









轨道参数
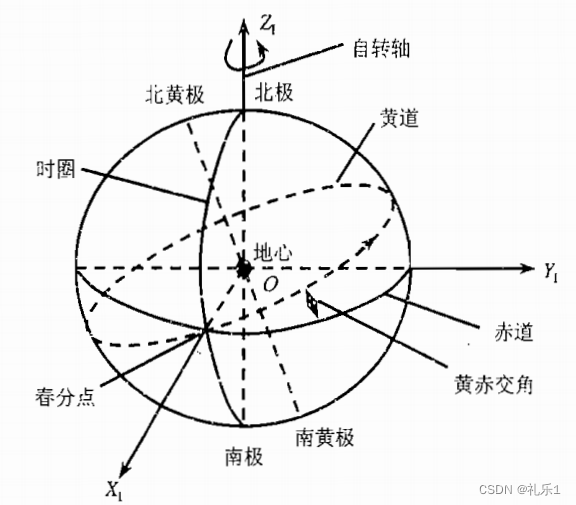
赤道面:与地球自转轴垂直的平面。
赤道:赤道面与地球表面相交的大圆。
黄道:太阳相对于地球做的运动轨迹在地球表面上的投影。
黄赤交角:黄道面与赤道面之间的夹角,大约23.5°
春分点:太阳投影沿黄道由南半球向北半球运动时与赤道的交点。
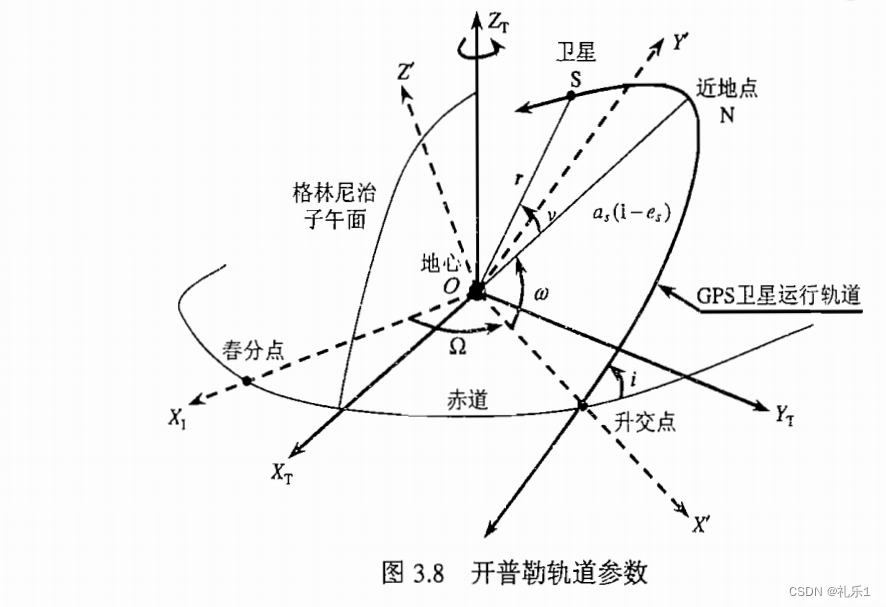
升交点:卫星由南向北运行时其轨道面与地球赤道面的交点
6个参数:轨道升交点赤经
Ω
\Omega
Ω、轨道倾角
i
i
i、近地点角距
ω
\omega
ω、长半径
a
s
a_s
as、偏心率
e
s
e_s
es和卫星真近点角
v
v
v。
轨道升交点赤经
Ω
\Omega
Ω:地球赤道平面上的春分点和升交点对地心
O
O
O的夹角。
轨道倾角
i
i
i:卫星轨道平面与赤道面之间的夹角。
近地点角距
ω
\omega
ω:卫星轨道平面上升交点与近地点之间的地心夹角。
长半径
a
s
a_s
as:椭圆参数
长半径
a
s
a_s
as:椭圆参数
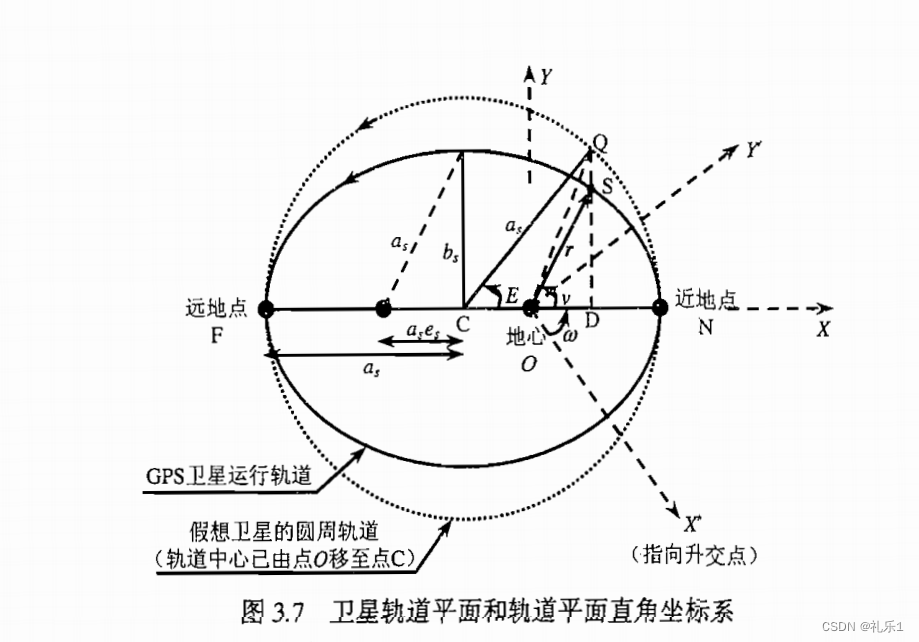
卫星真近点角
v
v
v:卫星在运行轨道上当前位置
S
S
S与近地点
N
N
N之间的地心夹角
1.轨道升交点赤经 Ω \Omega Ω和轨道倾角 i i i确定了卫星运行的轨道平面
2.近地点角距 ω \omega ω进一步确定卫星椭圆轨道在轨道平面中的方位
3.长半径 a s a_s as和长半径 a s a_s as确定了椭圆的大小和方向
4.卫星真近点角 v v v确定卫星相对于地心 O O O的瞬时空间位置
卫星星历和历书参数
在实际中卫星运动将会受到多种因素影响,故实际运动轨迹将偏离无摄运动轨道。
GPS采用了一套拓展后的开普勒轨道参数,共计16个。这套参数被称为星历参数。
多出来的参数用于修正上一结中卫星的轨道参数。具体意义和求解见《GPS原理与接收机设计》3.3-3.6。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









