






目录
一 捕获模式的介绍
1、捕获模式是在应用中很常用的一种模式,可以进行脉冲计数,测量脉宽,测量频率等功能。
2、捕获模式可以捕捉上升沿,也可以捕捉下降沿。需要对寄存器进行具体设置。
3、捕获模式的实质就是在捕获上升沿或者下降沿的同时进入捕获中断,执行中断服务函数,同时把TAR计数的值赋给 TACCRX,从而捕获到当前TAR(计数器)的值。
4、捕获模式可以用于脉冲计数也可以计算一个脉冲宽度(也就是高电平的时间或者低电平的时间),也可以计算脉冲周期(一个脉冲整个周期的时间),脉冲周期的倒数即为频率。
二 捕获模式的使用
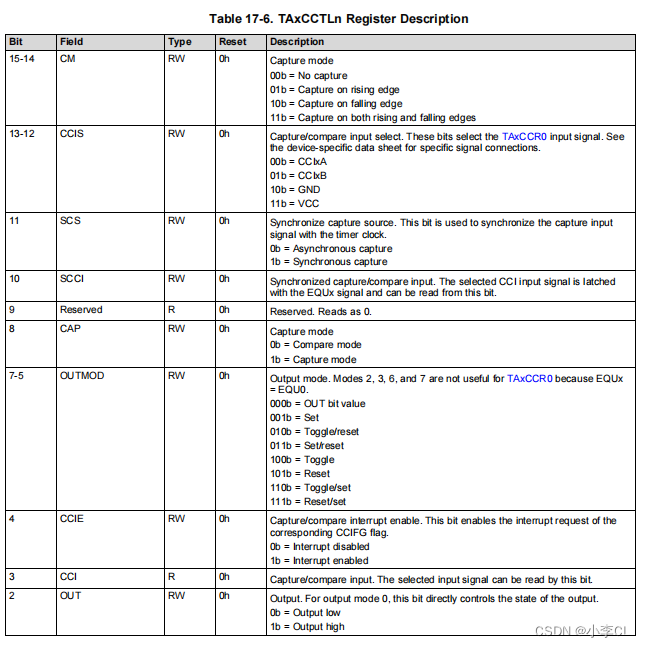
当TAxCCTLn中CAP位为1时,此路定时器被选择为捕获模式。捕获模式用于计算脉冲周期。
TA0 TA1 TA2 数据手册中都有说明引脚及通道CCIXA,捕获就是从这几个引脚输入的。
只要捕获到上升沿或者下降沿,就会进入Timer_A中断。
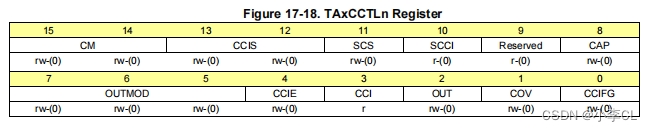
定时器输入捕获/输出比较控制寄存器 TAxCCTLn (TimeAx Capture/Compare Control Register)
三 示例代码(MSP430F5529)
3.1 配置两路输入捕获模式
这里将P1.2引脚和P1.4引脚配置为输入捕获模式:
P1DIR&=~BIT2; //捕捉P1.2口
P1REN|=BIT2;
P1OUT&=~BIT2;
P1SEL |= BIT2;
TA0CCTL1 |= CAP + CM_1 + CCIS_0 + SCS + CCIE;//捕获模式,上升和下降都捕获,选择CCI2A,同步,捕获中断开
TA0CTL |= TASSEL_2 + MC_2 + ID_0 + TAIE + TACLR; //SMCLK=1M,连续计数模式
P1DIR&=~BIT4; //捕捉P1.4口
P1REN|=BIT4;
P1OUT&=~BIT4;
P1SEL |= BIT4;
TA0CCTL3 |= CAP + CM_1 + CCIS_0 + SCS + CCIE;//捕获模式,上升和下降都捕获,选择CCI2A,同步,捕获中断开
TA0CTL |= TASSEL_2 + MC_2 + ID_0 + TAIE + TACLR; //SMCLK=1M,连续计数模式
_EINT();//中断起始位3.2 定时器中断程序
#pragma vector=TIMER0_A1_VECTOR
__interrupt void TIMER0_A1_ISR(void)
{
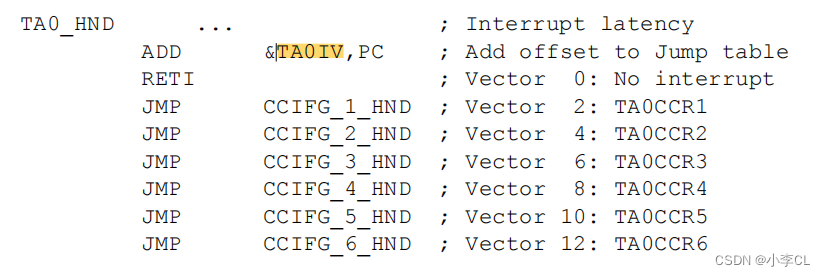
switch(TA0IV)
{
case 2:
val = TA0CCR1 - PerVal;
PerVal = TA0CCR1;
break;
case 6:
val2 = TA0CCR1 - PerVal2;
PerVal2 = TA0CCR1;
break;
}
}
其中val表示两个上升沿之间的时间间隔,即一个脉冲周期的时间,1/val即脉冲的频率。
TA0IV=2时,即TA0CCR1的定时器中断。
TA0IV=6时,即TA0CCR3的定时器中断。
四 实验结果
val和val2的值即为两个引脚输入捕获的脉冲周期,1/val和1/val2的值即为两个引脚输入捕获的频率。如果想要计算捕获了多少个脉冲,可以在定时器中断中放置一个变量累加,累加后的值即为捕获的脉冲值。
完整代码如下:
#include <msp430.h>
#define uint unsigned int
#define uchar unsigned char
uint PerVal;
uint PerVal2;
unsigned long int val;
unsigned long int val2;
/**
* main.c
*/
int main(void)
{
WDTCTL = WDTPW | WDTHOLD; // stop watchdog timer
P1DIR&=~BIT2; //捕捉P1.2口
P1REN|=BIT2;
P1OUT&=~BIT2;
P1SEL |= BIT2;
TA0CCTL1 |= CAP + CM_1 + CCIS_0 + SCS + CCIE;//捕获模式,上升和下降都捕获,选择CCI2A,同步,捕获中断开
TA0CTL |= TASSEL_2 + MC_2 + ID_0 + TAIE + TACLR; //SMCLK=1M,连续计数模式
P1DIR&=~BIT4; //捕捉P1.4口
P1REN|=BIT4;
P1OUT&=~BIT4;
P1SEL |= BIT4;
TA0CCTL3 |= CAP + CM_1 + CCIS_0 + SCS + CCIE;//捕获模式,上升和下降都捕获,选择CCI2A,同步,捕获中断开
TA0CTL |= TASSEL_2 + MC_2 + ID_0 + TAIE + TACLR; //SMCLK=1M,连续计数模式
_EINT();//中断起始位
while(1)
{
}
}
#pragma vector=TIMER0_A1_VECTOR
__interrupt void TIMER0_A1_ISR(void)
{
switch(TA0IV)
{
case 2:
val = TA0CCR1 - PerVal;
PerVal = TA0CCR1;
break;
case 6:
val2 = TA0CCR1 - PerVal2;
PerVal2 = TA0CCR1;
break;
}
}
















 7621
7621











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











