







 本文详细介绍了数据流分析的基础,包括迭代算法的视角、偏序集的概念、上界与下界、格的类型以及全格。通过格理论,阐述了不动点定理在数据流分析中的应用,特别是如何关联迭代算法与不动点定理,确保算法能到达不动点。此外,文章还探讨了May和Must分析的差异,以及常量传播和工作列表算法的优化。
本文详细介绍了数据流分析的基础,包括迭代算法的视角、偏序集的概念、上界与下界、格的类型以及全格。通过格理论,阐述了不动点定理在数据流分析中的应用,特别是如何关联迭代算法与不动点定理,确保算法能到达不动点。此外,文章还探讨了May和Must分析的差异,以及常量传播和工作列表算法的优化。
🔗 课程链接:李樾老师和谭天老师的:
南京大学《软件分析》课程05(Data Flow Analysis - Foundations I)_哔哩哔哩_bilibili
目录
4.1 从另一个视角看迭代算法(Iterative Algorithm)
4.1.1 回顾 May&Forward Analysis 的迭代算法
4.3 上界和下界(Upper and Lower Bounds)
4.4.3 全格(Complete Lattice)⭐==》 top and bottom
4.6.2 不动点定理 Fixed-Point Theorem
4.8 从Lattice的视角看 May/ Must 分析⭐⭐
4.9 Distributivity(分配性) and MOP
4.10 Constant Propagation 常量传播
4.11 Worklist 算法,一种迭代算法的优化(更常用)
第四章 数据流分析——基础
4.1 从另一个视角看迭代算法(Iterative Algorithm)
4.1.1 回顾 May&Forward Analysis 的迭代算法
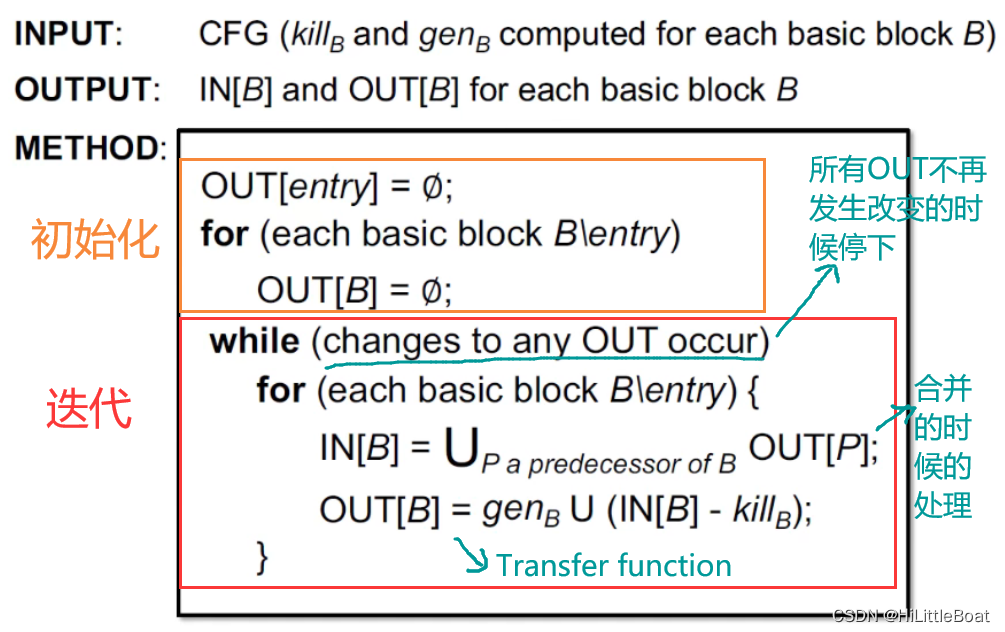
首先来回顾一下上一章节里介绍的Reaching Definitions的算法,是may analysis,正向传播,如下图所示:
4.1.2 从另一视角看迭代算法
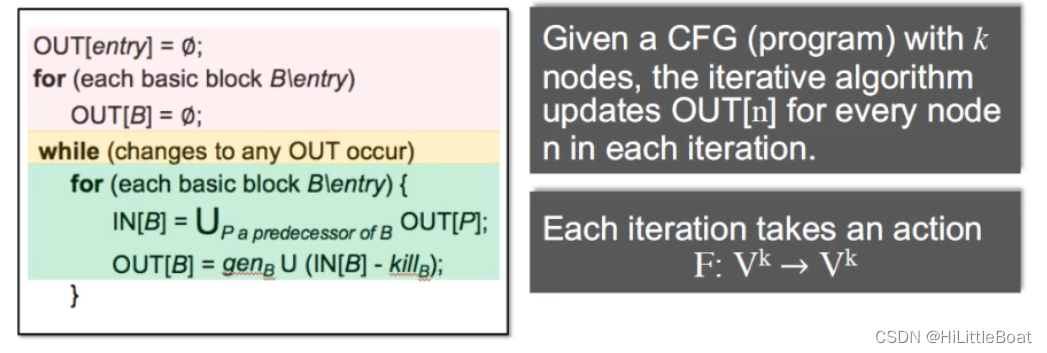
1. 接下来,我们从数学的视角来看迭代算法,文字定义如下:
- 给定一个具有k个节点的CFG,迭代算法对每次迭代中的每个节点n更新OUT[n];
- 假设数据流分析中的值域(domain)为V,那么我们可以定义一个k元组(k-tuple)以保存每次迭代后的分析值。
- 这个k元组 内容为
表示为
, 记作
- 例如说Reaching definitions分析中,值域V就是所有程序中的definitions,有了这个值域,我们就可以定义k元组:k对应k个节点,然后k元组的值域就是每个节点的OUT值,每个OUT值对应的就是1个V,所以k元组对应的值域就是V的product,也就是(V1 × V2 ... × Vk),记为V的k次方。
- 这个k元组 内容为
- 每一次迭代都可以看作是一个动作:通过应用传递函数和控制流处理,将
的元素映射为
。
- 然后,该算法以迭代的方式输出一系列k元组,直到k元组与最后一个连续迭代的k元组相同。
2. 下一步,我们用具体的例子和符号来进一步理解上边的文字,:
如下图所示的分析流程的代码
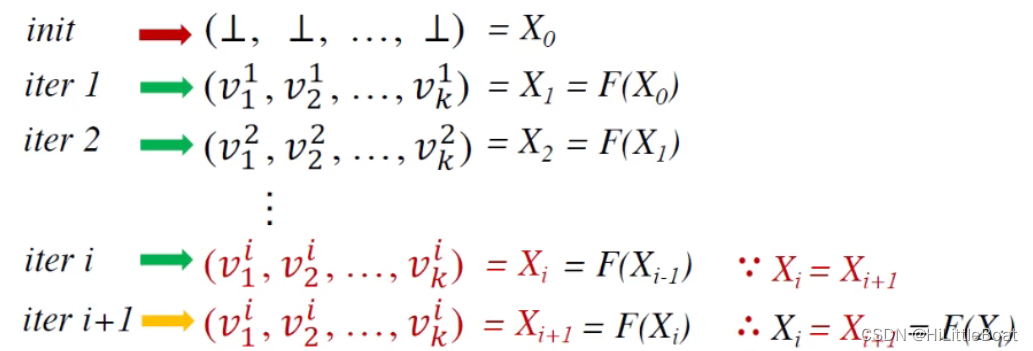
我们用符号来表示每一次迭代如下图所示:
