6个常用手段。
其中FPN自从被提出来,先后迭代了不少版本。大致迭代路径如下图:
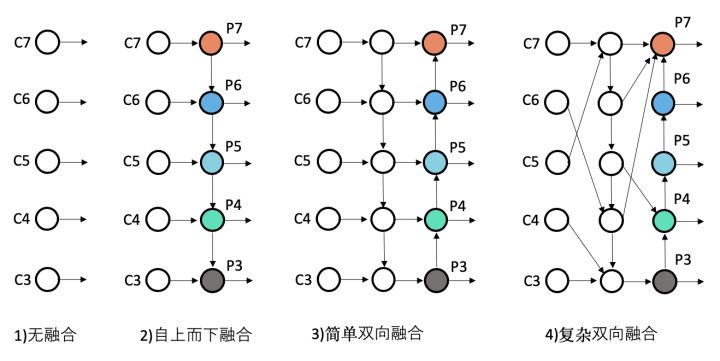
1)无融合
无融合,又利用多尺度特征的典型代表就是2016年鼎鼎有名的SSD,它直接利用不同stage的特征图分别负责不同scale大小物体的检测。

2)自上而下单向融合
自上而下单向融合的FPN,事实上仍然是当前物体检测模型的主流融合模式。如我们常见的Faster RCNN、Mask RCNN、Yolov3、RetinaNet、Cascade RCNN等,具体各个FPN的内部细节如下图。
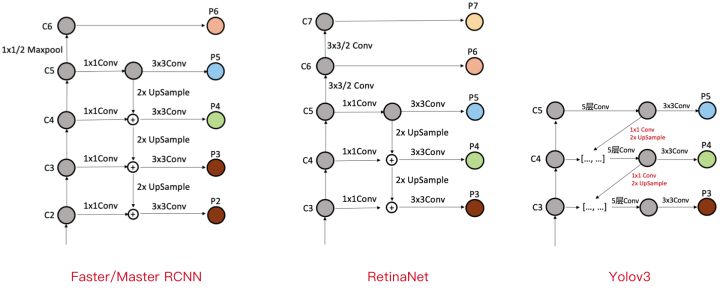
a)Faster/Master/Cascade RCNN中的FPN
Faster/Master/Cascade RCNN中的FPN,利用了C2-C6五个stage的特征,其中C6是从C5直接施加1x1/2的MaxPooling操作得到。FPN融合后得到P2-P6,其中P6直接等于C6,P5是先经过1x1Conv,再经过3x3Conv得到,P2-P4均是先经过1x1Conv,再融合上一层2xUpsample的特征,再经过3x3Conv得到。具体过程可以看上图。
b)RetinaNet中的FPN
RetinaNet中的FPN,利用了C3-C7五个stage的特征,其中C6是从C5直接施加3x3/2的Conv操作得到,C7是从C6直接施加3x3/2的Conv操作得到。FPN融合后得到P3-P7,其中P6、P7直接等于C6、C7,P5是先经过1x1Conv,再经过3x3Conv得到,P3-P4均是先经过1x1Conv,再融合上一层2xUpsample的特征,再经过3x3Conv得到。具体过程可以看上图。
