







RTOS实时操作系统简介
1. RTOS的基本概念
实时操作系统(RTOS)与传统的操作系统相比,有以下几个关键特点:
- 确定性:RTOS能够保证任务在给定的时间内完成。
- 多任务处理:RTOS支持多任务并发执行,每个任务都有其优先级。
- 实时性:RTOS能够快速响应外部事件,通常在毫秒级别。
- 资源管理:RTOS提供对硬件资源的有效管理,如内存、处理器时间等。
2. RTOS的特点
- 优先级调度:RTOS使用优先级来决定任务的执行顺序。
- 中断处理:RTOS能够快速处理中断,以响应外部事件。
- 时间管理:RTOS提供时间管理功能,如定时器和实时时钟。
- 同步机制:RTOS提供互斥量、信号量等同步机制,以防止资源冲突。
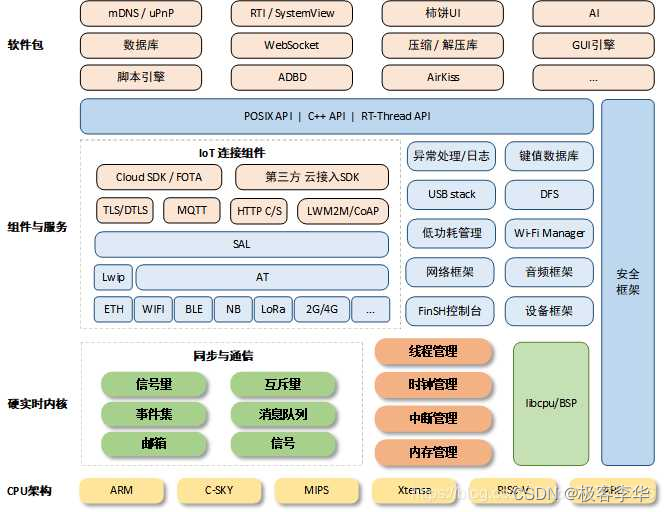
FreeRTOS架构图
3. 应用案例:温度监控系统
假设需要开发一个温度监控系统,该系统需要实时监测环境温度,并在超过设定阈值时发出警报。
硬件需求:
- 温度传感器(如DS18B20)
- 微控制器(如STM32)
- LED指示灯
- 蜂鸣器
软件需求:
- 实时监测温度
- 超过阈值时,LED闪烁,蜂鸣器响起
4. 代码示例
这里使用FreeRTOS(一种流行的开源RTOS)进行示例。以下是一个简化的代码框架:
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
// 定义温度阈值
#define TEMP_THRESHOLD 30.0f
// 任务优先级定义
#define TEMPERATURE_MONITOR_TASK_PRIORITY (tskIDLE_PRIORITY + 2)
// 温度数据队列
xQueueHandle xTempQueue;
// 温度监测任务
void vTemperatureMonitorTask(void *pvParameters) {
float temperature;
while(1) {
// 从队列中获取温度数据
if(xQueueReceive(xTempQueue, &temperature, portMAX_DELAY) == pdTRUE) {
if(temperature > TEMP_THRESHOLD) {
// 超过阈值,触发警报
// 这里可以添加LED闪烁和蜂鸣器响起的代码
}
}
}
vTaskDelete(NULL); // 不会执行到这一步,除非任务被删除
}
// 主函数
int main(void) {
// 创建温度数据队列
xTempQueue = xQueueCreate(1, sizeof(float));
// 创建温度监测任务
xTaskCreate(vTemperatureMonitorTask, "TempMonitor", configMINIMAL_STACK_SIZE, NULL, TEMPERATURE_MONITOR_TASK_PRIORITY, NULL);
// 启动调度器
vTaskStartScheduler();
// 如果调度器启动失败,将永远不会返回
for( ;; );
return 0;
}
RTOS在需要严格时间保证的应用中至关重要,如工业自动化、医疗设备、汽车系统等。通过上述案例,可以看到RTOS如何帮助实现实时监控和响应。实际应用中,RTOS的选择和使用需要根据具体的硬件平台和性能需求来决定。

















 1188
1188











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