将其做了批注如下图所示: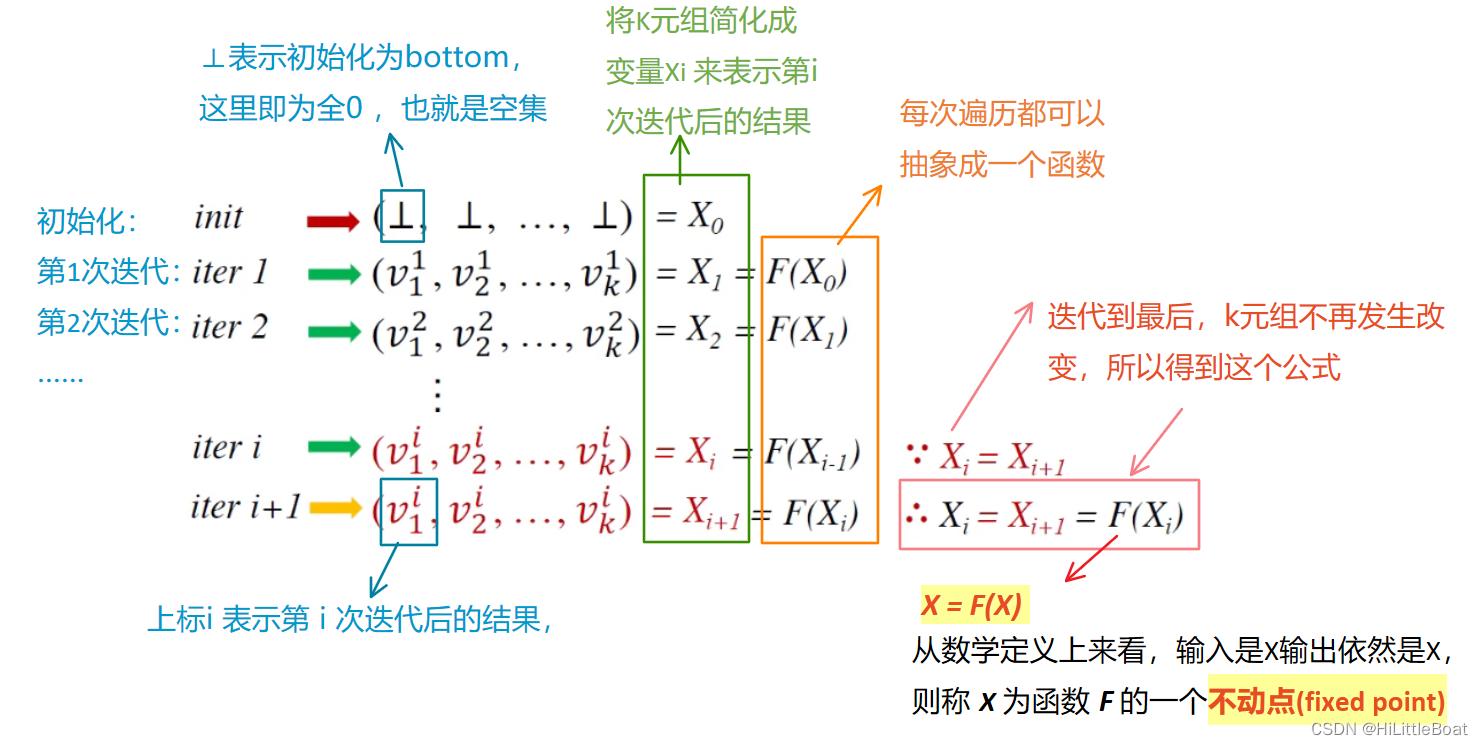
所以根据这个例子来看,可以很直观地看出,最后达到了不动点(fixed point),理解了这个过程,会对我们后续理解不动点定理,非常有帮助。
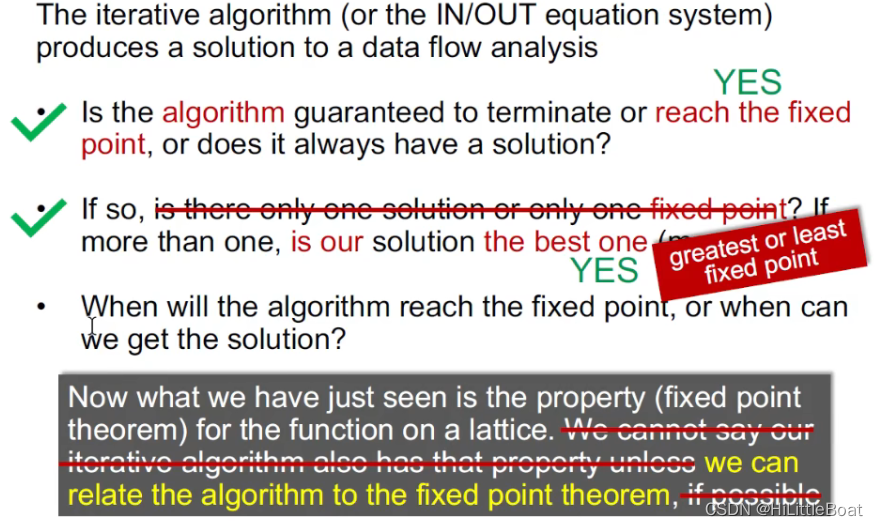
3. 关于这个不动点,这个X = F(X) 数学表达形式,提出三个问题:
- 算法是否一定会终止或到达不动点,或者说一定会给数据流分析一个解决方案?
- 如果可以,那么是否只有一个解决方案或不动点?如果不止一个,我们的方案是否是最好最精确的?
- 算法何时到达不动点,或者说我们何时得到解决方案?
为了回答这三个问题,我们需要先学习一些数学知识:
4.2 偏序(Partial Order)
从这节开始,是很多离散数学方面的知识点,如果离散忘掉了或者还不是很懂,一定还是要好好看的,这里的所有数学知识,后续都会用到。
1. 定义
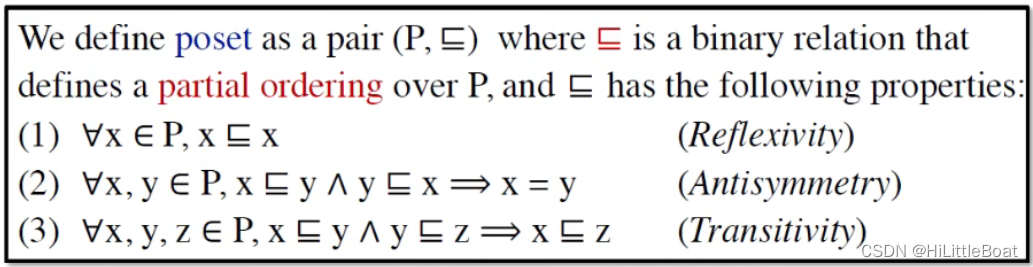
意思就是:我们定义一个偏序集(poset)为一个对(P, ⊑),其中二元关系符⊑定义了在数据集P上一种偏序关系,并且⊑拥有以下3个性质:
- ∀ x ∈ P, x ⊑ x(自反性,Reflexivity)
- ∀x, y ∈ P, x ⊑ y ∧ y ⊑ x ⟹ x = y (反对称性,Antisymmetry)
- ∀x, y, z ∈ P, x ⊑ y ∧ y ⊑ z ⟹ x ⊑ z(传递性, Transitivity)
如果⊑满足这三个性子,就说明构成一个偏序集。
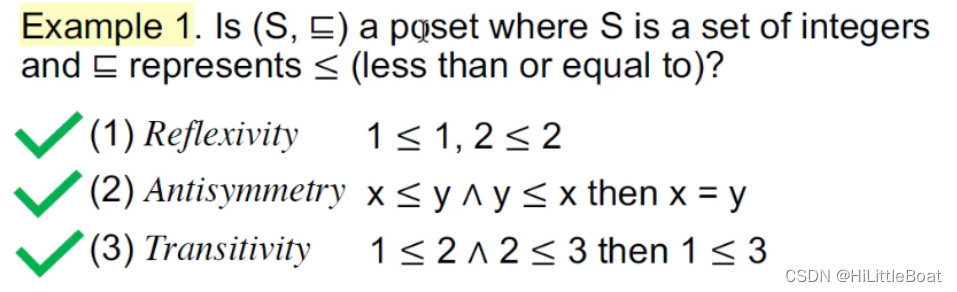
2. 举个例子
① 整数集上的小于等于关系≤ ,满足这三个性质,所以是偏序关系
② 整数集上的小于关系<,不满足自反性,所以不是偏序关系

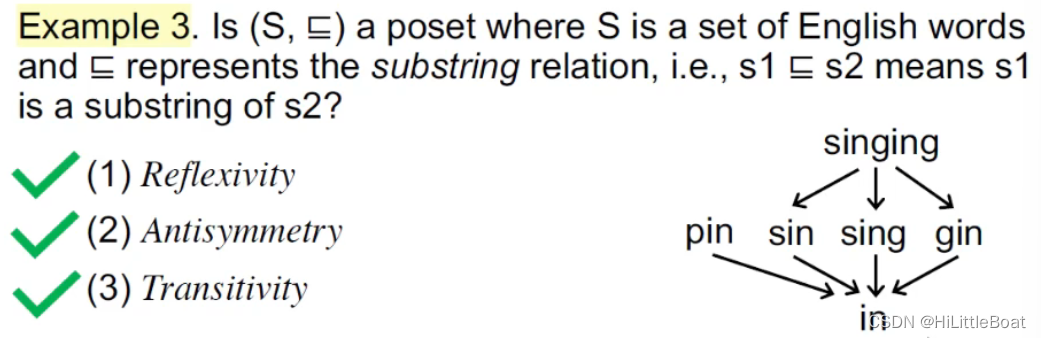
③ 英文字符串中的子串关系,是偏序关系
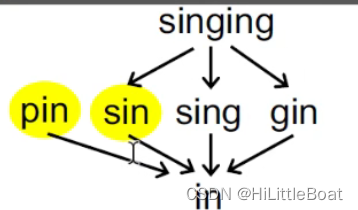
3. 进一步理解偏序
但是其实如例3中的 pin 和sin ,他们之间就没有这个子串关系,但是这并不妨碍定义的正确。实际上,偏序(partial)为什么不叫全序呢,可以这么理解,对于集合P中的一对集合元素来说,它们也可以是incomparable(不互相比较)的;换句话说,并不是P中的每对元素都必须满足偏序关系。
再举个例子:
④ 子集关系⊆ 也是偏序关系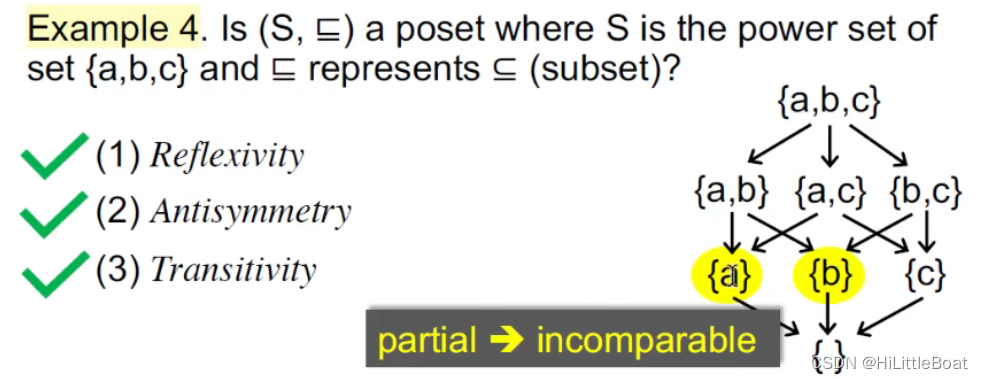
上边这个图要记住,后续会经常拿出来用。在后续的内容离,可以将偏序关系粗略地理解为小于等于关系,这样方便理解,而且基本上不影响证明含义。
4.3 上界和下界(Upper and Lower Bounds)
1. 定义
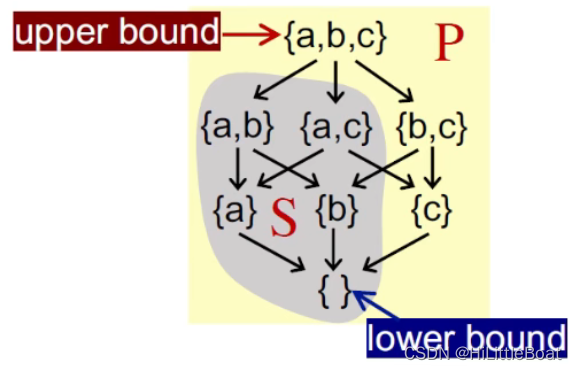
① 给定偏序集(P, ⊑)及子集S,满足S⊆P,则有
- 若∀x ∈ S, x ⊑ u,那么u ∈ P是子集S的上界 upper bound
- 若∀x ∈ S, l ⊑ x,那么 l ∈ P是子集S的下界 lower bound
如下图所示,灰色区域S即为P的一个子集,其上界和下界分别是{a,b,c} 和 {}
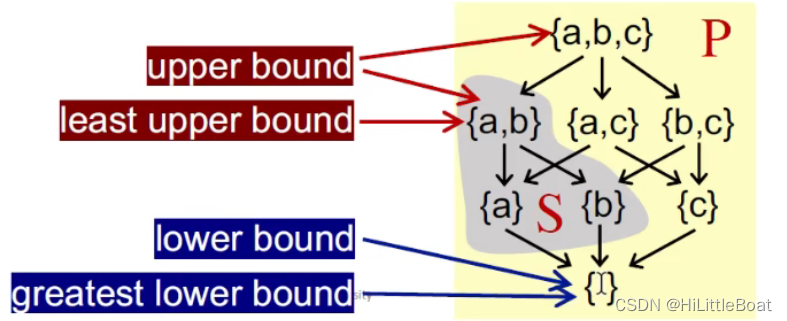
因为上界和下界可以不只是1个,所以有了如下概念:
