







一、相机参数介绍
1.1 相机内参矩阵
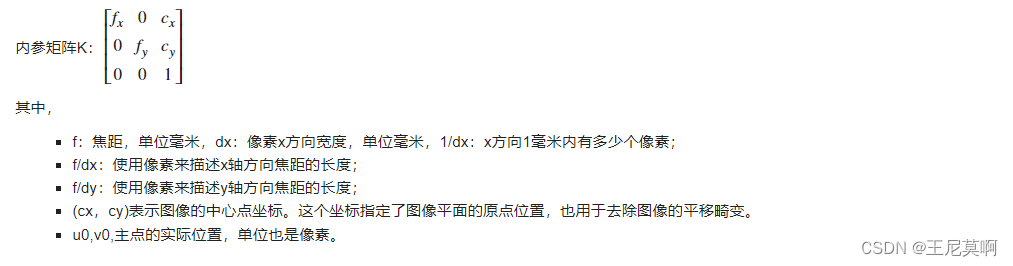
概念:内参矩阵用于描述相机的内部参数,它包含了相机的焦距、主点坐标和图像的畸变等信息。内参矩阵的形式通常为一个3x3的矩阵,常用表示为K。内参矩阵可以将相机坐标系中的三维点映射到图像平面上的二维像素坐标。通过内参矩阵,我们可以进行相机标定、图像校正和三维点云到图像的投影等操作。
标定后的相机内参矩阵为3x3矩阵: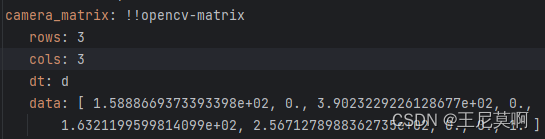
相机标定参照:【鱼眼+普通相机】相机标定。
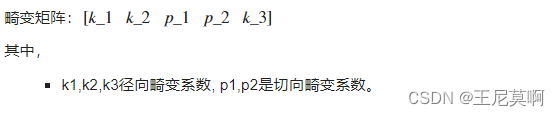
1.2 相机畸变矩阵
普通工业相机畸变矩阵为1x5矩阵: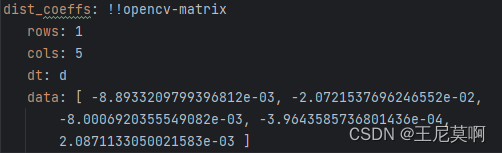
1.3 相机外参矩阵
外参矩阵用于
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 11万+
11万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









