







在使用Solidworks进行CAD设计时,往往需要对装配体进行运动学分析,对于一些复杂的装配体,可能需要使用Adoms等更加专业的软件来进行运动学仿真,来得到各个零件运动过程中的参数。但是对于一些简单的设计,使用Adoms就显得有些大材小用,而且会浪费很多的学习成本。值得高兴的是,在Solidworks中就自带干涉检查等操作,可以实现对于零部件的干涉检查。本篇博客是在Solidworks 2016环境下进行的操作,其他版本的操作也大同小异。
在本篇博客当中,Solidworks中的干涉检查分为三种方式,分别为:静态干涉检查、动态干涉检查、运动过程中干涉检查。
一、静态干涉检查——干涉检查
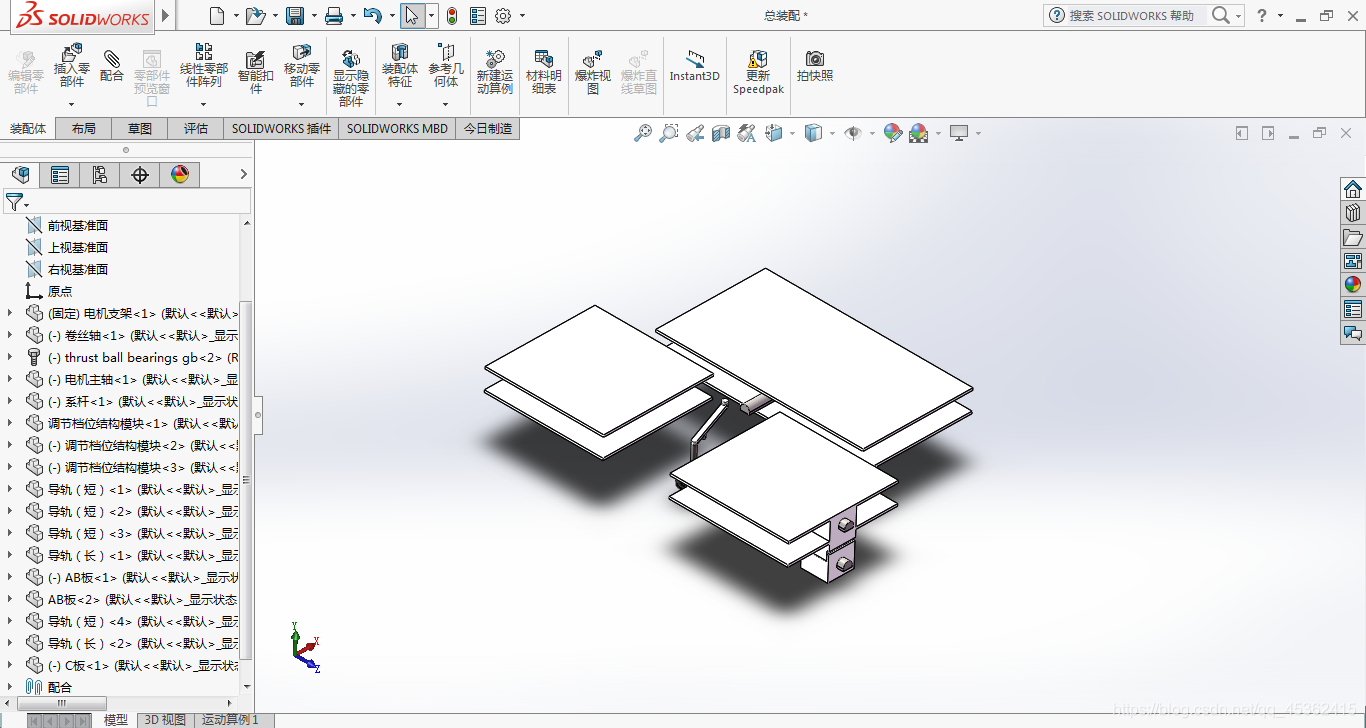
- 首先打开一个装配图并将零件进行适当地装配,如图所示:
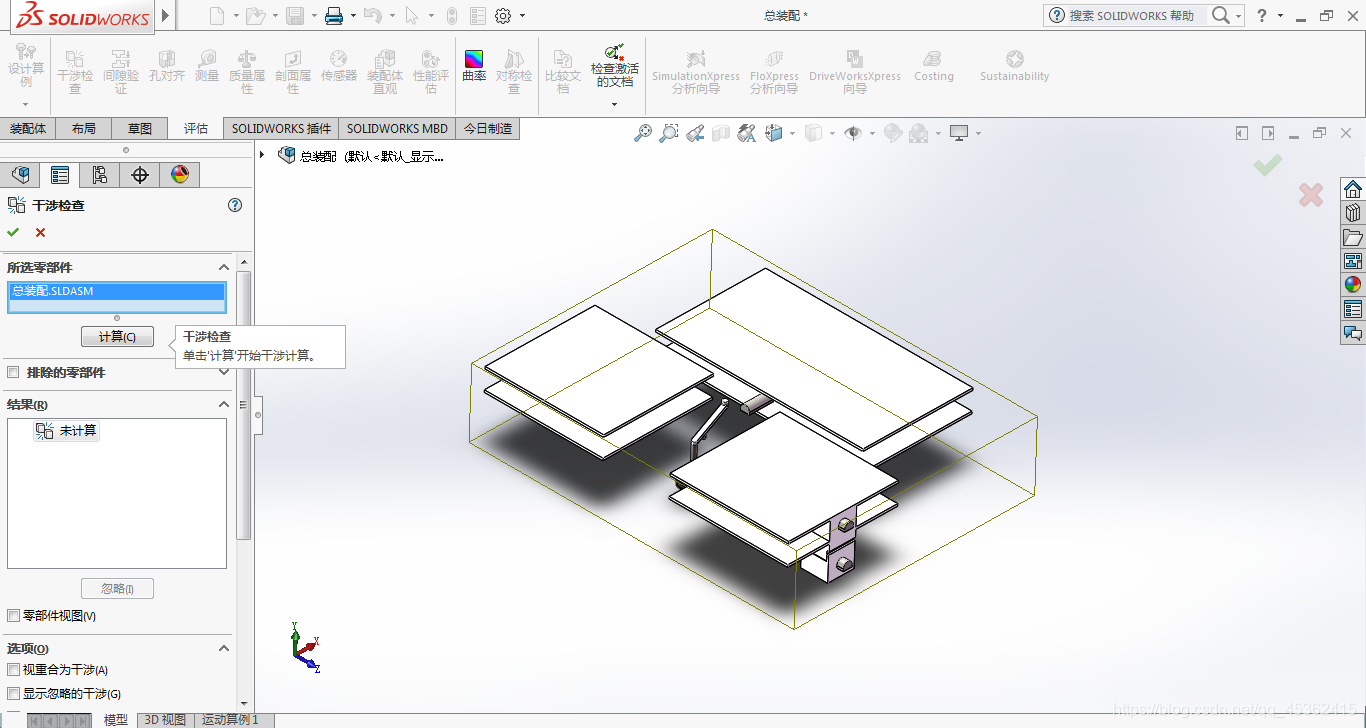
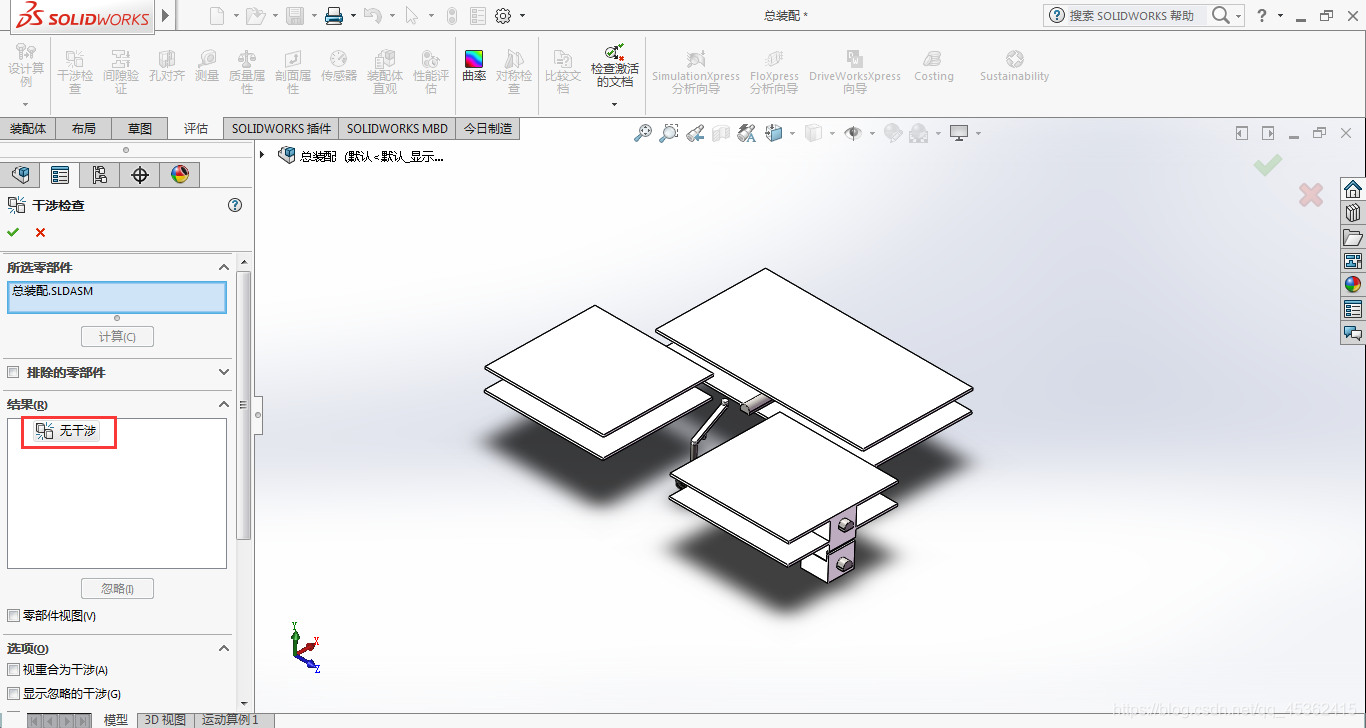
- 在
评估--干涉检查中选择干涉检查,并根据自己的需求,在提示下完成对装配体的干涉检查。
二、动态干涉检查——碰撞检查
- 首先打开一个装配图并将零件进行适当地装配,如图所示
- 在
装配体--移动零部件中勾选选项:碰撞检查