② 最小上界⊔S(lub / join)和最大下界⊓S(glb / meet):
- 如果对每一个S的上界,都有⊔S⊑ u,则称其为最小上界(least upper bound, 简称lub or join)记作⊔S
- 如果对每一个S的下界,都有 l ⊑⊓S,则称其为最大下界(greatest lower bound, 简称glb or meet)记作⊓S
如下图所示,最小上界、最大下界
③ 通常来说,如果S仅包含两个元素a, b (S={a, b}),那么:
- ⊔S能被写作 a ⊔ b (a join b)
- ⊓S能被写作 a ⊓ b (a meet b)
2. 性质
- 并不是所有偏序集都有最小上界和最大下界
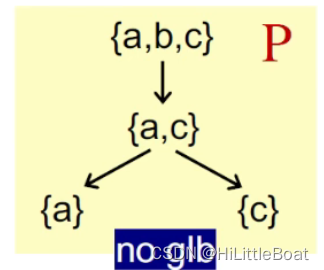
- 如果有最小上界或者最小下界,则是唯一的
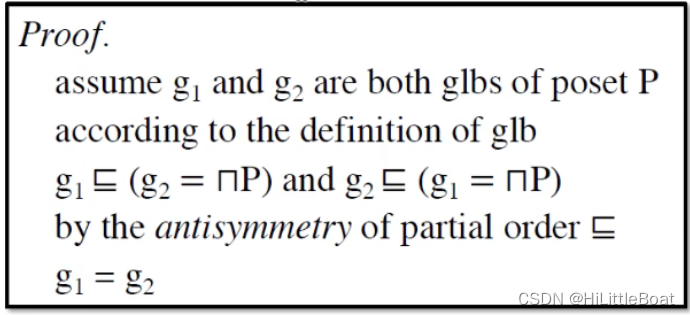
证明:
假设有两个最小上界,根据反对称性,这两个上界是相同的
4.4 格, 半格,全格,乘积格
4.4.1 格(Lattice)⭐
1. 定义
给定一个偏序集(P,⊑ ),对 ∀ a, b∈P,如果a ⊔ b和a ⊓ b都存在,则这个偏序集(P,⊑)称为一个格(Lattice)。
“格” 可能是描述这种上下都有边界的抽象格子
2. 例子:
① 小于等于关系≤ 是“格”吗?—— 是的,因为⊔就是max,⊓就是min,且都存在
② 英文字符串中的子串关系是格吗?——不是。

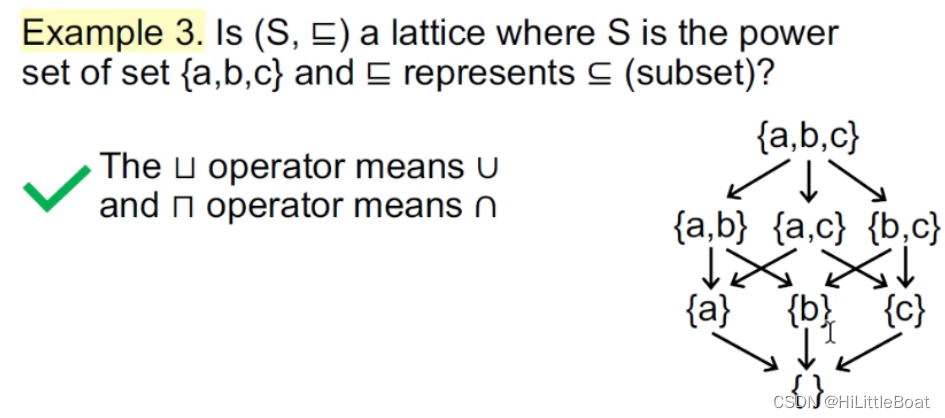
③ 子集关系,是格吗?—— 是。join 就是∪,meet就是∩
4.4.2 半格(Semilattice)
1. 定义
给定一个偏序集(P,⊑ ),对 ∀ a, b∈P,
- 如果只有 a ⊔ b 存在,则称偏序集为一个join semilattice
- 如果只有 a ⊓ b 存在,则称偏序集为一个meet semilattice
4.4.3 全格(Complete Lattice)⭐==》 top and bottom
1. 定义
给定一个Lattice格 (P,⊑ ),对于P的任意子集S,如果集合S的最小上界⊔S和最大下界⊓S都存在,则(P,⊑)称为一个全格(Complete Lattice)。
格是说任意两个元素之间,而全格是说任意两个子集之间
“全格”可能是在描述一个完整的格,而每个子格,都是一个格。
2. 例子
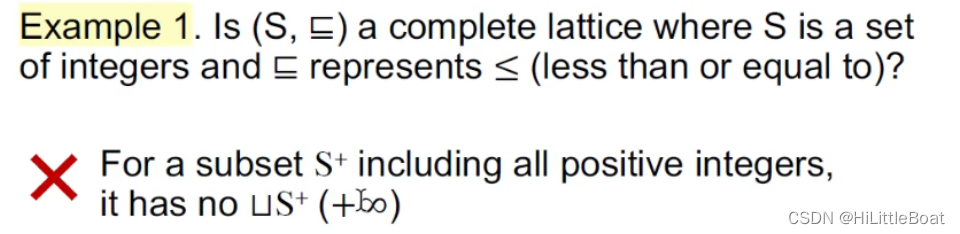
① 小于等于关系≤ 是全格吗?—— 不是全格,假如说子集S包含所有正整数,它就没有上界(+∞),但是是格,因为任意两个元素,室友上下的。
② 子集关系,是全格吗?——是!
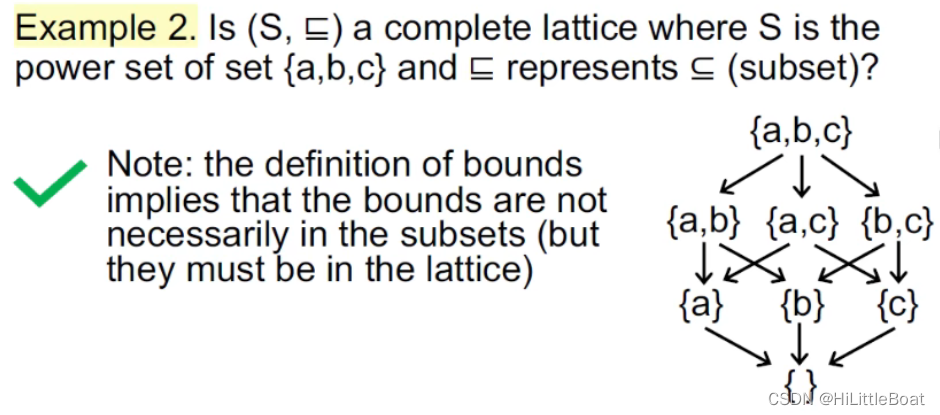
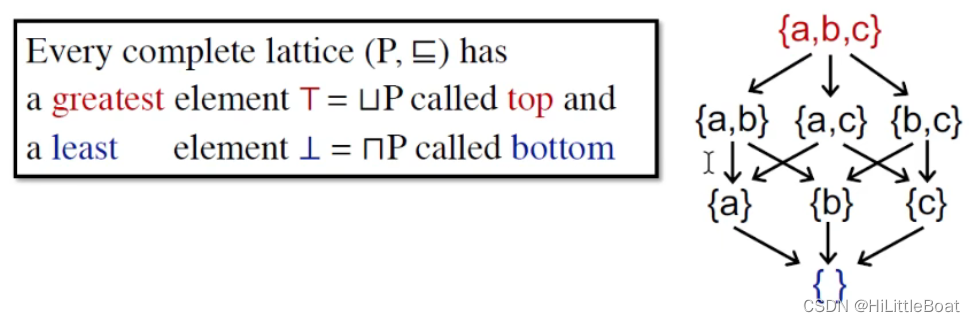
3. 引入两个重要概念:top和bottom ⭐
对每一个全格 (P,⊑ ),都有
- 一个最大(greatest)的元素 ⊤ = ⊔ P, 称为 top
- 一个最小(least) 的元素 ⊥= ⊓ P ,称为 bottom
如下图,还是这个子集的经典例子,top就是{a,b,c},bottom为{}
4. 性质
任意有穷(finite)的lattice格,都是complete lattice全格
注意:反过来说,全格一定是有穷的吗?
