







知识就是力量
风传感器篇

简介
1. 机械式风速传感器
这种类型的传感器通常由旋转叶片组成,当风吹过时带动叶片转动。转速与风速成正比关系,通过计算叶片的转速即可得出风速值。
- 叶片连接到一个编码器或者发电机上,输出电信号。
- 输出信号可以是脉冲频率或者是电压变化。
优点: - 结构简单可靠,易于维护。
- 成本较低,适合大规模部署。
缺点:
- 对低速气流响应较慢,灵敏度不足。
- 易受沙尘或其他颗粒物干扰而损坏。
2. 超声波风速传感器
利用超声波传播的时间差来测定风速。具体过程如下:
- 发射两个方向相反的超声波信号,在顺风和逆风条件下,声音传播时间会有所不同。
- 测量这两个时间差异,并结合已知的距离参数,就可以计算出实际风速。
公式表示为:
v
=
d
t
+
−
t
−
v = \frac{d}{t_+ - t_-}
v=t+−t−d
其中 $ v $ 是风速,$ d $ 是距离,$ t_+, t_- $ 分别代表顺风和逆风条件下的传播时间。
优点:
- 支持无移动部件设计,使用寿命长。
- 可同时测量风向和风速,精度较高。
- 不易受到电磁场的影响。
缺点:
- 初始购置费用相对昂贵。
- 在极端天气条件下可能出现误差(例如浓雾或雨雪环境中)。
3. 热电偶型风速计 (热线风速仪)
该种传感器依靠加热元件(通常是金属丝)感知周围环境温度的变化以确定风速大小。
- 当没有风的时候,加热元件保持恒定温度;一旦有风经过,则带走热量导致降温效应加剧。
- 温度下降程度直接反映了当前风速强度,因此可以通过监测电阻改变情况得到相应数据。
优点:
- 极高的分辨率,特别适于微小风速检测。
- 响应速度快,实时性强。
缺点:
- 容易因污染而导致性能下降。
- 工作时需要持续供电,能耗较大。
4. 激光多普勒测速法(LDV)
这是一种高精度但成本较高的方法,适用于实验室研究领域中的精确测量需求。
- 利用光束散射现象检测颗粒运动轨迹从而推算出气体流动状况。
- LDV系统能够提供瞬态信息并且具备非接触特性,非常适合复杂湍流场分析应用场合。
优点: - 提供极高水平的数据准确性和重复性。
- 非侵入式的探测手段减少了对被测对象本身的扰动。
缺点:
