







相机畸变形成的机理
相机畸变主要是由于镜头的光学特性、制造工艺以及安装方式等因素导致的成像几何变形,包括
径向畸变(Radial Distortion)及切向畸变(Tangential Distortion)。
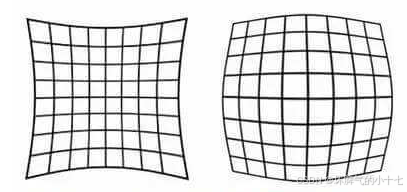
其中径向畸变是由于镜头曲率不均匀,尤其是边缘区域的折射效应与中心不一致造成,例如长焦镜头边缘光线折射角度减小,导致图像边缘向内收缩,直线呈凹陷状,形成枕形畸变(Pincushion Distortion),广角镜头(如鱼眼镜头)因边缘光线折射角度更大,导致图像边缘向外膨胀,直线呈桶状弯曲,形成桶形畸变(Barrel Distortion),以下分别是枕形和桶形畸变示意图:
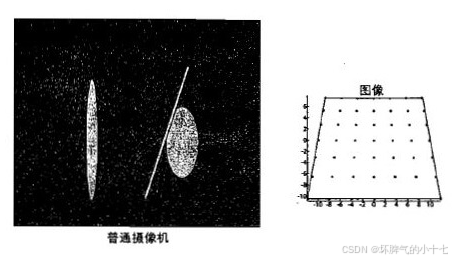
而切向畸变(Tangential Distortion),则是由于镜头与图像传感器(如CMOS/CCD)安装不平行,导致光轴倾斜,制造或组装误差(如镜片倾斜、传感器偏移)会使图像发生“剪切”形变,原本平行的线条变得倾斜,以下分别是切向畸变示意图:
除了以上情况造成及畸变,还有其他因素也可能造成畸变例如:镜头设计复杂度(多镜片组合可能引入更复杂的畸变、如非对称畸变)、 温度/压力变化:极端环境可能引起镜头物理形变,导致临时畸变。
相机畸变的影响及矫正理论
相机畸变的影响
相机畸变在视觉表现上会使直线变弯、物体比例失真、边缘模糊等、 而在在计算机视觉(如SLAM、三维重建)中,未校正的畸变则会降低算法精度,所以应该如何应对畸变呢?
相机畸变的矫正方法
手机相机的畸变矫正主要通过光学设计优化和软件算法协同实现,具体步骤如下:
1. 光学设计优化
非球面镜片:使用非球面镜片替代传统球面镜片,减少边缘光线折射误差,从物理层面降低畸变。
多镜片组合:通过多枚镜片(如6P、7P镜头)组合设计,相互补偿像差,优化光路均匀性。
镜头镀膜技术:减少杂散光干扰,避免因反射导致的边缘画质劣化。
2. 软件算法矫正
(1) 畸变参数标定
出厂校准,每台手机的镜头在出厂前通过标定板(如棋盘格)进行校准,计算以下参数:
径向畸变系数(k1, k2, k3):描述图像中心向外膨胀(桶形畸变)或收缩(枕形畸变)的程度。
切向畸变系数(p1, p2):由镜头与传感器安装偏差导致的偏移。
主点坐标(cx, cy):图像光学中心位置。
(2) 畸变模型应用
矫正映射,使用标定参数构建畸变矫正模型,通过反向映射算法对每个像素位置进行几何校正,公式示例:

插值处理: 矫正后的像素位置可能为非整数,需使用双线性插值或更高效的Lanczos插值算法生成平滑图像。
(3) 边缘处理
裁剪或填充,矫正后图像边缘可能产生黑边,通常选择裁剪或智能填充(如基于AI的内容延展)。
3. 实时处理与优化
预览实时矫正:
在相机预览时,通过GPU加速(如OpenGL ES)实时应用畸变矫正,确保用户所见即所得。
多镜头协同:
广角镜头:矫正桶形畸变,避免边缘拉伸。
长焦镜头:矫正枕形畸变,保持画面平整。
多摄切换:不同镜头的矫正参数无缝切换,避免视角跳跃。
4. AI增强技术
动态自适应矫正:
利用深度学习模型(如CNN)识别场景中的直线结构(如建筑边缘),针对性优化局部畸变。
示例:华为“XD Fusion”引擎通过AI分析场景,分区域调整畸变参数。
内容感知填充:
对裁剪后的边缘空白区域,使用生成对抗网络(GAN)生成合理背景内容。
相机畸变的矫正方法
一、标定前准备
1. 标定设备与环境
标定板:
棋盘格标定板:黑白方格交替(如8×6棋盘),方格尺寸精确(误差<0.01mm)。
高精度印刷:使用亚克力或玻璃材质,避免纸张变形。
其他选择:圆点阵列标定板(适合鱼眼镜头)。
环境要求:
光照均匀:使用漫反射光源(如LED柔光箱),避免镜面反光干扰。
