






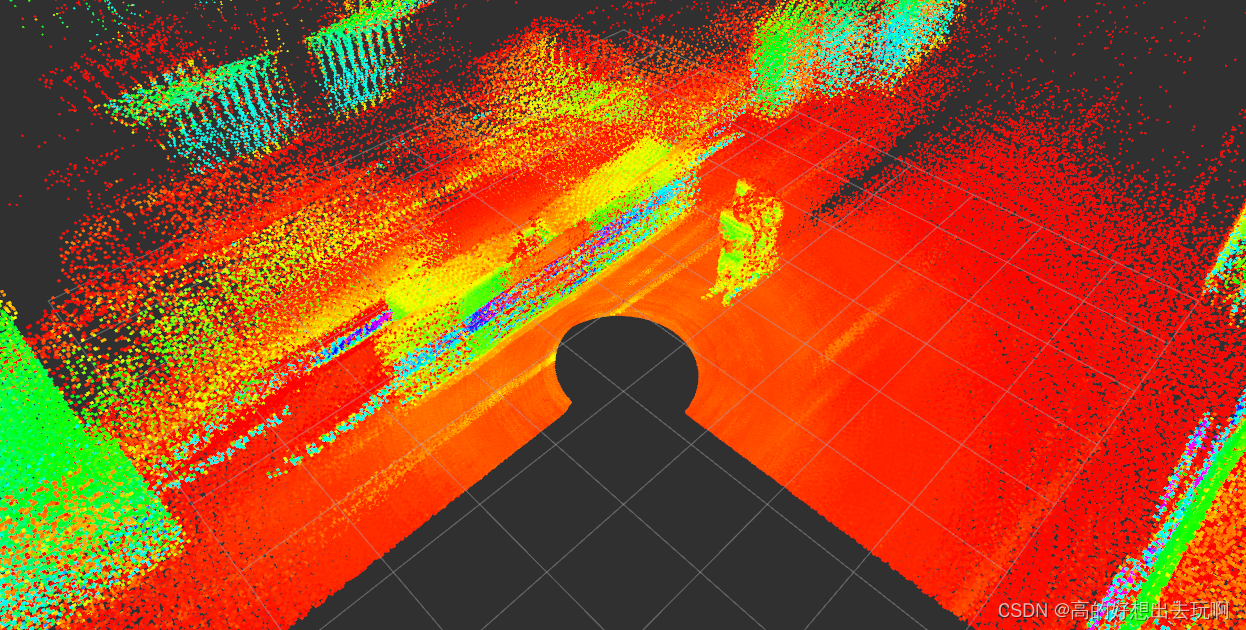
在使用自采数据包放入autoware中的lidar_centerpoint上进行检测时发现,在rviz可视化上出现问题:多帧点云在一个位置上不断叠加,不能正常随时间显示。
如下图所示:
解决方法:
出现上述问题是因为autoware默认使用的是模拟器的时间,在autoware提供的bag中有个topic为/clock,就是模拟器时间,而我们自采数据包里不包含模拟时间,故将模拟时间改为系统时间即可。具体是修改lidar_centerpoint中launch文件中的use_sim_time,将其由true改为false。
重新编译后执行rviz上点云正常显示。















 692
692

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