- 设备复杂且价格高昂,不适合常规用途。
- 运行环境要求苛刻,需保证足够的光学透明度。
电路
磁性霍尔传感器
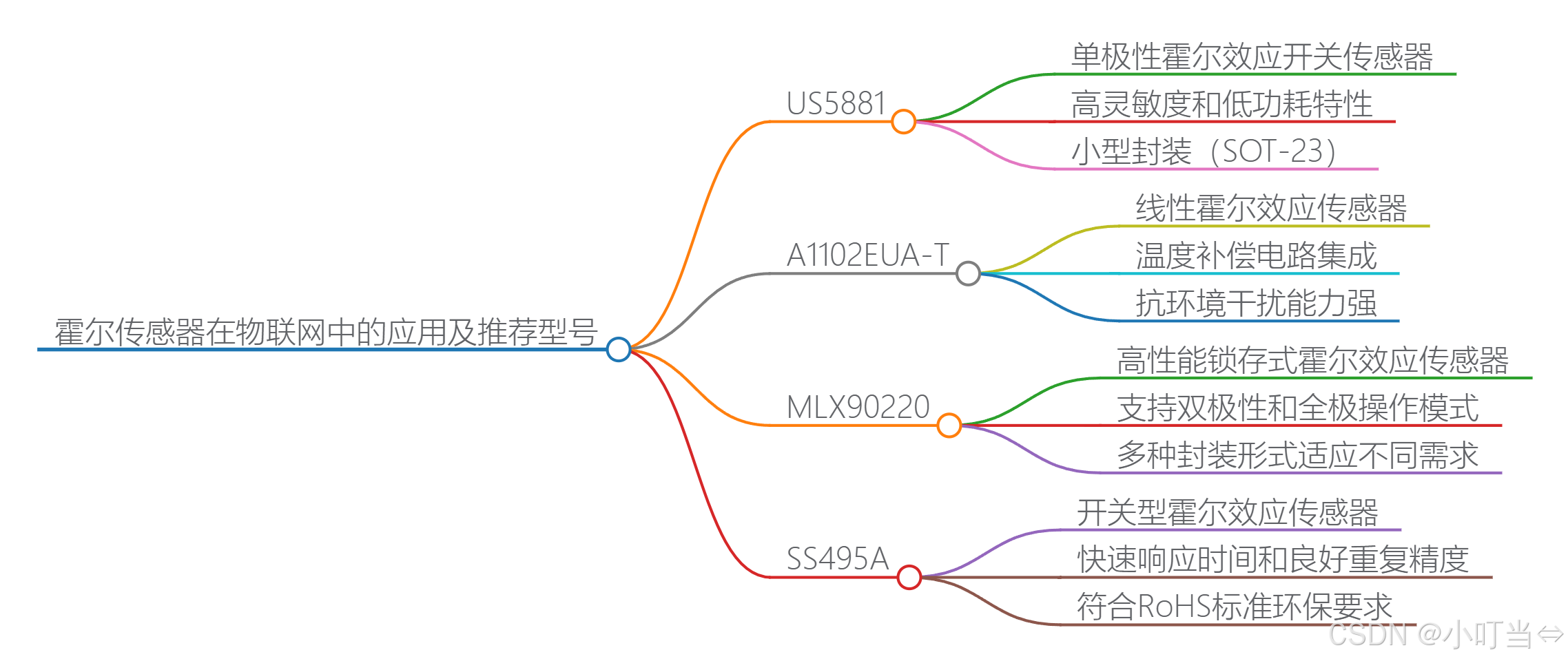
(1) 开关型霍尔传感器
- 原理:当磁场强度超过阈值时输出开关信号(高/低电平)。
- 常用型号:
- A3144(单极型):仅响应单一磁极(如S极靠近时触发)。
- AH44E(双极型):交替磁极触发(S极靠近开,N极靠近关)。
- US1881(全极型):任意磁极靠近均触发。
- 特点:简单易用,适合位置检测(如门窗开关、限位开关)。
(2) 线性霍尔传感器
- 原理:输出电压与磁场强度成比例变化。
- 常用型号:
- SS49E(模拟输出):测量距离或磁场强度。
- MLX90248(高精度):适用于电流检测或角度测量。
- 特点:需ADC转换,适合连续量检测(如电流传感器、位移测量)。
(3) 数字霍尔传感器(带I2C/SPI接口)
- 原理:集成数字接口,直接输出磁场强度或角度数据。
- 常用型号:
- AS5600(I2C接口):用于旋转编码器(如DIY旋钮、电机转速检测)。
- TLE493D(3D磁场检测):可测三维磁场方向(如手势控制)。
案例
以下是 AS5600 磁性旋转位置传感器 的引脚详细说明及其功能解析,帮助您正确连接和使用该芯片:
AS5600 引脚概览(SOIC-8/TSSOP-8封装)
以下是该芯片各引脚功能的详细解释:
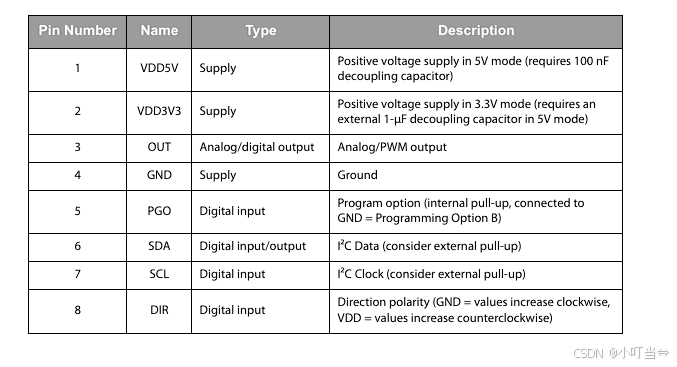
| 引脚编号 | 名称 | 类型 | 功能描述 |
|---|---|---|---|
| 1 | VDD5V | 电源(供电) | 5V 模式下的正电压供电,需连接 100 nF 去耦电容 以稳定电压。 |
| 2 | VDD3V3 | 电源(供电) | 3.3V 模式下的正电压供电。若在 5V 模式下使用,需额外连接 1 μF 去耦电容。 |
| 3 | OUT | 模拟/数字输出 | 模拟/PWM 输出: - 模拟模式:输出 0~VDD 的电压(与角度成正比); - PWM 模式:输出 12-bit 分辨率 PWM 信号。 |