温度控制:恒温(如25℃±1℃),防止镜头热胀冷缩导致参数漂移。
机械固定:手机与标定板通过夹具固定,确保相对位置稳定。
2. 标定工具
软件工具:
OpenCV:开源库(cv2.calibrateCamera函数)。
MATLAB相机标定工具箱。
厂商自研工具:如华为/苹果的工厂专用标定软件。
硬件辅助:
三轴机械臂:自动调整标定板角度(覆盖不同视角)。
高精度位移台:控制标定板与手机的精确距离(如0.1mm精度)。
二、标定流程
3. 数据采集
多角度拍摄:
拍摄至少 15~20张 不同角度、不同位置的标定板图像。
覆盖区域:
标定板需覆盖画面中心、四角及边缘区域。
标定板倾斜角度建议在±30°以内(避免极端角度导致特征点丢失)。
距离变化:标定板距离手机从最近对焦距离到无穷远(针对多焦距镜头分段标定)。
4. 特征点提取
角点检测:
使用 Harris角点检测 或 亚像素级优化算法(如OpenCV的findChessboardCorners函数)。
精度要求:角点坐标误差需控制在0.1像素以内。
畸变模型选择:
普通镜头:采用 Brown-Conrady模型(包含径向畸变k1/k2/k3和切向畸变p1/p2)。
广角/鱼眼镜头:使用 Kannala-Brandt模型 或改进多项式模型。
5. 参数计算
内参与外参分离:
内参(Intrinsic):焦距(fx, fy)、主点(cx, cy)、畸变系数(k1, k2, p1, p2, k3)。
外参(Extrinsic):每张图像中标定板的旋转矩阵R和平移向量t。
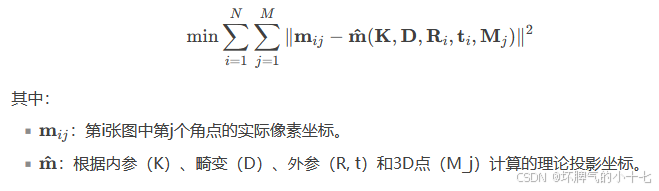
优化方法:
最小化重投影误差:通过非线性优化(如Levenberg-Marquardt算法)迭代求解。
公式:
6. 标定验证
重投影误差:
计算所有角点的平均误差(通常要求<0.3像素)。
误差过大时需检查角点提取精度或增加标定图像数量。
视觉验证:
将标定板矫正后的图像叠加网格线,观察直线是否平直。
使用实际场景测试(如拍摄建筑边缘检验畸变矫正效果)。
三、工厂量产标定
7. 自动化标定系统
设备集成:
机械臂自动调整标定板位置,相机模组固定在温控工装。
通过PLC控制标定流程,单台设备标定时间<30秒。
多温度点标定:
在高温(如50℃)、低温(-10℃)环境下重复标定,存储不同温度下的畸变参数。
运行时根据温度传感器数据动态切换参数。
8. 数据存储与应用
参数存储:
标定后的畸变系数写入手机 OTP(One-Time Programmable)存储器 或 ISP固件。
多摄系统需为每个镜头单独存储参数(如广角、超广角、长焦)。
实时矫正:
在ISP或GPU中预置矫正映射表(LUT),通过硬件加速实时应用畸变矫正。
四、标定挑战与解决方案
9. 边缘区域精度不足
解决方案:
增加标定板在画面边缘的覆盖密度。
使用高分辨率标定板(如4K打印分辨率)。
10. 动态环境适应性
温度补偿:
标定不同温度下的参数,运行时通过温度传感器动态调整。
华为Mate系列采用 温漂补偿算法,实时修正热膨胀导致的畸变变化。
老化补偿:
定期通过用户场景(如文档扫描)触发自校准。
11. 多摄协同标定
标定步骤:
单独标定每个镜头的畸变参数。
标定多摄之间的相对位置(外参)。
构建统一坐标系,确保多摄切换时视角平滑过渡。
五、示例:超广角镜头标定
标定板选择:使用大尺寸棋盘格(覆盖超广角边缘变形区域)。
数据采集:标定板贴近镜头(利用超广角近距离对焦能力)。
模型优化:针对桶形畸变(k1为负值),增加高阶项(k2, k3)拟合。
边缘裁剪:矫正后裁剪约10%~15%的边缘区域,保证画面平整。
六、工具与代码示例(基于OpenCV)
import cv2
import numpy as np
