







图像配准(Image Registration)是将不同时间、不同传感器或不同视角下获取的同一场景的多幅图像进行空间对齐的过程,广泛应用于医学影像、遥感、计算机视觉等领域,其核心目标是通过几何变换消除图像间的空间差异,使对应点在同一坐标系下对齐。

一、图像配准基本原理
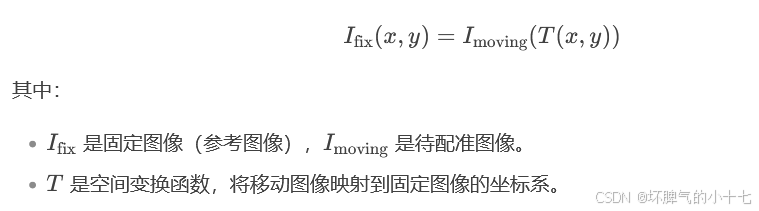
图像配准的核心思想是找到两幅图像之间的空间变换关系,使得变换后的图像与目标图像在几何上对齐。其数学描述为:
二、图像配准流程
典型的图像配准流程分为以下步骤:
1、特征检测(Feature Detection)
从两幅图像中提取显著的特征(如边缘、角点、区域等),作为配准的基准点,常用方法:基于特征点:SIFT、SURF、ORB、Harris角点检测;基于区域:模板匹配、互信息(适用于多模态图像);基于深度学习:使用卷积神经网络(CNN)自动提取特征。
2、特征匹配(Feature Matching)
建立两幅图像特征之间的对应关系,找到匹配点对,常见的匹配方法:1)最近邻匹配:计算特征描述子的欧氏距离或余弦相似度;2)鲁棒匹配算法:RANSAC(随机采样一致性)去除误匹配;3)图匹配算法:基于图结构的特征关系匹配。
3、 变换模型估计(Transformation Estimation)
根据匹配的特征点对,估计最优的空间变换参数,常见的变换模型:1)刚体变换(Rigid):平移 + 旋转,适用于同一视角的刚性物体;2)仿射变换(Affine):平移、旋转、缩放、剪切,适用于轻微形变;3) 投影变换(Projective):适用于视角变化;4)非刚性变换(Non-rigid):如样条变换(B-spline)、弹性变换,适用于复杂形变(如器官变形)。
3、图像重采样与插值(Resampling & Interpolation)
将移动图像根据估计的变换模型进行几何变换,生成配准后的图像,插值方法:最近邻插值(速度快,但精度低)、双线性插值(平衡速度与精度)、三次卷积插值(高精度,计算量大)。
三、关键技术方法
1、基于特征的配准
优点:计算效率高,对光照和噪声鲁棒。
缺点:依赖特征检测的准确性,可能丢失全局信息。
典型算法:SIFT(尺度不变特征变换)、SURF(加速鲁棒特征)。
2、基于灰度的配准
原理:直接利用像素灰度值计算相似性度量(如互相关、互信息)。
优点:无需特征提取,适用于低对比度图像。
缺点:计算量大,对噪声敏感。
典型算法:归一化互相关(NCC)、互信息(MI)。
3、基于深度学习的配准
原理:使用神经网络(如CNN、U-Net)直接学习变换参数。
优点:端到端优化,适应复杂形变。
典型算法:VoxelMorph(医学影像)、FlowNet(光流估计)。
四、应用场景
医学影像:CT、MRI多模态图像融合,手术导航;遥感图像:多时相卫星图像拼接、变化检测;
计算机视觉:全景图生成、目标跟踪;工业检测:缺陷比对、三维重建。
五、挑战与优化方向
大形变配准:如器官的非线性形变;多模态配准:不同成像模态(如MRI与超声)的灰度差异;
实时性:高分辨率图像的快速配准;鲁棒性:噪声、遮挡和局部形变的处理。
六、工具与代码实现
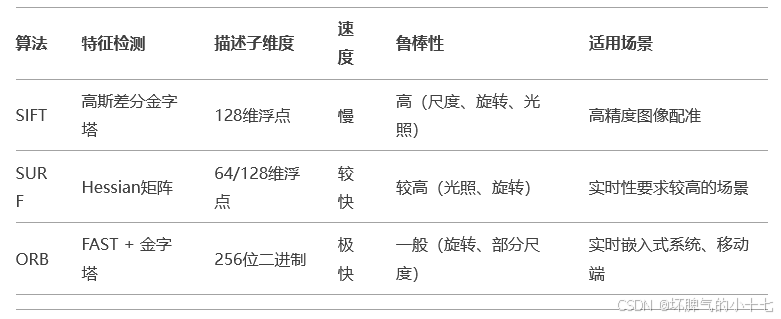
1、 SIFT(尺度不变特征变换)Scale-Invariant Feature Transform,核心思想:SIFT 是一种尺度不变、旋转不变的特征检测与描述算法,通过在不同尺度空间中提取关键点并生成具有鲁棒性的描述子,适用于图像缩放、旋转、光照变化等场景。
2、 SURF(加速稳健特征)Speeded-Up Robust Features,核心思想:SURF 是SIFT的加速改进版本,通过积分图像和Hessian矩阵近似提高计算效率,同时保持对尺度、旋转和光照变化的鲁棒性。
3、ORB(Oriented FAST and Rotated BRIEF)核心思想:ORB 结合了 FAST关键点检测 和 BRIEF描述子,并引入方向信息和尺度不变性,专为实时应用设计,适合移动设备和嵌入式系统。
# OpenCV:支持SIFT、SURF、ORB的完整实现。
import cv2
# SIFT
sift = cv2.SIFT_create()
kp1, des1 = sift.detectAndCompute(img1, None)
# SURF
surf = cv2.xfeatures2d.SURF_create()
kp2, des2 = surf.detectAndCompute(img2, None)
# ORB
orb = cv2.ORB_create()
kp3, des3 = orb.detectAndCompute(img3, None)
 基于光流法(Optical Flow)的图像匹配是一种通过估计图像序列中像素点的运动矢量(即光流场)来实现连续帧间对齐的技术。其核心思想是利用时间连续性和空间一致性假设,跟踪像素在相邻图像中的运动轨迹。光流法广泛应用于视频稳定、运动目标检测、SLAM(同步定位与地图构建)等领域。
基于光流法(Optical Flow)的图像匹配是一种通过估计图像序列中像素点的运动矢量(即光流场)来实现连续帧间对齐的技术。其核心思想是利用时间连续性和空间一致性假设,跟踪像素在相邻图像中的运动轨迹。光流法广泛应用于视频稳定、运动目标检测、SLAM(同步定位与地图构建)等领域。
一、光流法的基本原理
- 基本假设:亮度恒定假设(Brightness Constancy):同一物体在相邻帧中的像素亮度保持不变。