| 4 | GND | 电源(地) | 接地引脚,必须连接到系统 GND。 |
| 5 | PGO | 数字输入 | 编程选项引脚: - 悬空(内部上拉)或接 VDD = 默认模式; - 接地(GND)= 编程模式 B(如 I²C 地址更改)。 |
| 6 | SDA | 数字输入/输出 | I²C 数据线(开漏输出),需外接 4.7 kΩ 上拉电阻(典型值)。 |
| 7 | SCL | 数字输入 | I²C 时钟线(开漏输出),需外接 4.7 kΩ 上拉电阻(典型值)。 |
| 8 | DIR | 数字输入 | 方向控制引脚: - 接 GND = 顺时针旋转时角度值增加; - 接 VDD = 逆时针旋转时角度值增加。 |
关键注意事项:
- 电源模式:根据供电电压(5V或3.3V)选择对应的引脚(VDD5V或VDD3V3),并确保正确配置去耦电容。
- I²C通信:SDA和SCL引脚通常需要外接4.7 kΩ上拉电阻以确保信号稳定性。
- 方向控制:DIR引脚的状态直接影响传感器或执行器的数值变化方向,需根据实际需求连接。
此配置适用于需要模拟输出、数字控制或I²C通信的嵌入式系统设计。
关键引脚功能详解
1. 电源与地(VDD, GND)
- VDD:宽电压供电(2.7V~5.5V),典型应用接3.3V或5V。
- 注意:电源噪声敏感,建议并联 0.1μF陶瓷电容 + 10μF电解电容 滤波。
- GND:必须确保低阻抗接地,避免信号干扰。
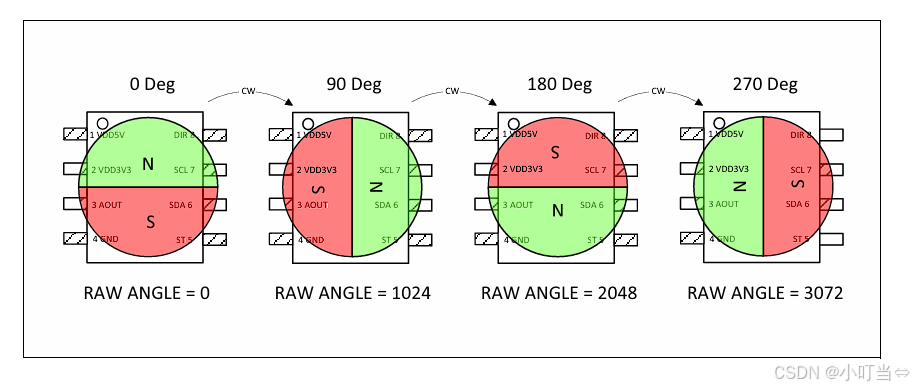
2. 方向控制(DIR)
- 功能:设置角度增量的方向(磁铁旋转方向与角度值变化的关系)。
- 高电平(或悬空):顺时针旋转 → 角度值增加。
- 低电平:逆时针旋转 → 角度值增加。
- 应用:若无需方向控制,可悬空(内部上拉)。
3. 输出模式引脚(PWM/OUT/ABI)
AS5600 提供 三种输出模式,需根据需求选择连接:
- PWM(引脚4):
- 输出占空比与角度成比例的PWM信号(默认频率~1.1kHz)。
- 适用于MCU通过捕获脉冲宽度读取角度(如Arduino的
pulseIn())。
- OUT(引脚5):
- 模拟电压输出(0VDD,线性对应0360°)。