images = [cv2.imread(f"calib_{i}.jpg") for i in range(20)]
CHECKERBOARD = (7, 9) # 内部角点数(行×列)
objp = np.zeros((CHECKERBOARD[0]*CHECKERBOARD[1], 3), np.float32)
objp[:, :2] = np.mgrid[0:CHECKERBOARD[1], 0:CHECKERBOARD[0]].T.reshape(-1, 2)
objpoints = [] # 3D点
imgpoints = [] # 2D点
for img in images:
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD, None)
if ret:
objpoints.append(objp)
corners_refined = cv2.cornerSubPix(gray, corners, (11,11), (-1,-1),
(cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001))
imgpoints.append(corners_refined)
ret, K, D, rvecs, tvecs = cv2.calibrateCamera(
objpoints, imgpoints, gray.shape[::-1], None, None)
print(f"Distortion coefficients: {D.ravel()}")
对于同一颗镜头在不同焦距下的畸变矫正标定,需遵循以下步骤:
焦距点选择,离散标定点:在镜头的全焦段范围内选取关键焦距(如广角端、中间段、长焦端),通常间隔为焦距范围的10%~20%,示例:若镜头焦距为24-120mm,标定点可选24mm、35mm、50mm、85mm、120mm。
数据采集 > 畸变参数计算 > 标定验证 > 参数存储
建立查找表(LUT),将各焦距点的标定参数按焦距值排序存储。
{
"24mm": {"k1": -0.12, "k2": 0.03, "p1": 0.001, "p2": -0.002, "k3": 0.0005},
"50mm": {"k1": -0.08, "k2": 0.01, "p1": 0.0005, "p2": -0.001, "k3": 0.0002},
...
}
多焦距标定脚本(Python + OpenCV)
```python
import cv2
import numpy as np
# 定义焦距列表
focal_lengths = [24, 35, 50, 85, 120]
lut = {}
for fl in focal_lengths:
# 控制镜头变焦至fl mm(需硬件接口支持)
set_lens_focal_length(fl)
# 采集标定图像
images = capture_calibration_images()
# 标定计算
ret, K, D, rvecs, tvecs = cv2.calibrateCamera(...)
# 存储参数
lut[fl] = {
'K': K.tolist(),
'D': D.tolist()
}
# 保存LUT
import json
with open('distortion_lut.json', 'w') as f:
json.dump(lut, f)
相机畸变矫正常用模型
相机畸变模型是描述图像几何形变的数学模型,不同镜头类型适配不同的畸变模型,以下是常见模型及其对应镜头类型的详细解析:
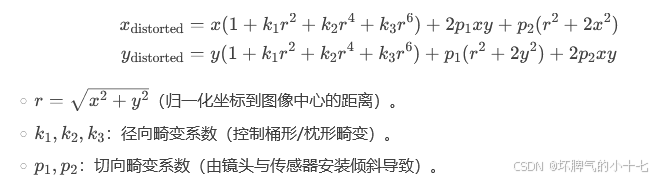
1. Brown-Conrady 模型(经典模型)
适用镜头:普通手机镜头、单反相机(非鱼眼),数学公式:
优点:
模型简单,计算效率高。
广泛支持(OpenCV、MATLAB等工具默认使用)。
缺点:
对大畸变(如鱼眼镜头)拟合能力不足。
高阶项(k3k_3k3)可能导致边缘过校正。
2. Kannala-Brandt 模型(鱼眼镜头专用)
适用镜头:鱼眼镜头、超广角镜头(如手机超广角模组),数学公式:
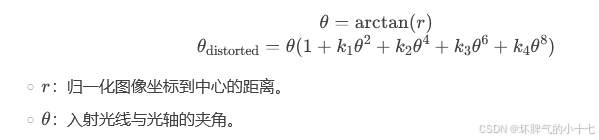
优点:
基于光线入射角度建模,更适合极端畸变(如180°视场角)。
支持多种鱼眼投影方式(等距、等立体角等)。
缺点:
参数更多(通常需标定4个径向系数)。
计算复杂度高于Brown-Conrady模型。
3. 多项式模型(改进型径向畸变)
适用镜头:无人机镜头、工业相机(中等畸变),公式:
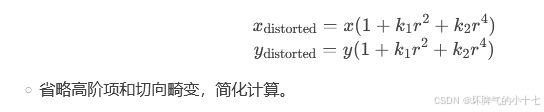
优点:
适用于轻度至中度畸变场景。
参数少,标定速度快。
缺点:
忽略切向畸变可能导致标定误差。
不适用于广角或鱼眼镜头。
4. 针孔模型 + 畸变修正(理想模型扩展)
适用镜头:近理想光学系统(如长焦镜头),公式:
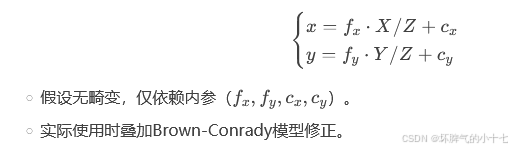
优点:
模型简单,适合理论分析。
缺点:
忽略实际畸变,仅用于理想化场景。
5. 分区域畸变模型(AI增强型)
适用镜头:手机多摄系统(混合焦距)。
原理:将图像划分为多个区域,每个区域独立标定畸变参数, 结合深度学习预测局部畸变(如谷歌Pixel的AI矫正)。
优点:
适应复杂畸变分布(如超广角边缘拉伸)。
提升视觉观感(避免全局模型过度平滑)。
缺点:
标定数据量需求大。
实时计算需NPU/GPU加速。

基于AI的畸变矫正算法
1. 监督学习:端到端像素级矫正
原理:
使用成对的畸变-矫正图像数据集训练卷积神经网络(CNN),直接预测矫正后的像素坐标或图像,典型网络结构:
U-Net:编码器-解码器结构,保留局部细节(适合高分辨率图像)。
FlowNet:预测畸变场(Dense Optical Flow),通过光流扭曲实现矫正。
优点:
可处理复杂畸变(如非对称、局部形变)。
自动学习镜头特性,减少人工标定依赖。
挑战:
需要大量精确配对的训练数据(采集成本高)。
模型泛化能力依赖数据多样性(如不同光照、场景)。
2. 无监督学习:自监督畸变建模
无需成对数据,通过几何一致性约束(如直线应为直线)或自生成监督信号。
典型方法:
几何先验约束:设计损失函数惩罚图像中的曲线结构(如建筑边缘弯曲)。
对抗训练(GAN):生成器输出矫正图像,判别器判断是否“符合自然图像分布”。
案例:
谷歌《DeepCalib》:通过自监督学习从单张图像估计鱼眼镜头参数。
优点:
摆脱对标注数据的依赖。
适应未知镜头型号的畸变矫正。
3. 混合模型:传统模型 + AI优化
用AI优化传统模型的参数(如动态调整k1/k2系数)或补偿残差畸变。
实现方式:
参数预测网络:输入图像特征,输出Brown-Conrady模型系数。
残差学习:传统模型矫正后,用CNN进一步修复局部失真。
优点:
结合物理可解释性与AI灵活性。
计算量可控,适合移动端部署。
4. 深度强化学习(DRL):动态自适应矫正
将畸变矫正建模为序列决策问题,通过奖励函数(如直线平直度、用户评分)优化策略。
应用场景:
实时视频流中动态调整矫正参数(如运动相机防抖+畸变矫正联合优化)。
优点:
适应动态变化(如温度漂移、机械振动)。
缺点:
训练复杂度高,需模拟环境支持。
感谢您阅读到最后!😊总结不易,希望多多支持~🌹 点赞👍收藏⭐评论✍️,您的三连是我持续更新的动力💖~



















 550
550

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