可以看出,RetinaNet基本与Faster/Master/Cascade RCNN中的FPN一脉相承。只是利用的stage的特征略有差别,Faster/Master/Cascade RCNN利用了高分辨率低语义的C2,RetinaNet利用了更低分辨率更高语义的C7。其他都是细微的差别。
c)Yolov3中的FPN
Yolov3中的FPN与上述两个有比较大的区别。首先,Yolov3中的FPN只利用到了C3-C5三个stage的特征;其次,从C5特征到P5特征,会先经过5层Conv,然后再经过一层3x3Conv;最后,C3-C4到P3-P4特征,上一层特征会先经过1x1Conv+2xUpsample,然后先与本层特征concatenate,再经过5层Conv,之后经过一层3x3Conv。
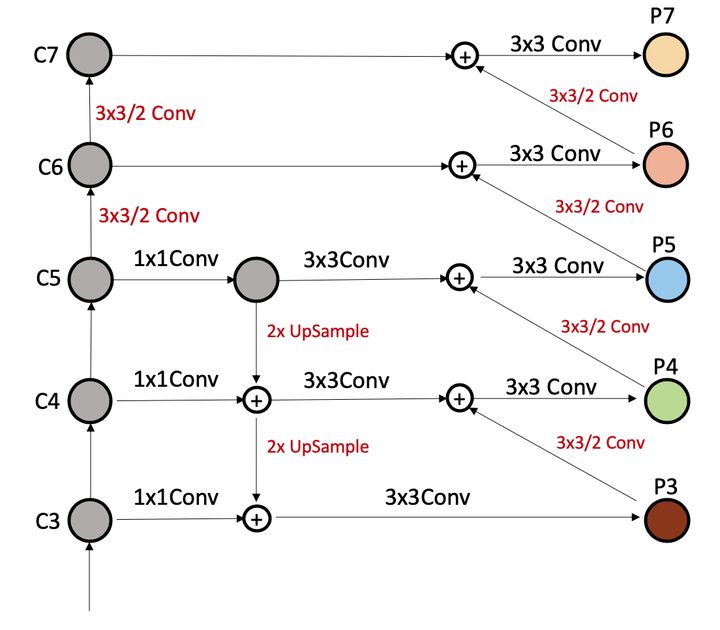
3)简单双向融合
FPN自从提出来以后,均是只有从上向下的融合,PANet是第一个提出从下向上二次融合的模型,并且PANet就是在Faster/Master/Cascade RCNN中的FPN的基础上,简单增了从下而上的融合路径。
4)复杂的双向融合
PANet的提出证明了双向融合的有效性,而PANet的双向融合较为简单,因此不少文章在FPN的方向上更进一步,尝试了更复杂的双向融合,如ASFF、NAS-FPN和BiFPN。
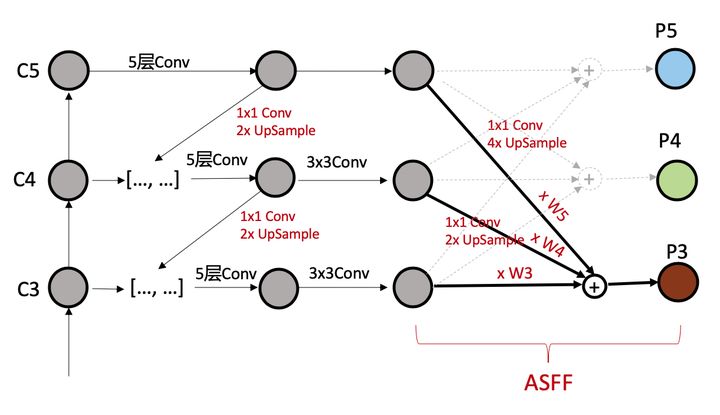
ASFF
