






淘晶驰屏幕+arduino控制步进电机
ps:写的不好请指正。
1、准备材料
- 淘晶驰屏幕(带有触屏功能)
- arduino UNO板子
- 面包板
- 电源以及相关的配件
- 步进电机+配套启动器
- 电源设备交流转直流(根据自己电机相应适配)
2、整体思路
陶晶驰作为控制面板通过电机屏幕向arduino板发送控制信号,arduino接受到控制信号之后通过相应的程序分析,向启动器发送启动控制信号,带动步进电机做相应的转动。
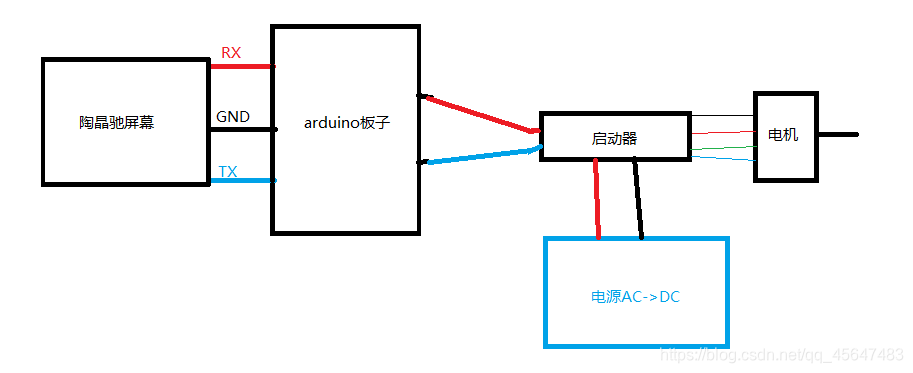
3、接方式
- 启动器+步进电机+电源设备

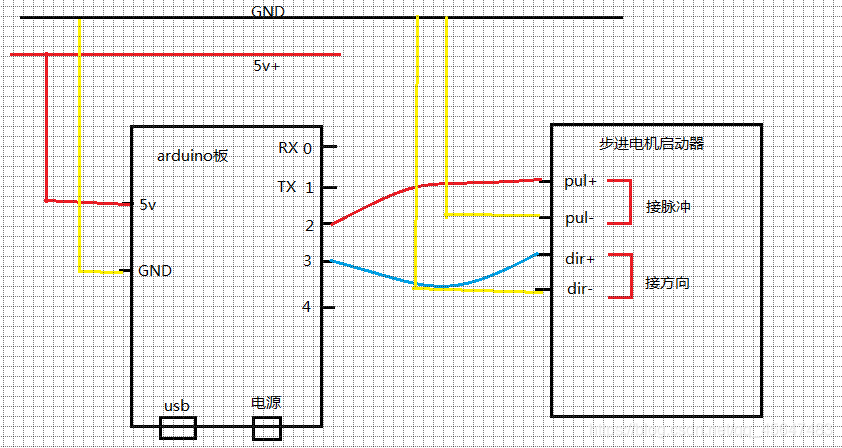
- arduino与启动器
根据程序做出相应的改进(对照上图的接脉冲和接方向)。
ps1:当用usb或者接上电源的情况下5v接口不用再外接电源板。使用usb或者电源接口直接供电即可。
ps2:此图采用共阴接法,启动器的pul-和dir-要与arduino板GND相接。
- arduino与陶晶驰屏幕
A: 供电:我是使用官方电源和TTL转换器作为电源给屏幕供电(电源接上TTL,从TTL转换器的正负极分别接屏幕的正负极)。
B:信号传输:屏幕的TX和RX线分别引出和arduino的TX和RX相连。
ps:一点要从负极(GND)引线接到arduino的GND接口(我在连接的时候之前没有接地,只能通过TTL的usb接线与电脑连接才可以控制。)
4、代码
- arduino代码
//定义引脚
#define STEPPIN1 2
#define DIRPIN1 3
void receive_data(void);
void test_date(void);
void do_command(void);
void qingchu(void);
String zifu="";
int mark;
int comdata[2]={0};
int go_mark=0;
int back_mark=0;
int stop_mark=0;
void setup()
{
pinMode(STEPPIN1, OUTPUT);
pinMode(DIRPIN1, OUTPUT);
Serial.begin(9600);
}
void loop() {
if (Serial.available() >0)
{
receive_data();//接受数据函数
test_date();//检验函数
do_command();//执行函数
qingchu();//初始化数据
delay(50);
}
}
void receive_data()
{
int j=0;
while(Serial.available()>0)
{
zifu+=char(Serial.read());
Serial.println(zifu);
delay(100);
mark=1;
}
if (mark==1)
{
for(int i=0;i<zifu.length();i++)
{
if(zifu[i]==',')
{
j++;
}
else
{
comdata[j]=comdata[j]*10+(zifu[i]-'0');
}
}
zifu=String("");
mark=0;
}
}
void test_date()
{
if(comdata[0]==55)
{
if(comdata[1]==20)
{
go_mark=2;
}
if(comdata[1]==30)
{
back_mark=2;
}
if(comdata[1]==50)
{
stop_mark=2;
}
}
}
void do_command()
{
if(go_mark==2)
{
digitalWrite(DIRPIN1, HIGH);//方向
digitalWrite(STEPPIN1, HIGH);//脉冲
tone(STEPPIN1,500);//可以通过更改脉冲频率改变速度
}
if(back_mark==2)
{
digitalWrite(DIRPIN1, LOW);
digitalWrite(STEPPIN1, HIGH);
tone(STEPPIN1,500);
}
if(stop_mark==2)
{
digitalWrite(STEPPIN1, LOW);
noTone(STEPPIN1);
}
}
void qingchu()
{
for(int i=0;i<=2;i++)
{
comdata[i]=0;
}
go_mark=0;
back_mark=0;
stop_mark=0;
mark=0;
Serial.flush();
}
- 陶晶驰屏幕代码
屏幕按键界面(简单的构建了一个)
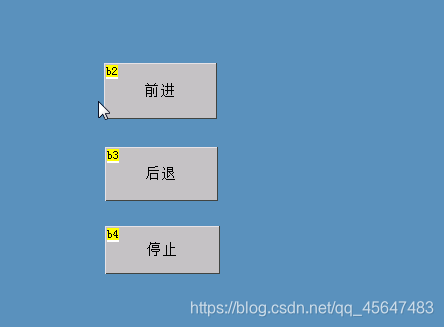
代码部分:
点击前进(弹起事件)
prints "55,10",0
点击后退(弹起事件)
prints "55,20",0
点击停止(弹起事件)
prints "55,50",0
5、推荐学习网站
ps:并非广告,个人觉得不错的资源。
6、附上视频
ps:这是以前做的拍的视频可能和这个有点不同,视频中是三个电机。但是原理都一样。
最后希望这篇文章对你有很大帮助。

















 2881
2881

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