——不一定,比如说,0和1之间,所有的实数的小于等于关系,虽然有边界,但是是无穷的
在数据分析中,基本上用到的都是finite 也是 complete的,即 有穷的全格
4.4.4 乘积格(Product Lattice)
1. 定义
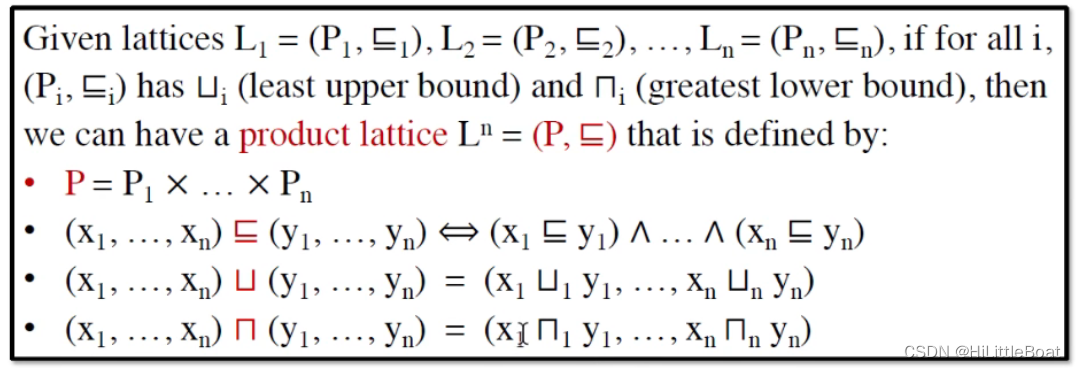
意思就是:给定n个lattice,L1 = (P1, ⊑1), L2 = (P2, ⊑2), …, Ln = (Pn, ⊑n),如果每个lattice都存在对应的⊔i(最小上界)和⊓i(最大下界),那么我们得到一个Product Lattice(乘积格) Ln = (P, ⊑)(n是上标,代表n个lattice的乘积 ),可以有如下定义:
- P = P1 × … × Pn (集合域)
- (x1, …, xn) ⊑ (y1, …, yn) ⟺ (x1 ⊑ y1) ∧ … ∧ (xn ⊑ yn) (偏序关系)
- (x1, …, xn) ⊔ (y1, …, yn) = (x1 ⊔1 y1, …, xn ⊔n yn) (最小上界)
- (x1, …, xn) ⊓ (y1, …, yn) = (x1 ⊓1 y1, …, xn ⊓n yn) (最大下界,乘积格任意两个元素的最大下界,就是每个格的两个元素的最大下界)
2. 性质
- 乘积格也是格
- 如果构成L的是一系列complete lattice(全格)的乘积,那么L也是complete lattice。
4.5 基于格的数据流分析框架
有了上述数学的基础,就可以正式进入到数据流分析的理论部分。
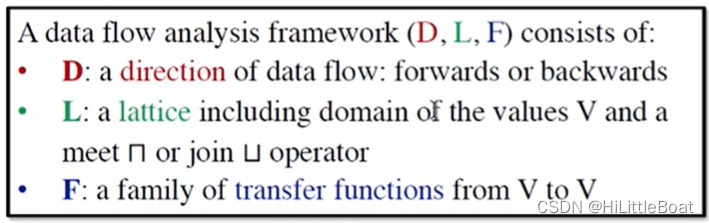
1. 数据流分析主要由三个部分组成(D, L, F)
- D: 数据流的方向(direction):forwards 或 backwards
- L: 包含值域V和一个meet ⊓ 或 join ⊔ 操作符的格(lattice)
- F: 一系列值域V到V的转换函数(transfer funtion)
如下图所示,左边是一个may分析的某一步骤,可以看出分析的过程其实就是右侧的,从bottom 往上走的过程。
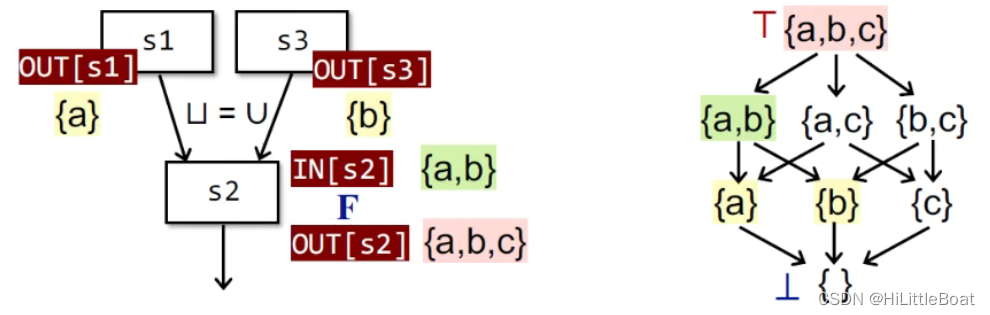
所以,数据流分析可以被看做是迭代地在格上使用转换函数和meet/join操作。
2. 再来回顾一下我们之前提出的一些问题:
- 算法一定能停止或者一定可以达到不动点吗?或者说总有一个解吗?
——回忆“OUT never shrinks” ,这与单调性有关
- 如果一定会停下,那会由多个不动点吗?如果会有多个,那我们的不动点是最精确的吗?
- 什么时候算法可以达到不动点?
由此,我们需要学习单调性与不动点定理,非常重要
4.6 单调性与不动点定理⭐
4.6.1 单调性 Monotonicity
定义:如果对于 ∀ x, y ∈ L,x ⊑ y ⟹ f(x) ⊑ f(y),函数 f:L->L (L是一个格)是单调的。
4.6.2 不动点定理 Fixed-Point Theorem
定义:对于全格 (L, ⊑),如果
1)f: L->L是单调的
2)L是有限的,
则 f 的最小不动点(least fixed point)可以通过迭代f(⊥), f(f(⊥)), …, (⊥) 来获得。
最大不动点(greatest fixed point)可以通过迭代f(T), f(f(T)), …, (T) 来获得。
注意:对于 may analysis ,它是从 bottom 向 top 变化的,不动点原理告诉我们从 ⊥ 出发不断的迭代函数 f ,最后得到的不动点是最小不动点,也就是最优的一个不动点。对于 may analysis ,它一定存在一个最大的不动点 T,在前面的示例中为 11111…111。must analysis 刚好相反,它一定存在一个最小的不动点 ⊥,在前面的示例中为 0000…000。
4.6.3 不动点定理的证明
这里,我们需要证明两点:
(1)不动点是存在的 (2)不动点是最小的
1. 不动点证明的存在性 Existence of Fixed Point
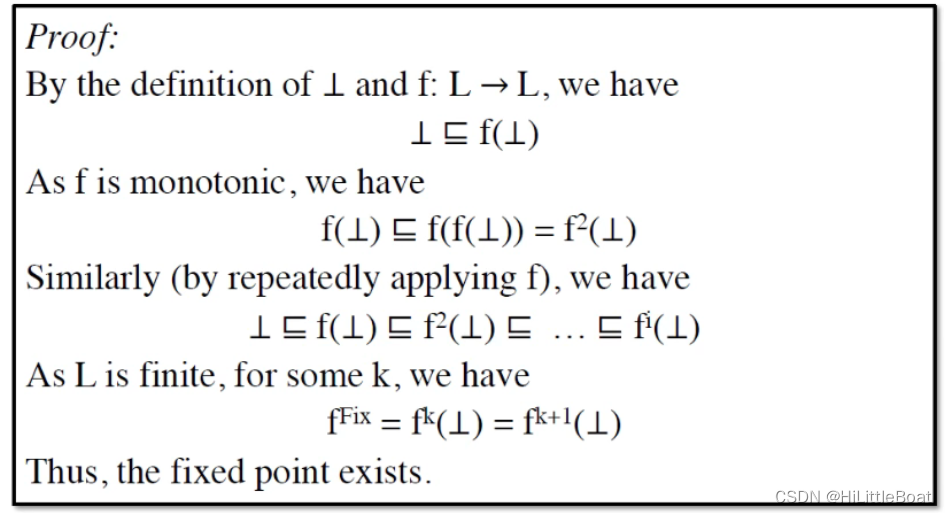
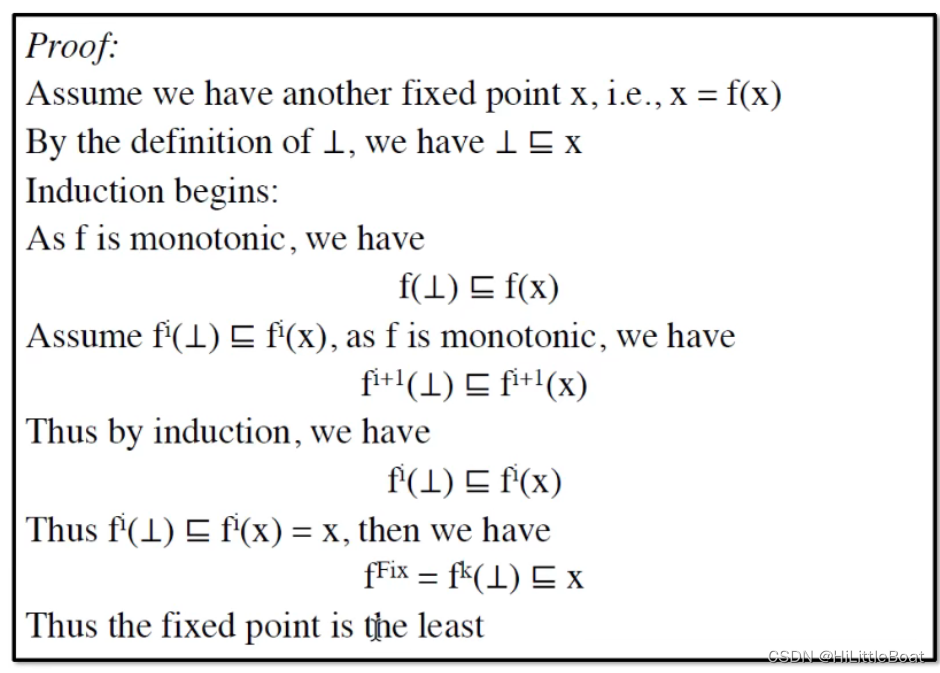
2. 不动点是最小的 Least Fixed Point
4.6.4 回顾之前提出的一些问题:
- 算法一定能停止或者一定可以达到不动点吗?或者说总有一个解吗?
