







双目深度相机的深度测量流程:
1、对双目相机进行标定,得到两个相机的内外参数、单应矩阵。
2、根据标定结果对原始图像校正,校正后的两张图像位于同一平面且互相平行。
3、对校正后的两张图像进行像素点匹配。
4、根据匹配结果计算每个像素的深度,从而获得深度图。
双目立体视觉深度相机详细原理
1.理想双目相机成像模型
假设左右两个相机位于同一平面(光轴平行),且相机参数(如焦距f)一致。
深度值的推导原理和公式:
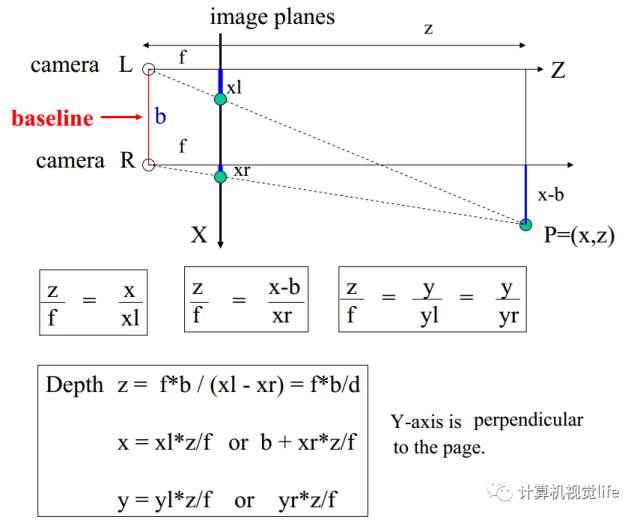
根据上述推导,空间点P离相机的距离(深度)z=f*b/d,可以发现如果要计算深度z,必须要知道:
1、相机焦距f,左右相机基线b。这些参数可以通过先验信息或者相机标定得到。
2、视差d。需要知道左相机的每个像素点(xl, yl)和右相机中对应点(xr, yr)的对应关系。这是双目视觉的核心问题。
极线约束
那么问题来了,对于左图中的一个像素点,如何确定该点在右图中的位置?是不是需要我们在整个图像中地毯式搜索一个个匹配?
答案是:不需要。因为有极线约束。极线约束对于求解图像对中像素点的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 7万+
7万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