ASFF(论文:Learning Spatial Fusion for Single-Shot Object Detection)作者在YOLOV3的FPN的基础上,研究了每一个stage再次融合三个stage特征的效果。如下图。其中不同stage特征的融合,采用了注意力机制,这样就可以控制其他stage对本stage特征的贡献度。
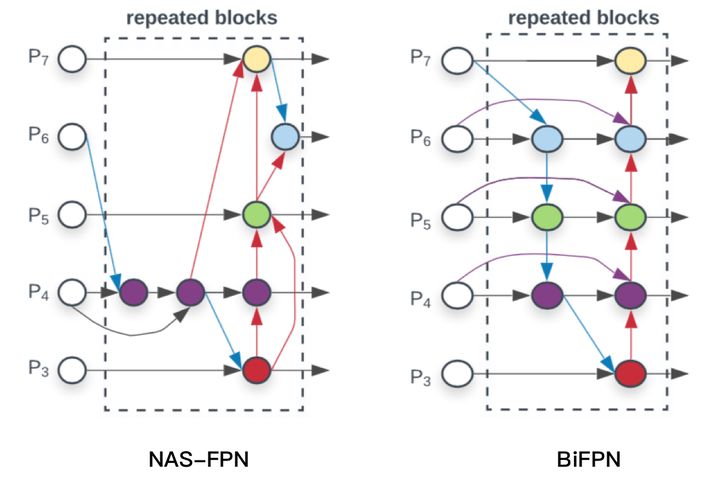
NAS-FPN和BiFPN
NAS-FPN和BiFPN,都是google出品,思路也一脉相承,都是在FPN中寻找一个有效的block,然后重复叠加,这样就可以弹性的控制FPN的大小。
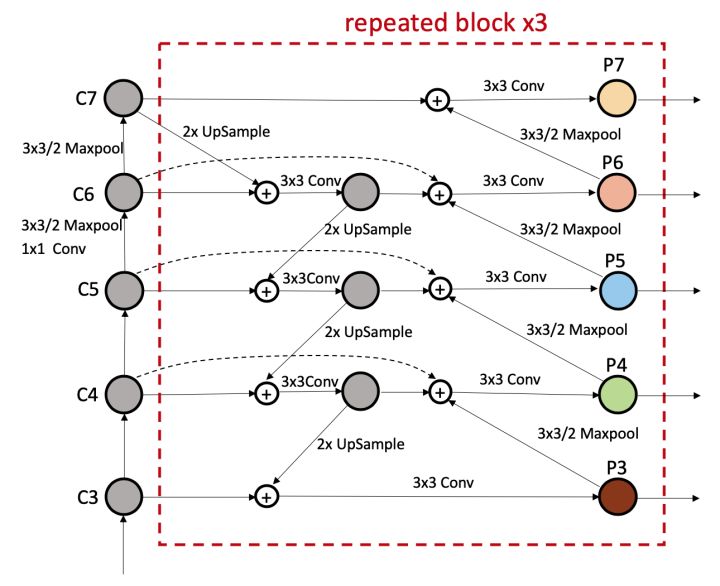
其中BiFPN的具体细节如下图
Recursive-FPN(递归FPN)
将FPN输出做为backbone对应层的特征进行卷积,卷积后的结果输出到FPN,再与上次FPN输出的结果结合。

先正常FPN,再将FPN后的结果加回去


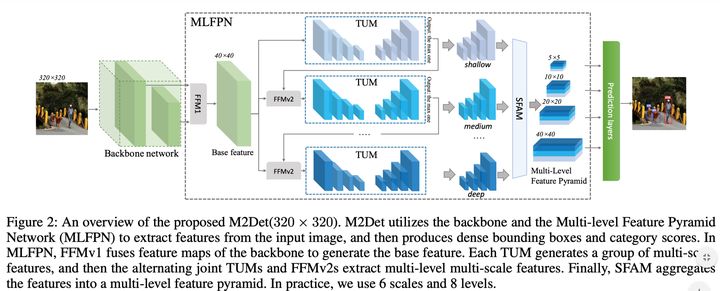
5)M2det中的SFAM
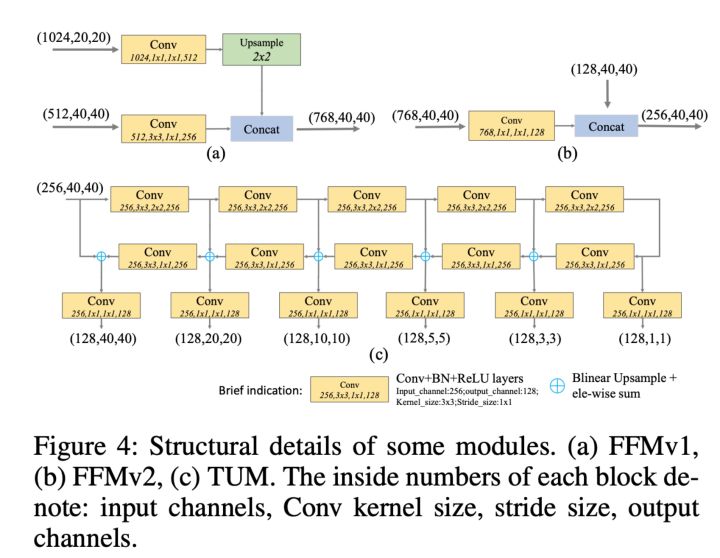
M2det中的SFAM,比较复杂,它是先把C3与C5两个stage的特征融合成一个与C3分辨率相同的特征图(下图中的FFM1模块),然后再在此特征图上叠加多个UNet(下图中的TUM模块),最后将每个UNet生成的多个分辨率中相同分辨率特征一起融合(下图中的SFAM模块),从而生成最终的P3、P4、P5、P6特征,以供检测头使用。具体如下图。
每一个模块的详细细节如下图















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