——回忆“OUT never shrinks” ,这与单调性有关,会达到不动点
- 如果一定会停下,那会由多个不动点吗?如果会有多个,那我们的不动点是最精确的吗?
——对于一个函数来讲,只要满足 x = f(x) 即可称 x 为不动点,所以不动点并不唯一。目前我们知道的是根据不动点原理得到的不动点是最优的,但是并不不知道,迭代算法是否满足不动点定理。
- 什么时候算法可以达到不动点?
4.7 关联迭代算法与不动点定理
在上一小节中,我们证明了不动点定理,但是那是纯数学上的一个关于lattice中的函数的一个性质,是针对单个偏序集和单个传递函数的定理,对应到CFG中,就是针对单个节点(一个块B)的。因此我们不能直接说我们的迭代算法也有这个属性,除非我们能将算法与不动点定理关联起来。
本小节中,就是要将不动点定理与整个迭代算法关联起来,或者说将其与整个数据流分析关联起来。
1. 关联已知条件
如下图所示,我们将迭代算法与不动点定理的已知条件关联起来。
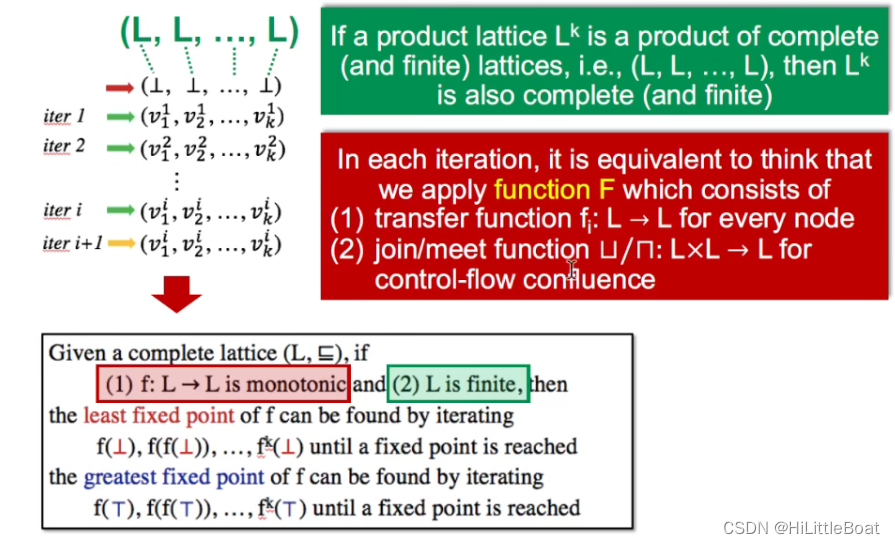
绿色部分的意思是:
- 每一个节点就对应一个lattice,整个CFG的域就是product lattice,又因为product lattice也是lattice,所以,整个CFG的域也是一个lattice,
- 并且如果构成L的是一系列complete lattice(全格)的乘积,那么L也是complete(and finite),所以整个CFG的域的lattice 也是finite的
红色部分:
- 在每次迭代中,我们所应用的行为定义为一个函数 function F ,可以包含两个部分:
- (1) 转换函数transfer function
for every nodes
- (2) 每次控制流汇合的 join/meet function。
- (1) 转换函数transfer function
- 接下来要证明的就是:这个function F 是单调的(monotonic)
- (1) 转换函数transfer function
- 在这个转换函数中,使用到的是 gen 和 kill 是单调的(这个函数设计的时候,本身就是单调的,因为经过操作,只会让某元素从0变成1 ,而不会从1变成0)
- (2) join/meet function ⊔/ ⊓ : L × L → L for control-flow confluence (这里将很多个L的合并操作看作一次,这里我们只需要证明这个二元关系的join或meet操作时单调的即可)
- 这里有一些很严谨的步骤来证明⊔是单调的,如下图所示
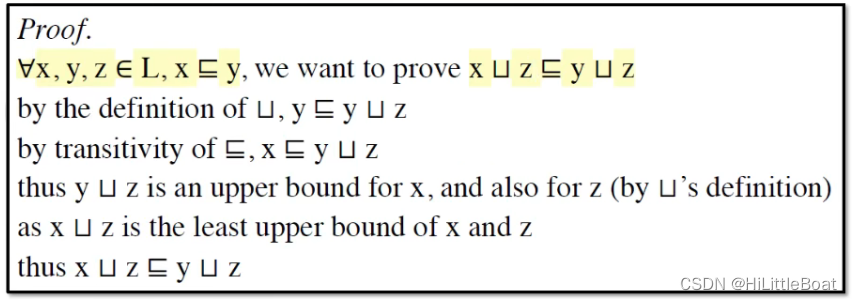
- 前三行是很容易理解的,利用偏序关系的传递性,得到y ⊔ z 是y的上界也是x的上界;
- 又因为 x ⊔ z 是x 和z 的最小上界,根据最小上界定义,可以得到x ⊔ z ⊑ y ⊔ z
- 这里有一些很严谨的步骤来证明⊔是单调的,如下图所示
- (1) 转换函数transfer function

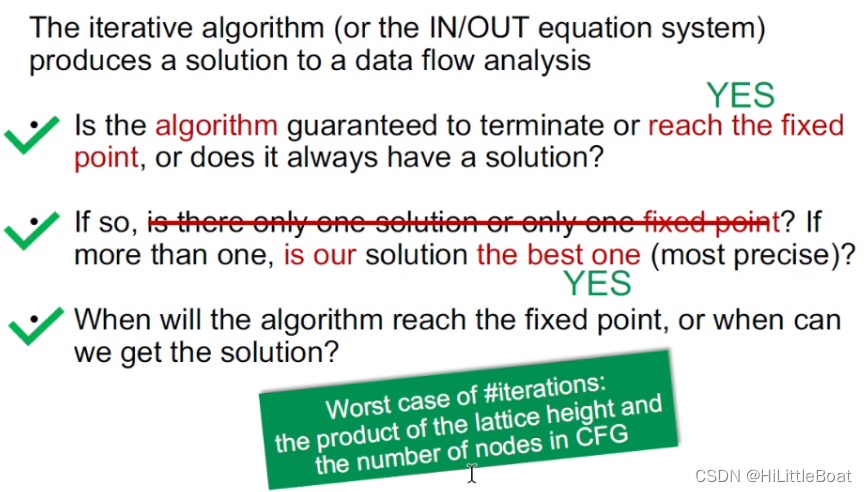
2. 回顾提出的问题
由此,我们就可以回答前两个问题了,算法一定能够达到不动点,要么是最大不动点,且一定是best one,要么是最小不动点,要么是最小不动点(待会还会去系统地理解什么是best)
还剩下一个问题就是到底什么时候能够达到不动点,实际上是在探讨算法的复杂度,最次多少次迭代可以达到不动点。
3. 什么时候算法到达不动点?
