






提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
单片机开发场景下经常会应道延时函数,延时函数又分为阻塞式和和非阻塞式,二者的区别我简单理解为:
阻塞式一般用与裸机开发,会导致程序执行暂停一段特定的时间。在这段时间内,程序不会执行任何其他操作,直到延时完成。
非阻塞式延时也称为异步延时,允许程序在等待的同时继续执行其他操作。这种类型的延时函数通常用于多任务或实时系统中,其中程序需要在等待某个事件(如用户输入、数据传输完成等)的同时,继续处理其他任务。
当然延时函数都不可以用在中断里面。
我主要总结一下我遇到过的阻塞式延时函数。
提示:以下是本篇文章正文内容,下面案例可供参考
一、最简单的延时函数
最简单的延时,在学51单片机的时候用的比较多,32里面也可以用,主要是用一个循环来实现,因为每一个指令执行也是需要时间的,时间精度较低。可以根据主频推算时间或者示波器查看延时时间。
这个方法不需要依靠任何外设。
//微秒级的延时 根据mcu主频确定delay_ust
#define delay_ust 50
void delay_us(uint32_t delay_us)
{
volatile unsigned int t ;
for (num = 0; num < delay_us; num++)
{
t = delay_ust ;
while (t--);
}
}
二、查询定时器
我们可以使用定时器,但是不需要使能中断,使用查询的方式去延时,这样既能解决频繁中断问题,又能保证精度。
STM32任何定时器都可以实现,一般用SysTick 定时器
的居多。
SysTick 内部包含了一个 24 位向下计数的计数器。它会根据处理器时钟或一个参考时钟信号(在 ARM Cortex-M3 或 Cortex-M4 计数参考手册中也被称作 STCLK)来递减计数值。当计到0时,将从RELOAD寄存器中自动重装载定时初值。只要不把它在SysTick控制及状态寄存器中的使能位清除,就永不停息。
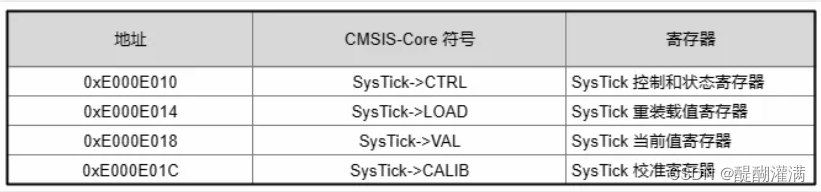
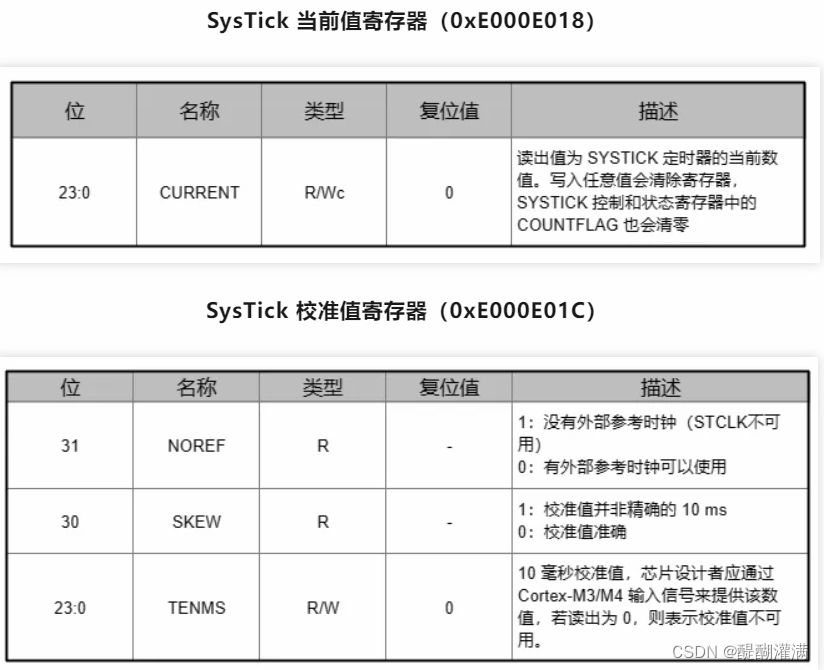
具体寄存器细节如下

代码如下(示例):
static u8 fac_us=0; //us延时倍乘数
void delay_init(u8 SYSCLK)
{
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);
fac_us=SYSCLK/8; //不论是否
}
void delay_us(uint32_t nus)
{
uint32_t temp;
SysTick->LOAD = nus*fac_us; //时间加载 ;
SysTick->VAL=0X00;//清空计数器
SysTick->CTRL=0X01;//使能,减到零是无动作,采用外部时钟源
do
{
temp=SysTick->CTRL;//读取当前倒计数值
}while((temp&0x01)&&(!(temp&(1<<16))));//等待时间到达
SysTick->CTRL=0x00; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
还有一个rtt里面的阻塞式延时也是用的这个方式
static void stm32_udelay(rt_uint32_t us)
{
rt_uint32_t ticks;
rt_uint32_t told, tnow, tcnt = 0;
rt_uint32_t reload = SysTick->LOAD;
ticks = us * reload / (1000000 / RT_TICK_PER_SECOND);
told = SysTick->VAL;
while (1)
{
tnow = SysTick->VAL;
if (tnow != told)
{
if (tnow < told)
{
tcnt += told - tnow;
}
else
{
tcnt += reload - tnow + told;
}
told = tnow;
if (tcnt >= ticks)
{
break;
}
}
}
}
三、定时器中断
定时器具有很高的精度,我们可以配置定时器中断,比如配置1ms中断一次,然后间接判断进入中断的次数达到精确延时的目的。这种方式精度可以得到保证,但是系统一直在中断,不利于在其他中断中调用此延时函数,有些高精度的应用场景不适合,比如其他外设正在输出,不允许任何中断打断的情况。
下面以hal库提供的代码为例:
__weak void HAL_IncTick(void)
{
uwTick += uwTickFreq;// 1
}
rt_tick_t rt_tick_get(void)
{
/* return the global tick */
return rt_tick;
}
uint32_t HAL_GetTick(void)
{
return rt_tick_get() * 1000 / RT_TICK_PER_SECOND;
}
void HAL_Delay(uint32_t Delay)
{
uint32_t tickstart = HAL_GetTick();
uint32_t wait = Delay;
/* Add a freq to guarantee minimum wait */
if (wait < HAL_MAX_DELAY)
{
wait += (uint32_t)(uwTickFreq);
}
while((HAL_GetTick() - tickstart) < wait)
{
}
}
void SysTick_Handler(void)
{
/* enter interrupt */
HAL_IncTick();
}
四、汇编指令
如果系统硬件资源紧张,或者没有额外的定时器提供,又不想方法1的普通延时,可以使用汇编指令的方式进行延时,不会被编译优化且延时准确。
/*!
* @brief 软件延时
* @param ulCount:延时时钟数
* @return none
* @note ulCount每增加1,该函数增加3个时钟
*/
void SysCtlDelay(unsigned long ulCount)
{
__asm(" subs r0, #1\n"
" bne.n SysCtlDelay\n"
" bx lr");
}

















 686
686

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









