







 文章详细阐述了设计光学系统的过程,包括基于初级像差理论的初始结构设定,通过解像差方程分配光焦度,然后逐步进行多轮优化以改善球差、慧差、位置色差和倍率色差。在优化过程中,调整了空气间隔、畸变目标值等参数,最终实现了像质的显著提升。
文章详细阐述了设计光学系统的过程,包括基于初级像差理论的初始结构设定,通过解像差方程分配光焦度,然后逐步进行多轮优化以改善球差、慧差、位置色差和倍率色差。在优化过程中,调整了空气间隔、畸变目标值等参数,最终实现了像质的显著提升。
设计步骤
设计步骤可以分为两步:
1、根据初级像差理论,通过解七个像差方程和一个光焦度方程求解一个初始结构;
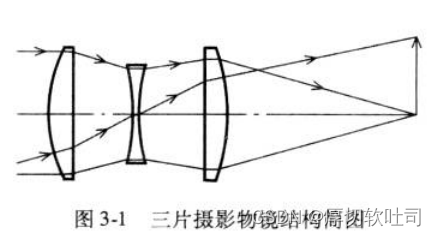
但是这里与 Richard Ditteon 方法不同,这里只解初级位置色差、初级倍率色差以及初级场曲三个像差方程和一个光焦度方程,确定三片物镜的光焦度分配。其余四个像差方程不再求解,简单的将三块透镜取常见的弯曲形状,即第一块取凸平、第二块取双凹(两个半径等值反号)、第三块取双凸(两个半径等值反号)。
2、将求解出的初始结构作进一步优化。
主要通过调整六个初级像差和一个实际像差目标值引导评价函数的方向,使初级像差和高级像差达到平衡。
设计需求
焦距: 100 mm
相对孔径:1/4.5
视场:
初始设计
在三片摄影物镜中,三块单片的厚度除了要考虑必要的通光孔径外,还需要保证加工和装配中镜片不易发生变形,所以一般不作为校正像差的变量。三块单片的六个球面半径以及两个空气间隔可以校正像差和满足焦距的要求,一共有八个变量。除去其中一个变量用来满足焦距的要求,另外七个变量可以用来校正七个像差。
但是列七个方程去求解太繁琐。由初级像差理论可知,单薄透镜的初级场曲系数、初级位置色差系数和初级倍率色差系数除与玻璃材料有关外,只与光焦度有关。所以,对单薄透镜来说,这三种像差只与透镜的两个半径搭配有关,而不对单块透镜的每一个半径做具体
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









