






PID
PID即:Proportional(比例)、Integral(积分)、Differential(微分)的缩写。
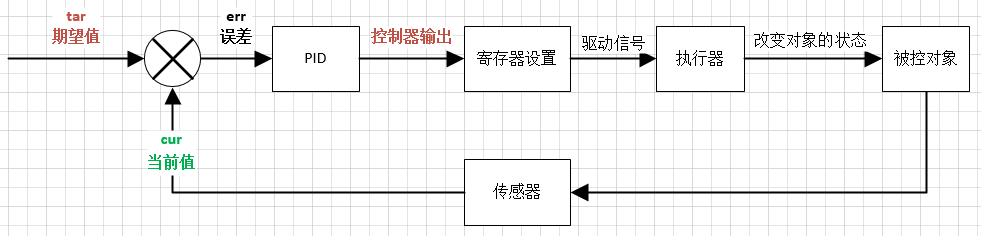
PID中三个参数,大体对应于控制系统的三个最重要的方面:
P对应“快”,对误差进行预判、做出快速反应,D对应“稳”,即稳定性,放大控制作用;I对应“准”,消除稳态误差;。
还可以这么理解pid: p是控制现在,i是纠正曾经,d是管控未来!只有不忘过往,把握当前,规划未来才能让人生的轨迹按照既定的目标前进。讲真,可以去理解下弹性阻尼系统,对pid的内涵会更加深刻。
还有别人的理解:p才是纠正曾经,i是反省现在:自己是否还原地踏步;
常用PID算法:①PI算法;②PD算法;③PID算法;
上图中的PID一项可细分为下图的三项;
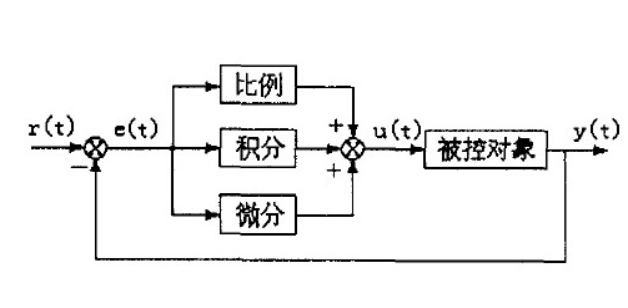
对应上述的PID参数的作用;
详细介绍下PID三者结合的控制算法:
③PID算法:
将比例、积分、微分三种调节规律结合在一起, 只要三项作用的强度配合适当,既能快速调节,又能消除余差,可得到满意的控制效果。
特点:
PID 控制作用中,比例作用是基础控制;微分作用是 用于加快系统控制速度;积分作用是用于消除静差。
只要比例、积分、微分三种控制规律强度配合适当, 既能快速调节,又能消除余差,可得到满意控制效果。
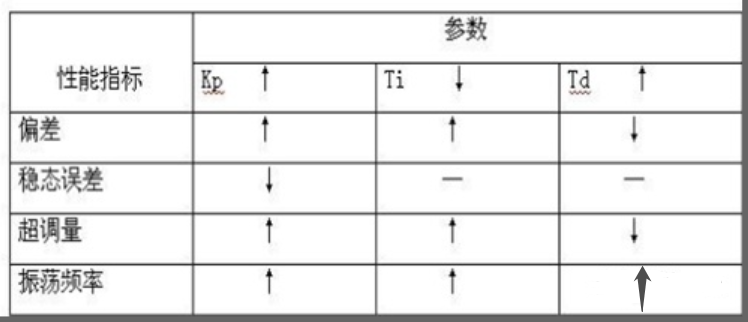
Kp 较小时,系统对微分和积分环节的引入较为敏感,积分会引起超调,微分可能会引起振荡,而振荡剧烈的时候超调也会增加。
Kp 增大时,积分环节由于滞后产生的超调逐渐减小,此时如果想要继续减少超调可以适当引入微分环节。继续增大 Kp 系统可能会不太稳定,因此在增加 Kp 的同时引入 Kd 减小超调,可以保证在 Kp 不是很大的情况下也能取得较好的稳态特性和动态性能。
Kp 较小时,积分环节不宜过大,Kp 较大时积分环节也不宜过小(否则调节时间会非常地长),当使用分段PID ,在恰当的条件下分离积分,可以取得更好的控制效果。原因在于在稳态误差即将满足要求时,消除了系统的滞后。因此系统超调会明显减少。
位置型PID和增量型PID的比较:
位置式需引入初始阀位值,增量式不需要
位置式需防积分饱和,增量式不会产生积分饱和
只有存在偏差时,增量式才会有输出
增量式容易实现从手动到自动的切换
位置式PID控制的输出与整个过去的状态有关,用到了误差的累加值;而增量式PID的输出只与当前拍和前两拍的误差有关,因此位置式PID控制的累积误差相对更大;
增量式PID的优缺点:
优:
①算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果;
②计算机每次只输出控制增量,即对应执行机构位置的变化量,故机器发生故障时影响范围小、不会严重影响生产过程;
③手动—自动切换时冲击小。当控制从手动向自动切换时,可以作到无扰动切换。
缺:
①需要对控制量进行记忆。
②存在稳态误差
以下是一个动态演示;
下面是某电机控制中的连环的PID参数的作用:
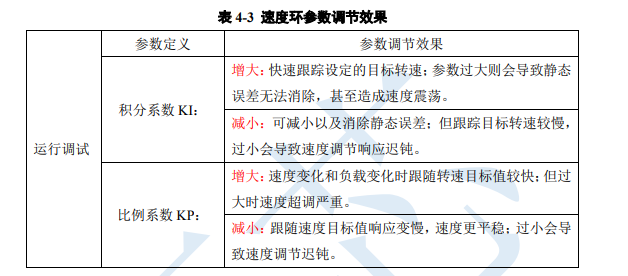
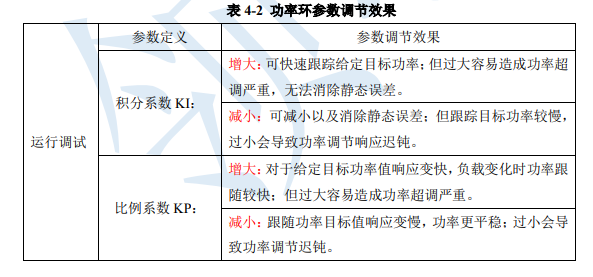
可以了解到,PID控制算法多种多样,应用场景也多种多样,同时体现到PID控制算法的重要性。

















 806
806

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