如下图所示,lattice的从top到bottom的路径长度为高度h,假设CFG中的节点数为k,最坏情况下,每一步只改变了一个node里的一个0,则最坏情况下,需要迭代 i=h*k 次才能到达不动点。(其中高度h可以理解为有多少个需要分析的变量/定义等,也就是多少位字节表示。)
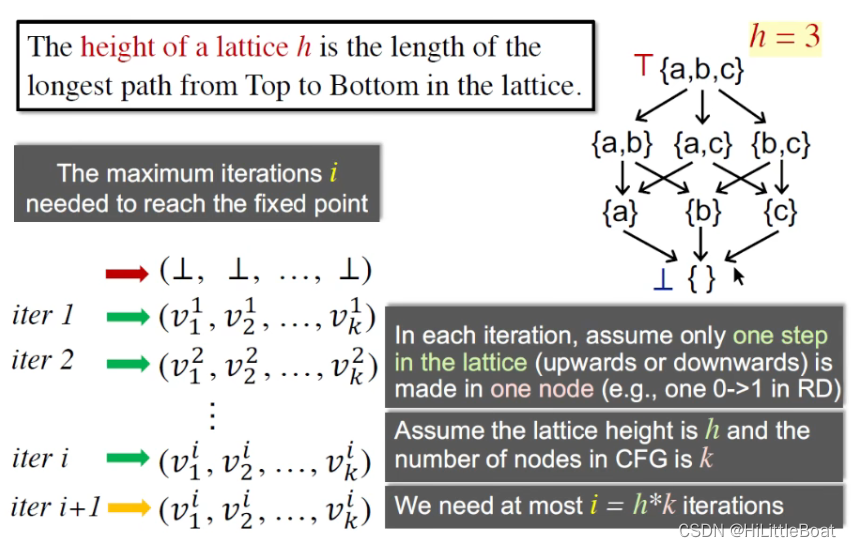
所以,这里就可以算出来最坏情况下的迭代次数,就是路径的长度与CFG中节点个数的乘积
4.8 从Lattice的视角看 May/ Must 分析⭐⭐
这节的图都非常重要,方便以后用到的时候查阅。
4.8.1 总体映射
首先将左侧的图,映射到右侧的椭圆中,假设我们设的这个格是我们之前所介绍的乘积格,但是我们仍把他当成一个格来处理
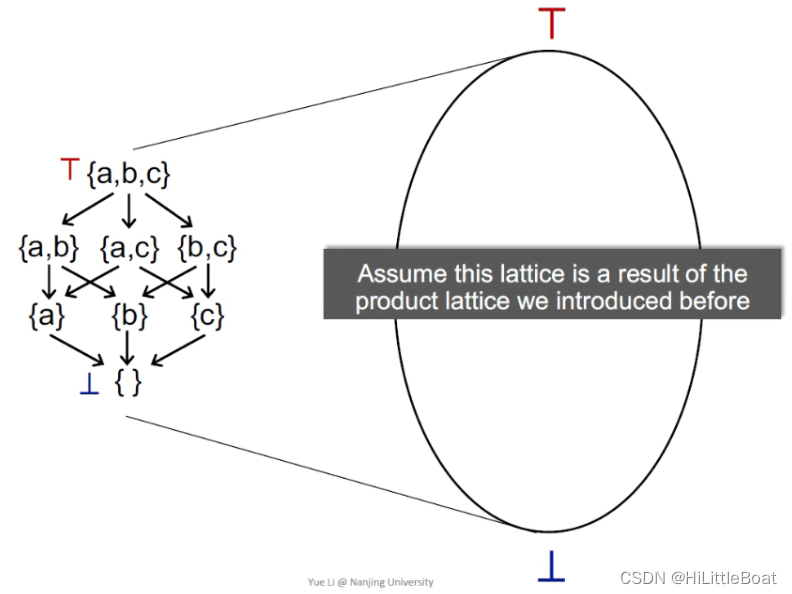
其实不管是must 还是may,都是从一个不安全的状态,一步步迭代,到达最安全的状态,只不过,不同的分析,起始可能不一样,具体分析如下。
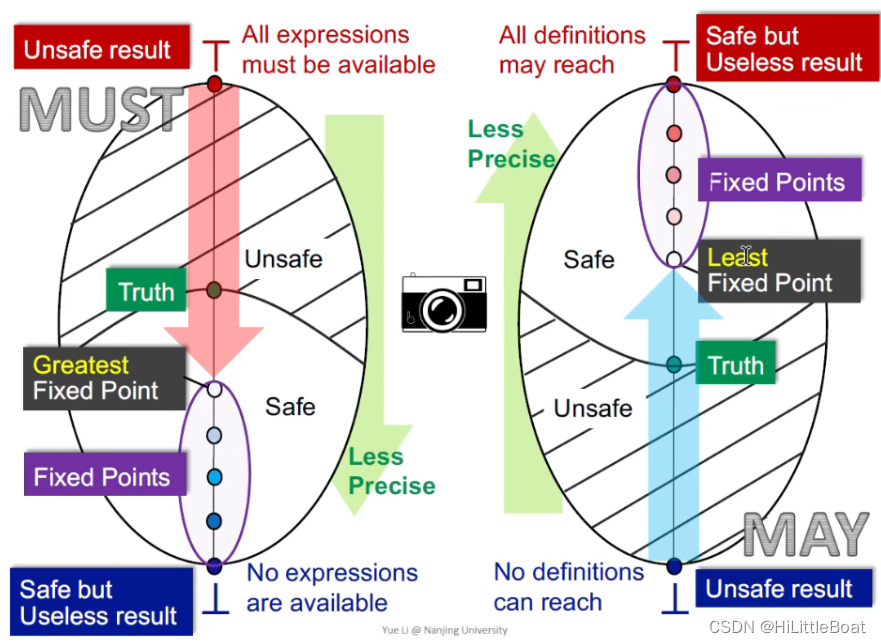
4.8.2 MAY 分析
对于may analysis,目的是查错,bottom 就是初始的unsafe状态,也就是说,所有的都没错,这显然分析结果是不安全的,而top则是所有的都可能有错,这显然分析很安全,但是也没什么用。
如下图所示,以可达性分析为例:
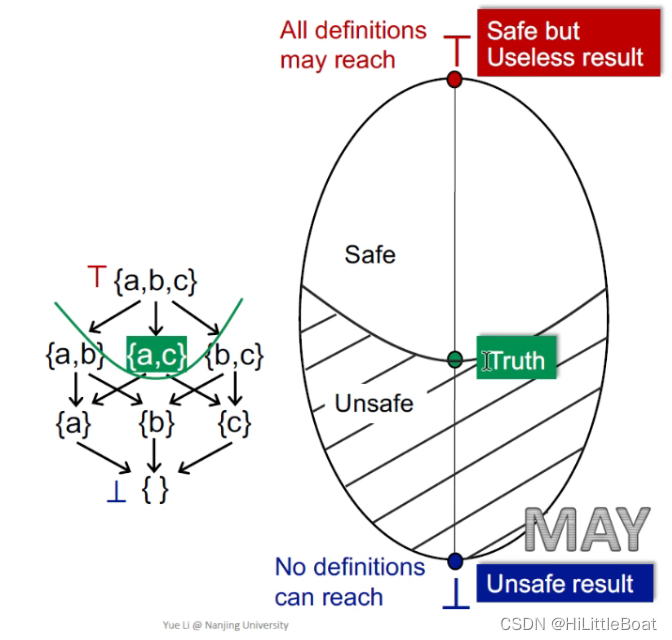
- bottom就是全0,意味着,所有的定义都不可达,这是一个不安全的结论,(因为这个分析的应用目的是为了查错,查看变量是否需要初始化。首先在Entry中给每个变量一个假定义,标记所有变量为都为未初始化状态,bottom表示所有的假定义都无法到达,说明所有变量在中间都进行了赋值,那就不需要对任何变量进行初始化,这是不安全的,可能导致未初始化错误)
- top就是all dummy definition may reach。从查错角度来说,需要对每个变量都进行初始化,这显然非常安全,但是没有什么用!
