







 本文详细介绍了遥感图像的几何处理,包括遥感传感器的构像方程、图像几何变形、几何处理方法以及图像自动配准和数字镶嵌。重点讨论了不同类型的构像方程,图像变形的分类及纠正原理,同时提到了几何纠正的不同方法,如多项式法、共线方程法和有理函数法。此外,还涉及了图像配准的步骤和技术,以及数字图像镶嵌的关键问题和处理策略。
本文详细介绍了遥感图像的几何处理,包括遥感传感器的构像方程、图像几何变形、几何处理方法以及图像自动配准和数字镶嵌。重点讨论了不同类型的构像方程,图像变形的分类及纠正原理,同时提到了几何纠正的不同方法,如多项式法、共线方程法和有理函数法。此外,还涉及了图像配准的步骤和技术,以及数字图像镶嵌的关键问题和处理策略。
目录
遥感图像几何处理
重点:各类传感器的构像方程(物理模型、通用模型),图像的变形情况,图像纠正原理,图像纠正过程。
1.遥感传感器的构像方程
构像方程中的坐标系:
传感器坐标系S-UVW:S为传感器投影中心,作为传感器坐标系的坐标原点,U轴的方向为遥感平台的飞行方向,W轴为传感器指向地底点方向的负方向,V轴垂直于WU平面,该坐标系描述了像点在控件的位置。
地面坐标系O-XYZ:主要采用地心坐标系统。当传感器对地成像时,Z轴与原点处的天顶方向一样,XY平面与Z轴垂直。
图像(像点)坐标系o-xyf:(x,y)为像点在图像上的平面坐标,f为传感器成像时的等效焦距,其方向与S-UVW方向一致。
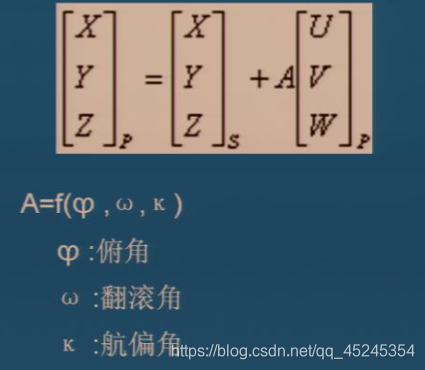
通用构像方程: 指地物点在图像上的图像坐标(x,y)和其在地面对应点的大地坐标(X,Y,Z)之间的关系。设地面点P在地面坐标系中的坐标为(X, Y ,Z)P,P在传感器坐标系中的坐标为(U V W)P,传感器投影中心S在地面坐标系中的坐标为(X Y Z)S,A为传感器坐标相对于地面坐标系统的旋转矩阵,则通用构像方程为:
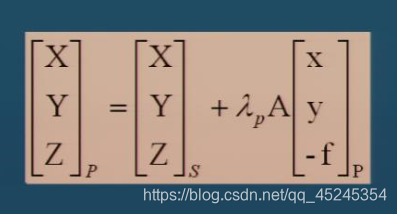
中心投影构像方程:中心投影像点坐标与地面点大地坐标的关系,λp为成像比例尺分母,f为摄影机主距,即构像方程为:
推扫式传感器的构像方程: 推扫式传感器的构像关系,垂直对地成像&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