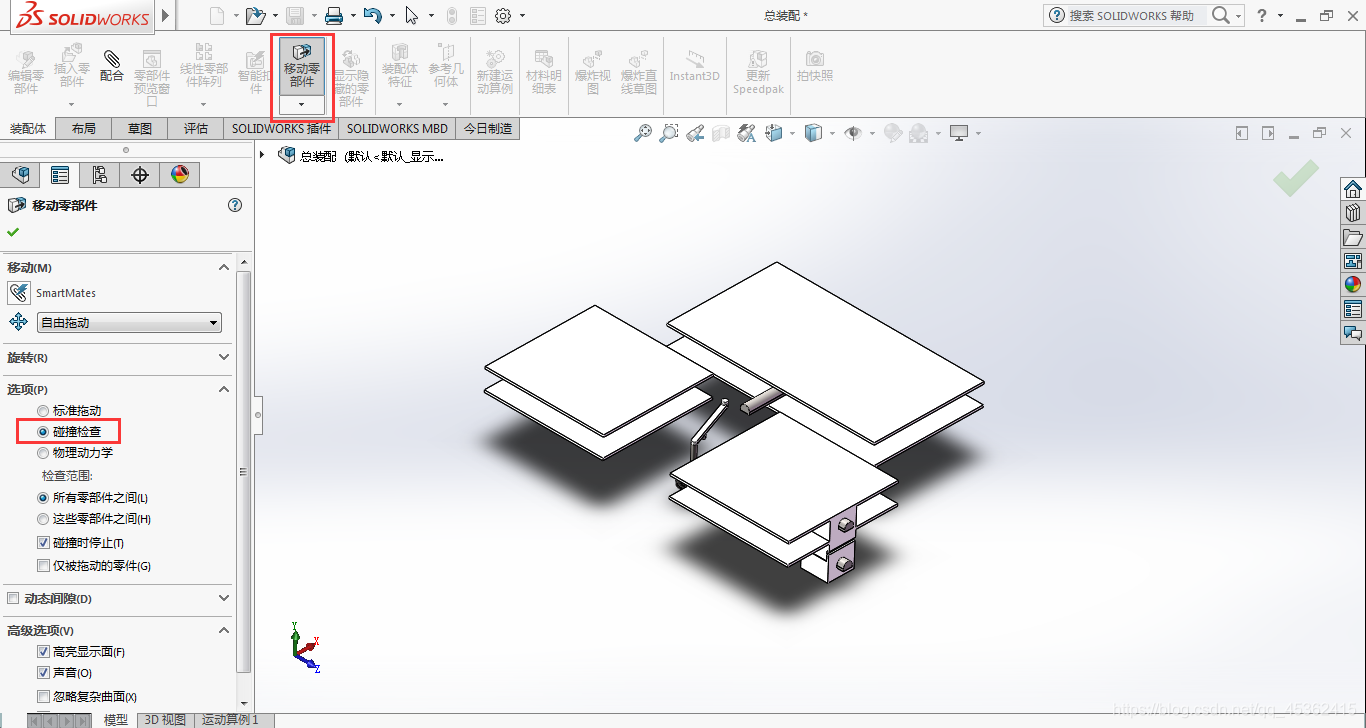
- 此时拖拽零部件,当发生物理碰撞时,软件会发出警告声音(要把高级选项中的声音一项勾选上),同时零件将无法被继续拖动(需要勾选选项中的碰撞时停止)。
在这里面还有很多的选项可以根据自身的实际情况进行设置。
三、运动过程中干涉检查——运动算例
-
首先打开一个装配图并将零件进行适当地装配,如图所示。
-