微小运动假设(Small Motion):相邻帧之间的位移 dx,dy 和时间间隔 dt足够小,可通过泰勒展开近似:
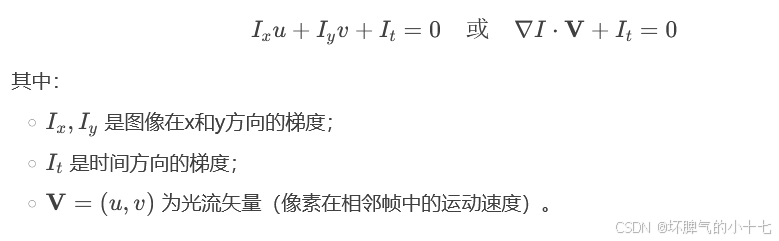
 结合亮度恒定假设,可得 光流方程:
结合亮度恒定假设,可得 光流方程:
- 光流的求解问题
光流方程是一个欠定方程(一个方程两个未知数 u,vu, vu,v),需引入额外的约束条件才能求解。常用的方法包括:
Lucas-Kanade方法(稀疏光流):假设局部区域内光流一致。
Horn-Schunck方法(稠密光流):引入全局平滑性约束。
代码示例:
import cv2
import numpy as np
# 读取视频帧
cap = cv2.VideoCapture("input_video.mp4")
ret, prev_frame = cap.read()
prev_gray = cv2.cvtColor(prev_frame, cv2.COLOR_BGR2GRAY)
# Shi-Tomasi角点检测
prev_pts = cv2.goodFeaturesToTrack(prev_gray, maxCorners=200, qualityLevel=0.01, minDistance=30)
# 创建掩码用于可视化
mask = np.zeros_like(prev_frame)
while True:
ret, next_frame = cap.read()
if not ret:
break
next_gray = cv2.cvtColor(next_frame, cv2.COLOR_BGR2GRAY)
# LK光流计算
next_pts, status, _ = cv2.calcOpticalFlowPyrLK(prev_gray, next_gray, prev_pts, None)
# 筛选有效点
good_new = next_pts[status == 1]
good_old = prev_pts[status == 1]
# 绘制运动轨迹
for i, (new, old) in enumerate(zip(good_new, good_old)):
a, b = new.ravel()
c, d = old.ravel()
mask = cv2.line(mask, (int(a), int(b)), (int(c), int(d)), (0, 255, 0), 2)
next_frame = cv2.circle(next_frame, (int(a), int(b)), 5, (0, 0, 255), -1)
img = cv2.add(next_frame, mask)
cv2.imshow("Optical Flow", img)
if cv2.waitKey(30) & 0xFF == ord('q'):
break
# 更新前一帧和特征点
prev_gray = next_gray.copy()
prev_pts = good_new.reshape(-1, 1, 2)
cap.release()
cv2.destroyAllWindows()
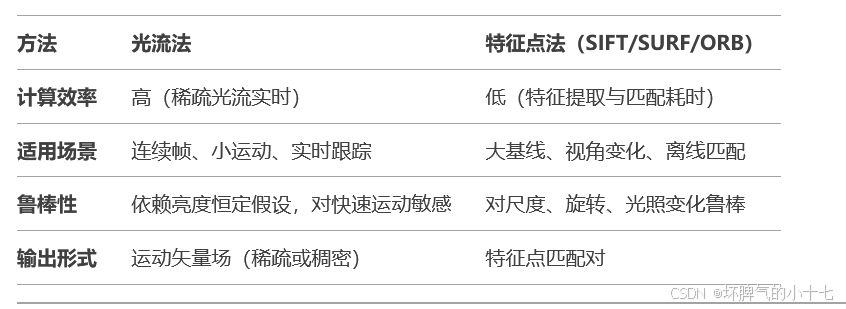
特征点法与光流法对比:
感谢您阅读到最后!😊总结不易,希望多多支持~🌹 点赞👍收藏⭐评论✍️,您的三连是我持续更新的动力💖~



















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