- Truth代表最准确的验证结果,假设{a,c}是truth,那么包括其以上的都是safe的,以下的都是unsafe,如图中的阴影和非阴影。
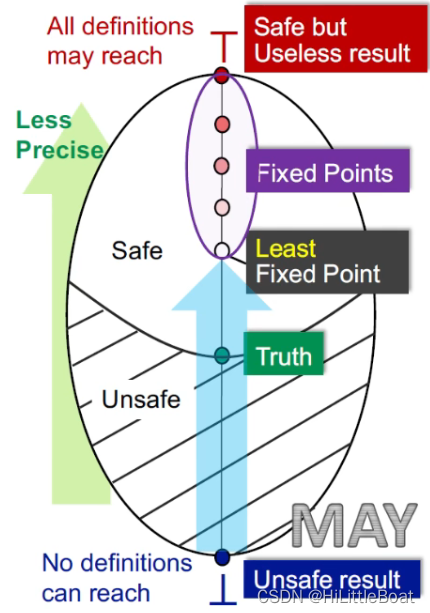
所以,对于may analysis而言,从unsafe → safe 的路径就是从 bottom → top。因为函数是单调的,所以经过一次次迭代,算法会停在safe中最接近truth的不动点,即最小不动点(Least Fixed Point)。
4.8.3 MUST 分析
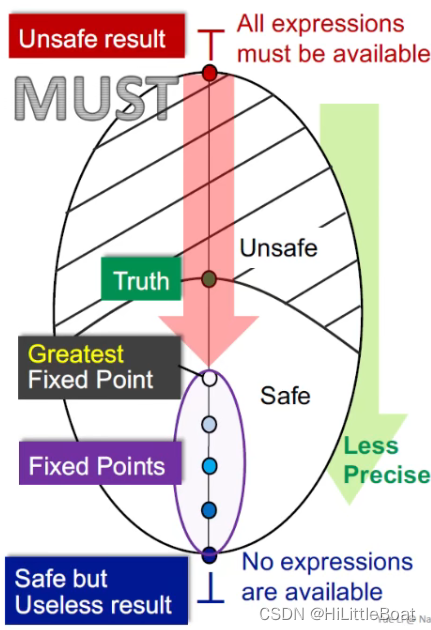
对于must analysis,目的是优化,top是初始的unsafe状态,意味着所有的都能优化,这显然不安全,bottom 则是safe的,也就是说,所有的都不能被优化,这显然分析很安全,但是也没什么用。
所以,对于must analysis而言,从unsafe → safe 的路径就是从top→ bottom 。因为函数是单调的,所以经过一次次迭代,算法会停在safe中最接近truth的不动点,即最大不动点(Greatest Fixed Point)。
4.8.4 精华图,截图保存⭐
4.9 Distributivity(分配性) and MOP
我们前边提到了精度,但是我们的精度到底怎么样?谈到分析精度,这里介绍一些很经典的概念,Meet-Over-All-Paths Solution(MOP),可以用来衡量迭代算法的精度
4.9.1 MOP的基本概念
目的:衡量迭代算法的精度
概念:Meet-Over-All-Paths Solution(MOP),就是所有路径在汇聚到一点的时候,把结果meet或join(meet是用来求最大下届,join是求最小上界,名字中只用meet 来代表 meet 和join 两种合并操作)
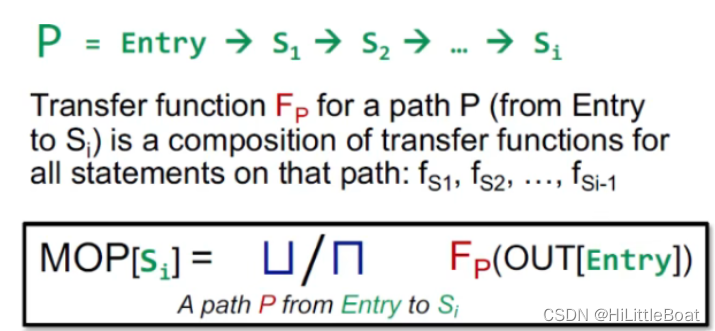
具体来看,如下图所示:
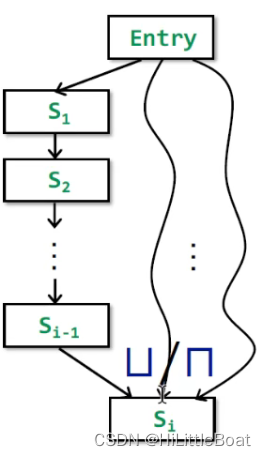
这里有几个概念:
- 路径P: 代表CFG上,从Entry到Si 节点的一条路径
- 路径P上的转换函数Fp: 代表路径P上所有语句的转移函数的组合fs1,fs2,... ,fsi-1,从而构成Fp
- MOP[si]:表示从Entry节点到Si节点上的所有路径P应用转换函数Fp之后再进行meet操作(控制流处理)。本质是求这些值的最小上界/最大下界。
MOP计算每个路径末端的数据流值,并对这些值应用join/meet运算符,以找到它们的lub/glb。(lub是最小上界,glb是最大下界,详见4.3)。
MOP准确性:
- 实际上,有些路径可能不会被执行,在某些路径不执行的情况下仍进行控制流处理是不精确的,not executable → not fully precise
- 若路径包含循环,或者路径爆炸,所以实操性不高,只能作为理论的一种衡量方式。
not enumberable → impractical
4.9.2 Ours(迭代算法) vs. MOP
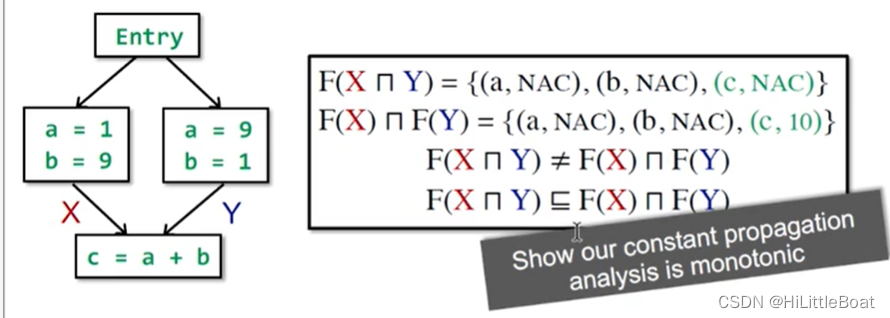
如下图所示,我们的方法是在所有的merge的地方,都进行控制流合并操作,但是MOP是在路径算完之后,对每条路径进行merge。
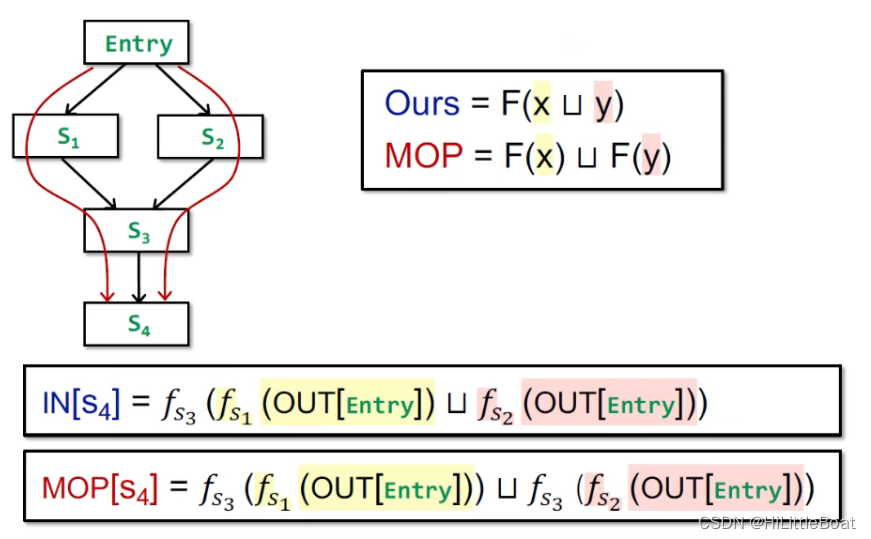
观察这两种方法,可以找到两部分相同的元素,黄色部分用x代替,红色部分用y代替。可以抽象出两种方法的结论,如图右上方所示。接下来,我们将分析两者之间的关系。
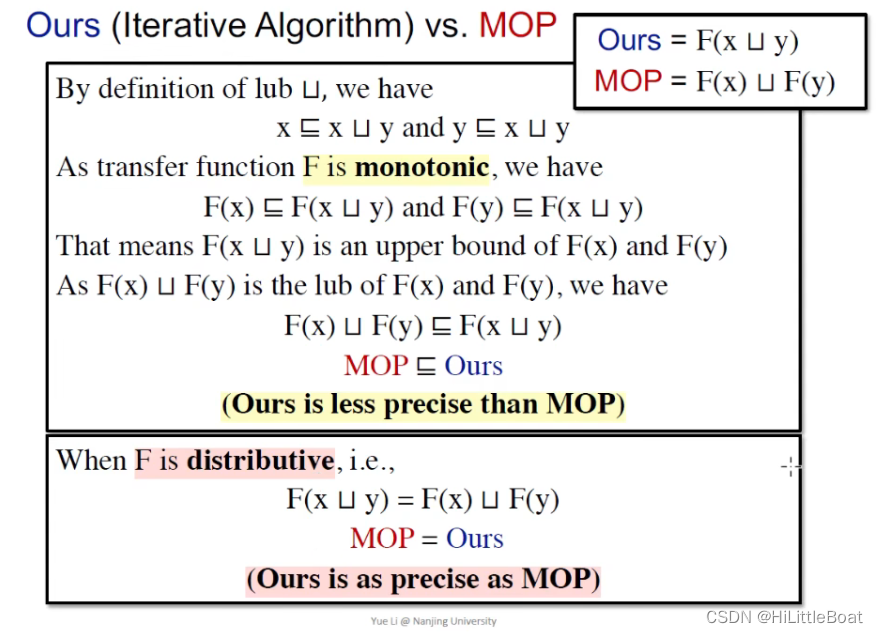
如上图所示,是迭代算法与MOP精度的比较,具体解释如下:
证明部分:
-
根据最小上界的定义,有x⊑x⊔y和 y⊑x⊔y。
-
由于转换函数F是单调的,则有F(x)⊑F(x⊔y)和F(y)⊑F(x⊔y),所以F(x⊔y)就是F(x)和F(y)的上界。
-
根据定义,F(x)⊔F(y)是F(x)和F(y)的最小上界。
-
所以F(x)⊔F(y)⊑F(x⊔y)
结论:
- MOP的精度比迭代算法更高一些。
- 当转换函数F是distributive(可分配)的时候,F(x)⊔F(y)=F(x⊔y),MOP=Ours,我们的方法与MOP一样精确
前边讲的那些 Bit-vector or gen/kill problems(可以用join/meet,是进行集合的交或并操作的),都满足分配律distributive。
但是也存在一些转换函数,不是distributive的,见4.10
4.10 Constant Propagation 常量传播
1. 定义
Given a variable x at program point p, determine whether x is guaranteed to hold a constant value at p. 在程序点p处给定一个变量x,确定x是否能保证在p处保持是一个常量。
根据定义,有强调“保证,一定”的意味,所以是must分析,是要考虑经过p点所有的路径上,x的值都必须是一样的,才算是保持常量。
这里的CFG中每个节点的OUT是比较特殊的,包含了一对值(x, v),其中x代表一个变量(名),v是x经过这个节点之后的值
2. 组成
在4.5 中讲到,数据流分析主要由三个部分组成(D, L, F)
- D: 数据流的方向(direction):forwards 或 backwards
- L: 包含值域V 和 一个meet ⊓ 或 join ⊔ 操作符的格(lattice)
- F: 一系列值域V到V的转换函数(transfer funtion)
所以我们依照这个思路,首先确定一下改数据流分析主要的组成.