为运动中的零部件添加运动算例
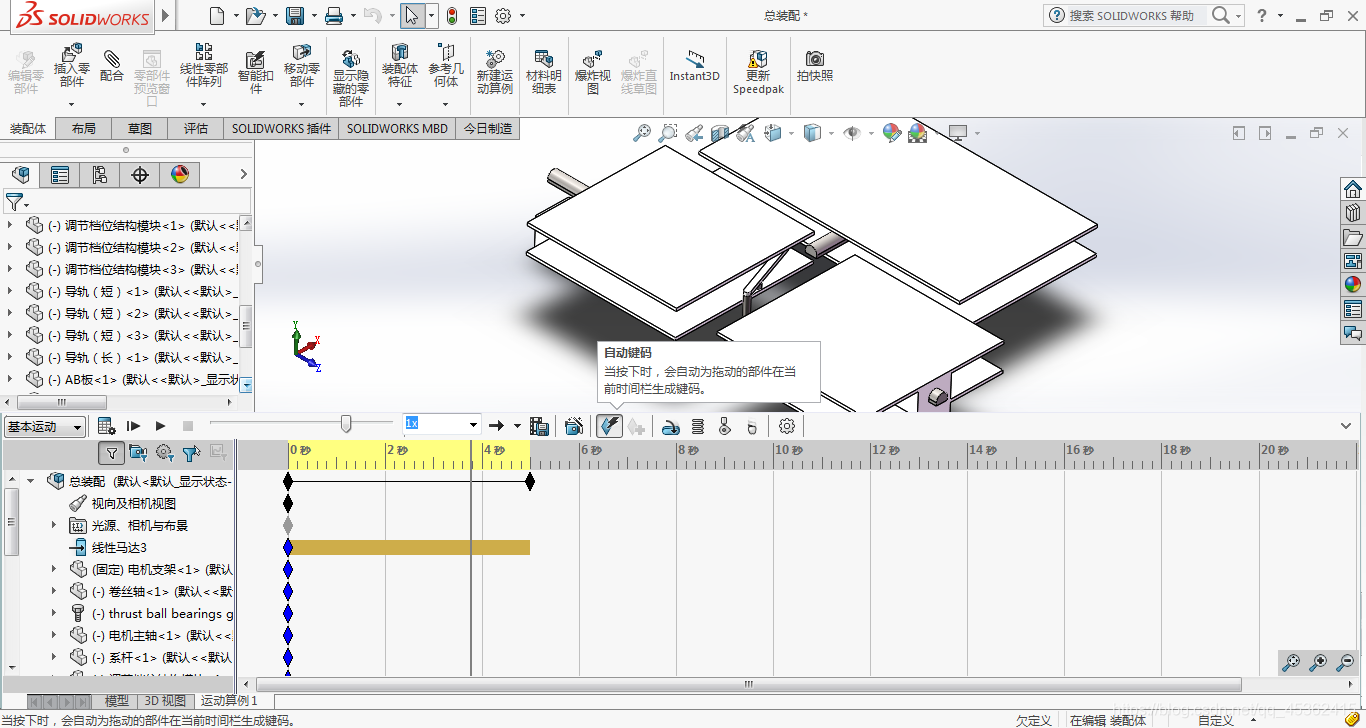 添加运动算例时,可以选择添加马达,也可以选择用鼠标直接拖拽。
添加运动算例时,可以选择添加马达,也可以选择用鼠标直接拖拽。 -
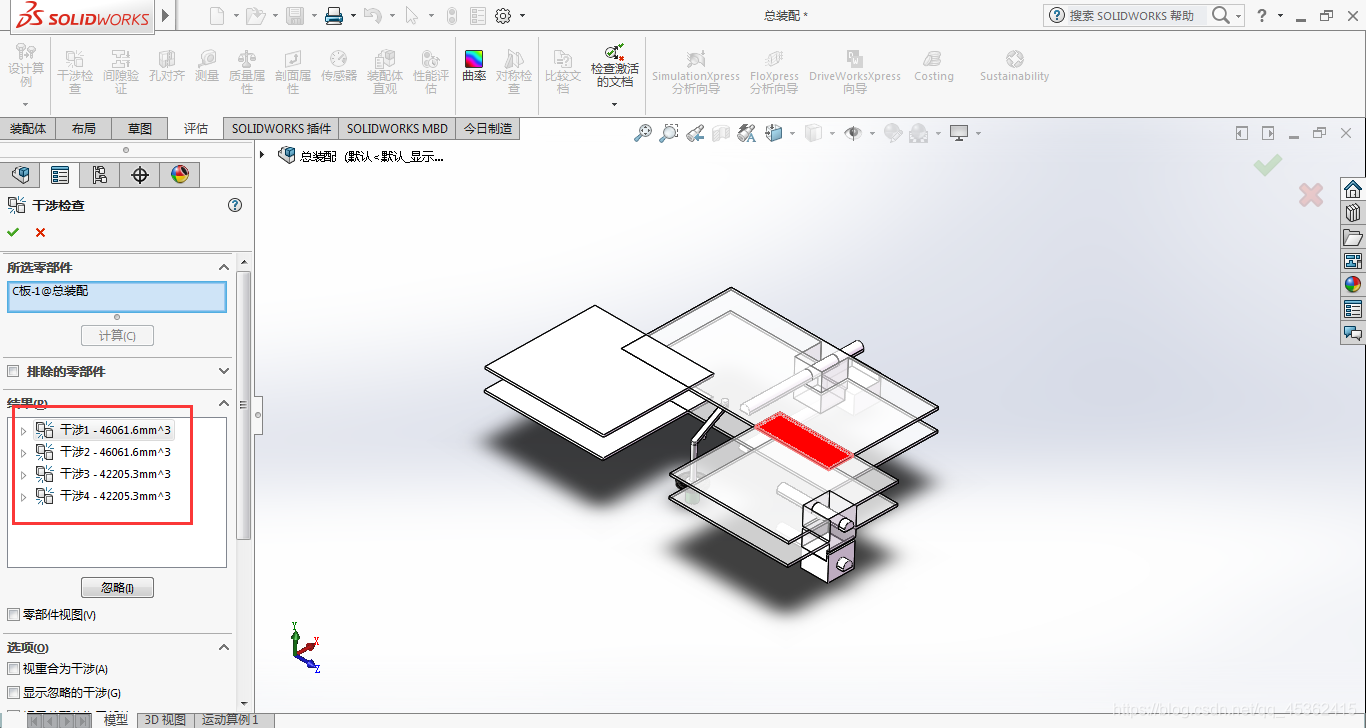
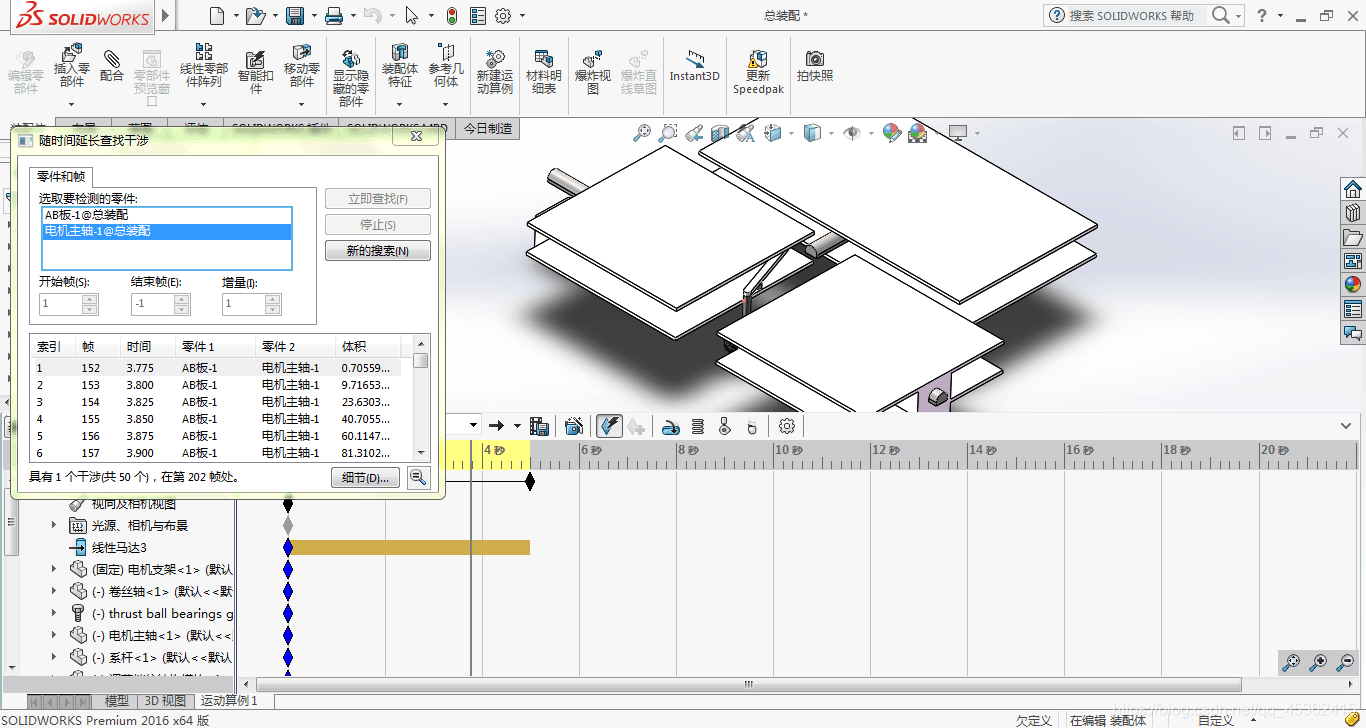
右键单击装配体--左键选择干涉检查,过选择零件来进行干涉检查,会将发生干涉的地方显示出来。
参考文章:
- https://www.sohu.com/a/221411584_760758

















 2791
2791

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