- 需外接ADC(如ESP32的ADC引脚)读取,分辨率受ADC限制。
- ABI(引脚8):
- 增量式编码器输出(A相脉冲,需外接B相信号实现正交编码)。
- 分辨率可通过I2C配置(默认每转12脉冲)。
4. I2C接口(SDA, SCL)
- SDA/SCL:标准I2C通信引脚,支持 400kHz 高速模式。
- 注意:
- 必须外接上拉电阻(典型值4.7kΩ)。
- ESP32等MCU需指定正确引脚(如ESP32默认SDA=21, SCL=22)。
- 注意:
- I2C地址:固定为 0x36(不可更改)。
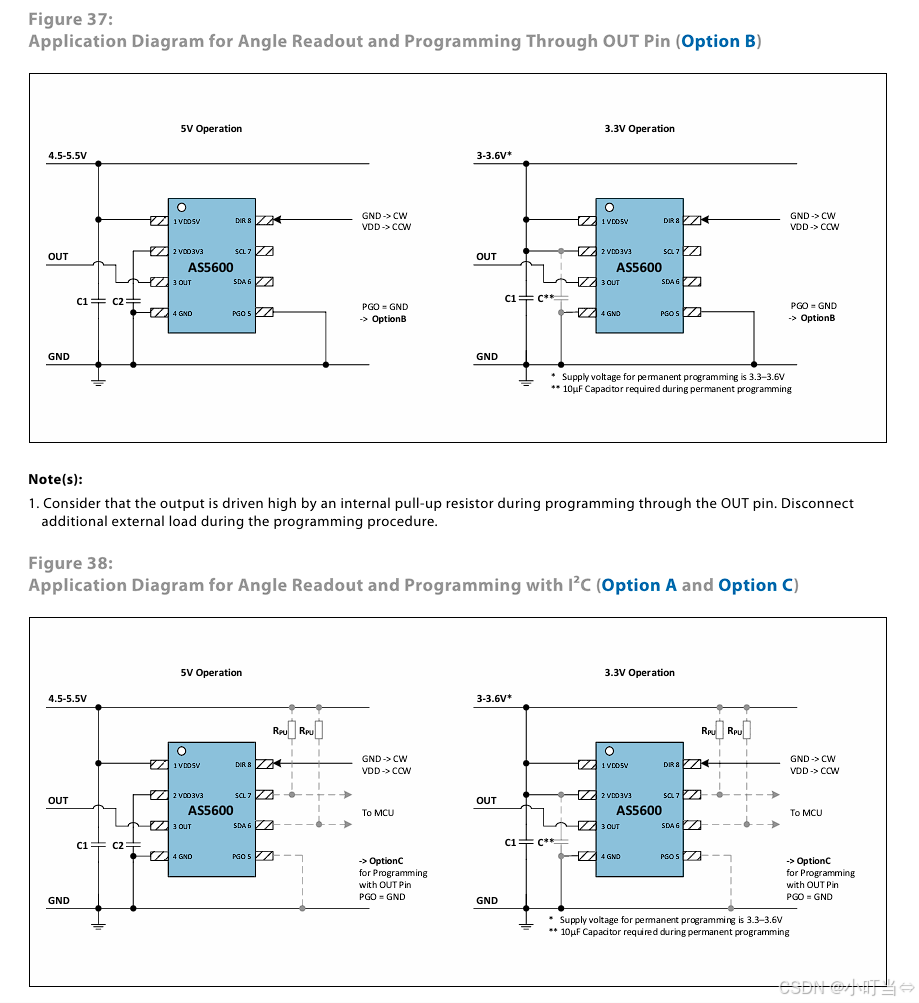
典型连接电路示例
场景1:I2C模式(推荐)
AS5600 ESP32
---------------------------------
VDD → 3.3V (电源)
GND → GND (地)
SDA → GPIO21 (上拉至3.3V via 10kΩ)
SCL → GPIO22 (上拉至3.3V via 10kΩ)
DIR → 悬空或接GPIO (方向控制)
PWM/OUT/ABI → 不接 (仅用I2C时)
场景2:PWM模式(无MCU时)
AS5600 示波器/其他设备
---------------------------------
VDD → 5V
GND → GND
PWM → 信号输入 (测量占空比)
DIR → 悬空 (默认方向)
AS5600 与微控制器(如 Arduino)的连接
AS5600 Pinout → Arduino Connection:
----------------------------------
1 (VDD5V) → 5V (Arduino 5V) + 100nF 电容接地
2 (VDD3V3) → 不接(如果使用 5V 供电)
3 (OUT) → A0(模拟输入)或 D9(PWM 输入)
4 (GND) → GND
5 (PGO) → 悬空(默认)或 GND(编程模式 B)
6 (SDA) → A4(Arduino SDA) + 4.7kΩ 上拉至 VDD
7 (SCL) → A5(Arduino SCL) + 4.7kΩ 上拉至 VDD