(1)方向(direction, D)
因为我们最开始我们并不知道各种情况,我们想知道某个点,过去发生了什么,需要往前看,所以可以确定D(direction)为forwards,正向。
(2)格(lattice, L)
- V的值域
先确定lattice,可以看到变量的取值是所有实数都可以,并且是must分析,其方向是从top(unsafe)→bottom(safe),所以top定义的是undefined(所有变量都未定义);bottom就是NAC(就是所有变量都是非常量),如下图所示。
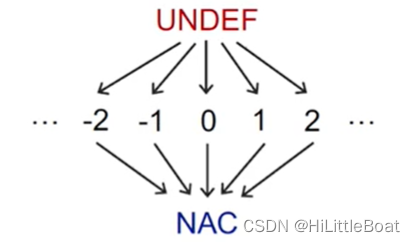
这里的top定义为undefined “所有的变量都未定义” ,而不是定义成 “所有变量都是常数” ,是因为前边曾说到,这里的值是比较特殊的,是一对值(x,v),我们在初始化的时候,程序还没有运行起来,所以将初始值定义为undefined。
- meet操作符⊓
再确定meet,在控制流合并的时候,不同的路径如何combine?因为是must-analysis,所以是⊓,可能会出现如下情况:(所以不是常见的交和并)
◆ NAC ⊓ v = NAC
◆ UNDEF ⊓ v = v //未初始化的变量不是我们分析的目标,这里不考虑未定义的变量被忽略
◆ c ⊓ v = ? c ⊓ c = c; c1 ⊓ c2 =NAC
在每个路径汇聚点PC上,我们应该对该PC上流入的所有变量进行meet操作,但并非常见的交和并,所以不满足分配律。
(3)转换函数(transfer funtion, F)
转换函数定义如下:(和之前遇到的迭代算法类似)

意思是输入的减去BB中相关变量值已经不是f常量的部分;并上在BB中新被赋值的。 其中,s 为一个语句:x=... 我们使用val(x) 表示变量x所持有的lattice值)。
接下来,分析将所有可能遇到赋值的语句,具体情况如下图所示: 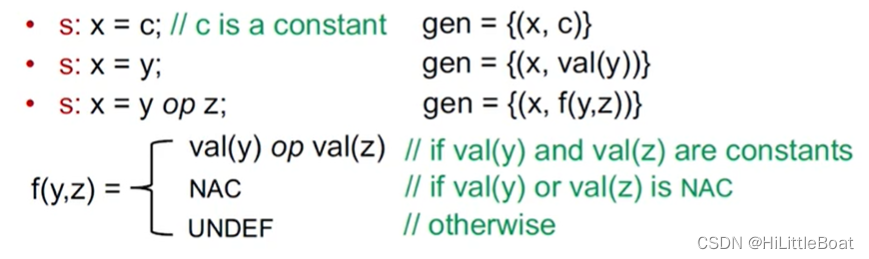
注意,如果不是赋值语句,就没影响。
3. 为什么是Nondistributivity
4.11 Worklist 算法,一种迭代算法的优化(更常用)
1. 回顾迭代算法
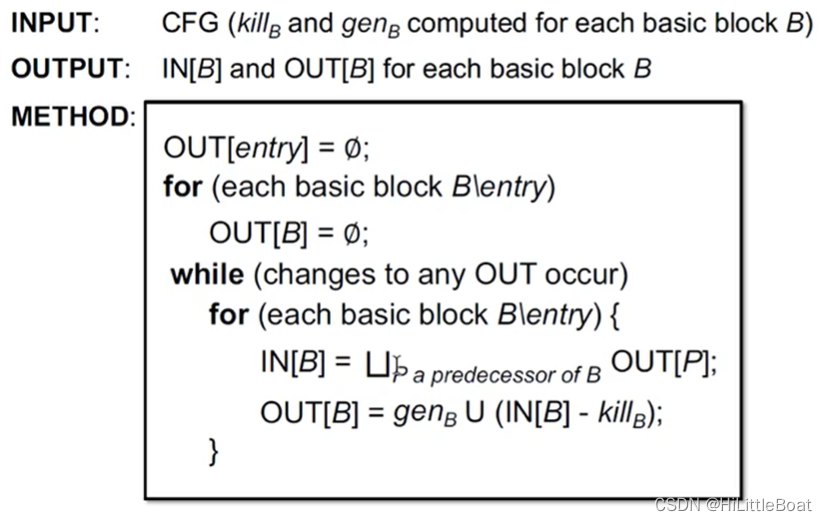
如上图所示,是之前我们学到的算法,算法停下来的要求是,所有的OUT都不再发生改变,但是每次都需要对所有已经不变的在遍历一次。
worklist算法的核心就是将有变化的值挑出来,再去利用转换函数和控制流操作。
2. Worklist 算法 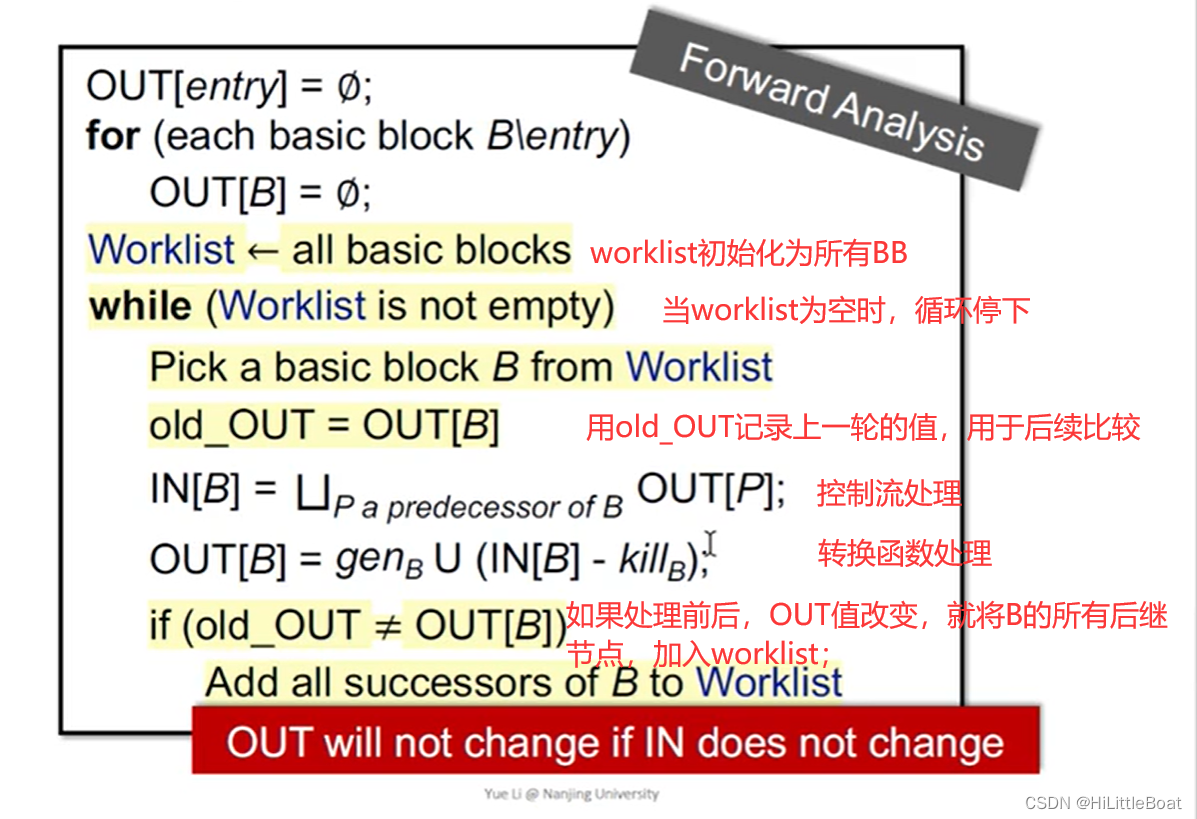
🦄总结:
终于搞定了这两节课,其中4.8里的图是非常重要的,值得后续反复观看,也需要自己能画出来。理解不动点定理、MOP与迭代算法的精度。尝试完成一下constant propagation analysis的实验,通过迭代算法和worklist算法。
🦄写在后边:
上个月期末考试+外出,进度慢了些。这几节课还挺难的,幸好还是坚持下来了,希望这个月内能够把这个课程学完,欢迎各位小伙伴一起学习交流。
老师的PPT真的做的非常精细,很多时候写出来自己的理解(翻译),还是想贴出来老师的ppt,有的时候会将自己的理解进行批注,有不正确的地方,欢迎交流。
也希望能够做到像老师所说的,在面对未来的工作时,能够更加自信,处理起来更加从容!
其他的写的很好的博主的文章:
软件分析——数据流分析2_zcc今天好好学习了吗的博客-CSDN博客
【课程笔记】南大软件分析课程4——数据流分析基础(课时5/6) - 简书
【软件分析/静态程序分析学习笔记】5.数据流分析基础(Data Flow Analysis-Foundations)_may analyses must analyses_童年梦的博客-CSDN博客

















 3813
3813

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









