







一、相关文件
百度网盘提取码:ibcc
内容:
- ros驱动
- 410说明手册
- 组合导航安装及标定说明
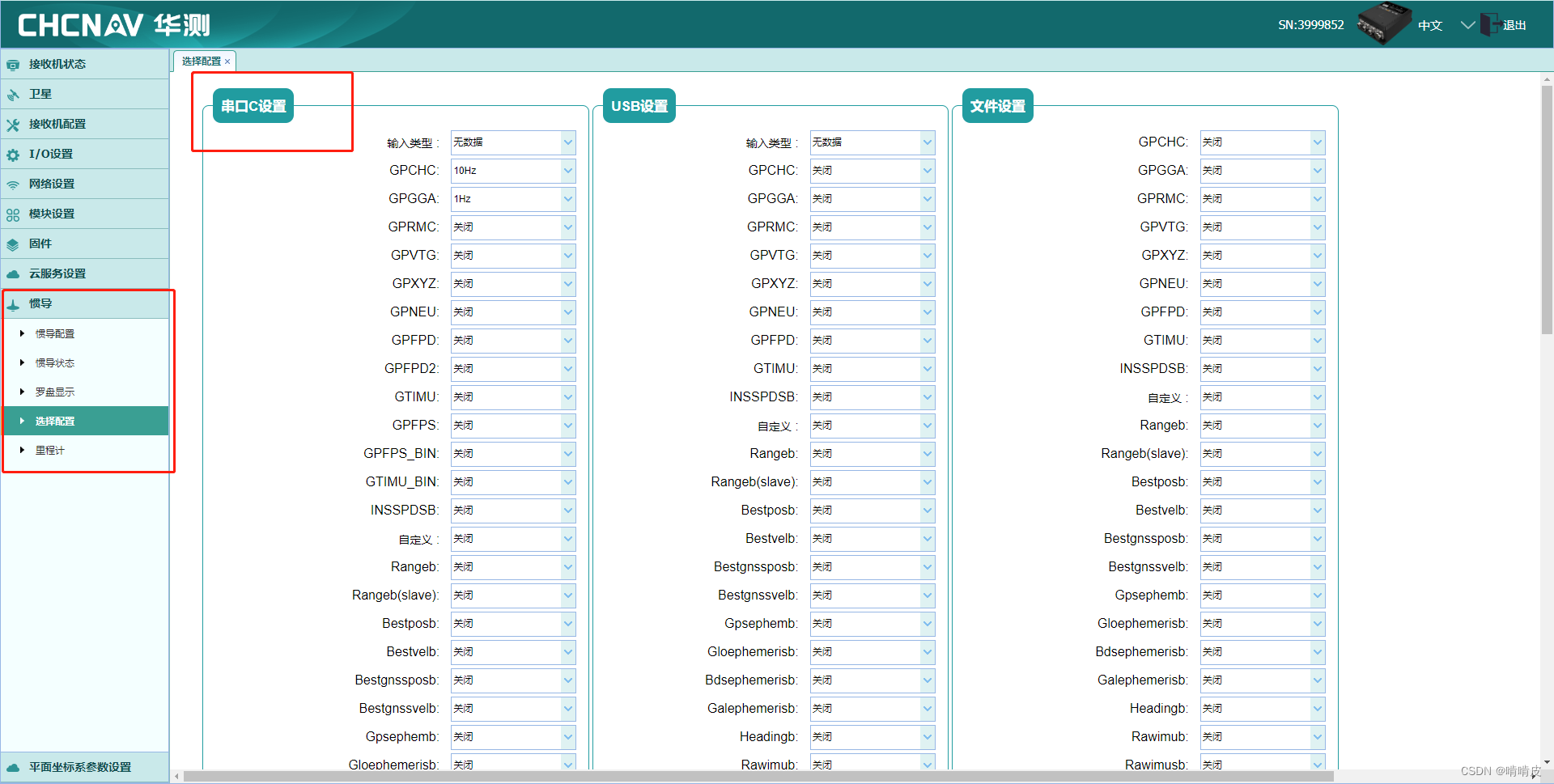
二、网页配置
根据410说明手册,连接WIFI网络:GNSS-XXXXXXX,密码是 12345678。然后打开浏览器,在地址栏
输入 192.168.200.1,弹出登陆界面,账号:admin,密码:password。
具体内容见ROS驱动包/chcnav/doc/README.md
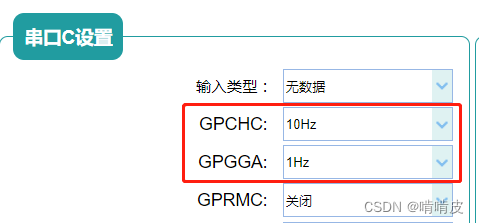
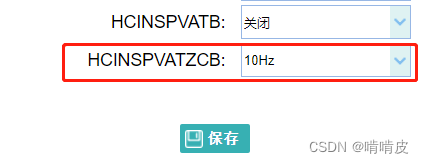
根据相关通讯方式进行配置,如串口,则配置串口C。
三、运行ROS包
source catkin_ws/devel/setup.bash
# 查看当前串口的波特率是否与网页端配置相同
sudo stty -F /dev/ttyUSB0
# 设置当前串口波特率
sudo stty -F /dev/ttyUSB0 460800 #此处的波特率要与网页配置时相同
# 将CGI串口C连接PC并赋访问权限(如果是通过串口解析,需要添加串口访问权限)
sudo chmod 777 /dev/ttyUSB0
# 5.运行demo(选择所需demo运行)
roslaunch chcnav demo_1.launch
四、检测是否能够接受到数据:
source catkin_ws/devel/setup.bash
rostopic echo /chcnav/devpvt
``
```bash
header:
seq: 1620
stamp:
secs: 1681192220
nsecs: 400000095
frame_id: "tcp_7532"
latitude: 31.1595609221
longitude: 121.178326001
altitude: 41.6362113953
position_stdev: [1.1977519989013672, 1.12064790725708, 2.784872531890869]
undulation: 10.6632003784
roll: 2.49328041077
pitch: -1.55978727341
yaw: -105.749206543
euler_stdev: [90.0, 90.0, 290.25628662109375]
speed: 0.00591935124248
heading: 0.0
heading2: 105.749206543
enu_velocity:
x: 0.000335961725796
y: -0.00590980937704
z: -0.0211292114109
enu_velocity_stdev: [0.15023864805698395, 0.15304626524448395, 0.18492937088012695]
vehicle_angular_velocity:
x: 0.318303674459
y: 0.020589446649
z: 0.0847927108407
vehicle_linear_velocity:
x: 0.0
y: 0.0
z: 0.0
vehicle_linear_acceleration:
x: 0.0
y: 0.0
z: 0.0
vehicle_linear_acceleration_without_g:
x: 0.0
y: 0.0
z: 0.0
raw_angular_velocity:
x: 0.318303674459
y: 0.020589446649
z: 0.0847927108407
raw_acceleration:
x: -0.0434497259557
y: -0.0271972920746
z: 0.997847795486
stat: [1, 6]
age: 0.0
ns: 41
ns2: 41
leaps: 18
hdop: 0.595272839069
pdop: 1.18467915058
vdop: 1.02426314354
tdop: 0.719998300076
gdop: 1.38631248474
ins2gnss_vector:
x: 0.0
y: 0.0
z: 0.0
ins2body_angle:
x: 0.0
y: 0.0
z: 0.0
gnss2body_vector:
x: -0.469999998808
y: -5.48000001907
z: -2.75999999046
gnss2body_angle_z: 0.0
warning: 2
sensor_used: 1


















 437
437

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