8 (DIR) → GND(默认顺时针增加)或 5V(逆时针增加)
3. 引脚配置注意事项
(1) 电源配置
- 5V 模式:使用 VDD5V (Pin 1),并接 100 nF 去耦电容 到 GND。
- 3.3V 模式:使用 VDD3V3 (Pin 2),若在 5V 系统下使用,需额外加 1 μF 电容 稳压。
- 避免同时接 VDD5V 和 VDD3V3,否则可能损坏芯片。
(2) I²C 通信
- SDA 和 SCL 必须接 4.7 kΩ 上拉电阻(典型值,可调整)。
- I²C 默认地址:
0x36,但可通过 PGO 引脚修改(需参考手册)。
(3) 输出模式选择
- OUT (Pin 3) 可配置为:
- 模拟输出(0~VDD 电压,对应 0°~360°)。
- PWM 输出(12-bit 分辨率,占空比对应角度)。
- 需在代码或硬件上选择模式(部分型号需配置寄存器)。
(4) 方向控制 (DIR)
- 默认接 GND(顺时针增加角度值)。
- 接 VDD 时,方向反转(逆时针增加角度值)。
(5) 编程模式 (PGO)
- 悬空或接 VDD = 默认模式(I²C 地址
0x36)。 - 接 GND = 进入编程模式(如更改 I²C 地址)。
4. 常见问题
Q1: 如何读取 AS5600 的角度?
- 模拟模式:用 ADC 读取 OUT 引脚电压(0~VDD 对应 0°~360°)。
- PWM 模式:测量 PWM 占空比(如 Arduino
pulseIn())。 - I²C 模式:读取寄存器
0x0C(高字节)和0x0D(低字节)。
Q2: I²C 无法通信怎么办?
- 检查 SDA/SCL 是否上拉(4.7kΩ)。
- 确认地址是否正确(默认
0x36)。 - 确保电源稳定(VDD 和 GND 连接正确)。
Q3: 输出信号不稳定?
- 检查 去耦电容(100nF 是否靠近 VDD5V?)。
- 确保 磁铁距离合适(AS5600 需在 0~2mm 范围内)。

















 32
32

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









