







封面

损失函数与反向传播
1. 损失函数
-
Loss损失函数一方面计算实际输出和目标之间的差距。
-
Loss损失函数另一方面为我们更新输出提供一定的依据。
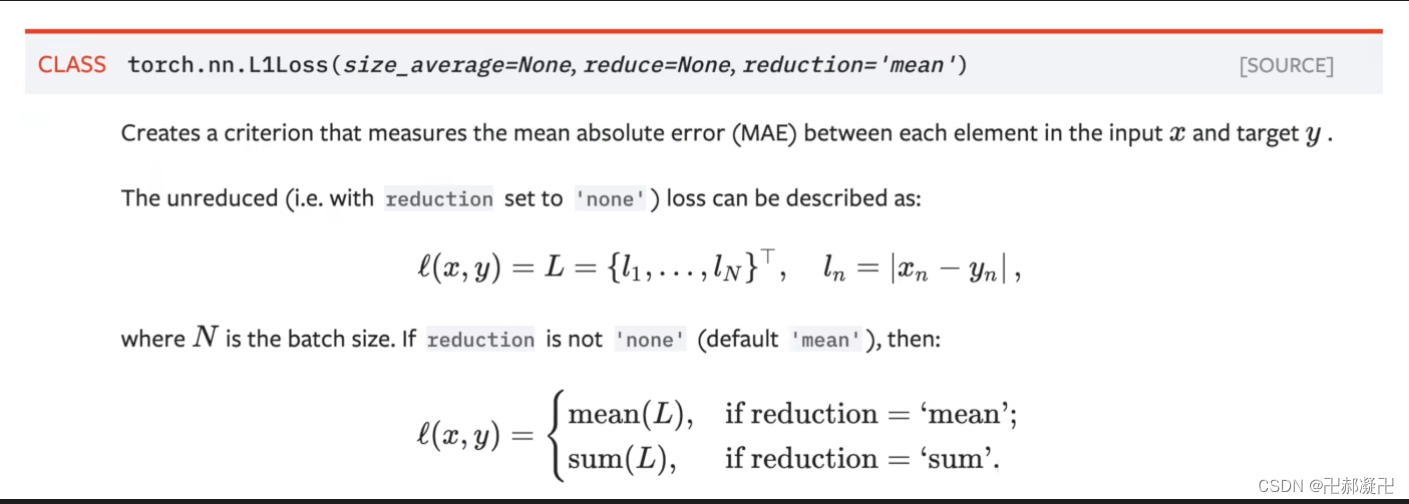
2. L1loss损失函数
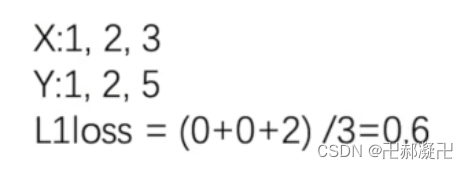
L1loss数学公式如下图所示,例子如下下图所示。
result:
import torch
from torch.nn import L1Loss
inputs = torch.tensor([1,2,3],dtype=torch.float32)
targets = torch.tensor([1,2,5],dtype=torch.float32)
inputs = torch.reshape(inputs,(1,1,1,3))
targets = torch.reshape(targets,(1,1,1,3))
loss = L1Loss() # 默认为 maen
result = loss(inputs,targets)
print(result)运行结果:
![]()
import torch
from torch.nn import L1Loss
inputs = torch.tensor([1,2,3],dtype=torch.float32)
targets = torch.tensor([1,2,5],dtype=torch.float32)
inputs = torch.reshape(inputs,(1,1,1,3))
targets = torch.reshape(targets,(1,1,1,3))
loss = L1Loss(reduction='sum') # 修改为sum,三个值的差值,然后取和
result = loss(inputs,targets)
print(result)运行结果:
![]()
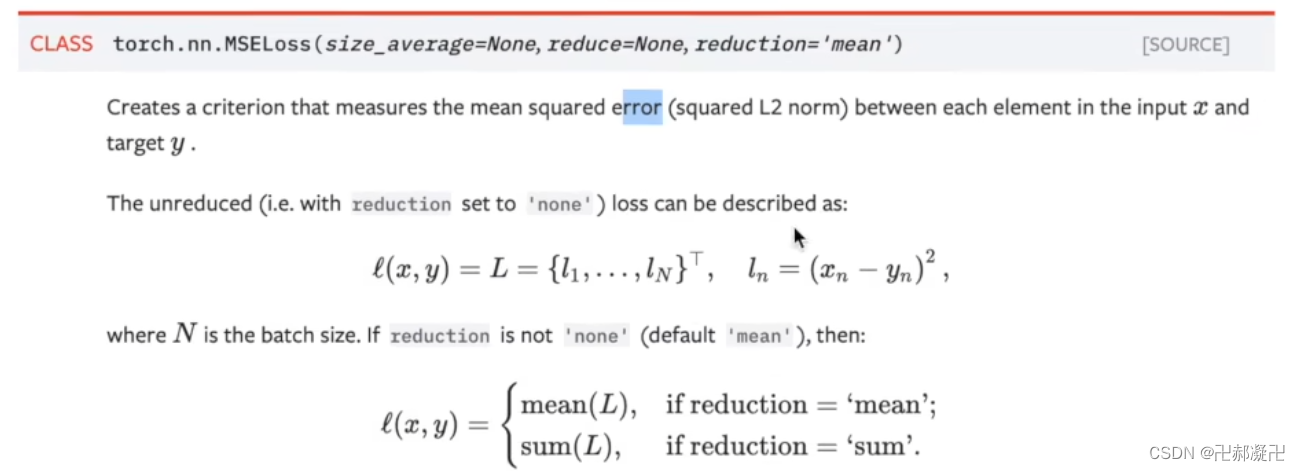
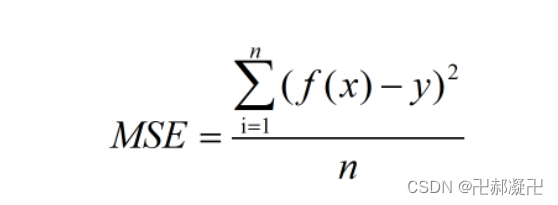
3. MSE损失函数
均方误差MSE损失函数数学公式如下图所示。
import torch
from torch.nn import L1Loss
from torch import nn
inputs = torch.tensor([1,2,3],dtype=torch.float32)
targets = torch.tensor([1,2,5],dtype=torch.float32)
inputs = torch.reshape(inputs,(1,1,1,3))
targets = torch.reshape(targets,(1,1,1,3))
loss_mse = nn.MSELoss()
result_mse = loss_mse(inputs,targets)
print(result_mse)运行结果:
![]()
4. 交叉熵损失函数

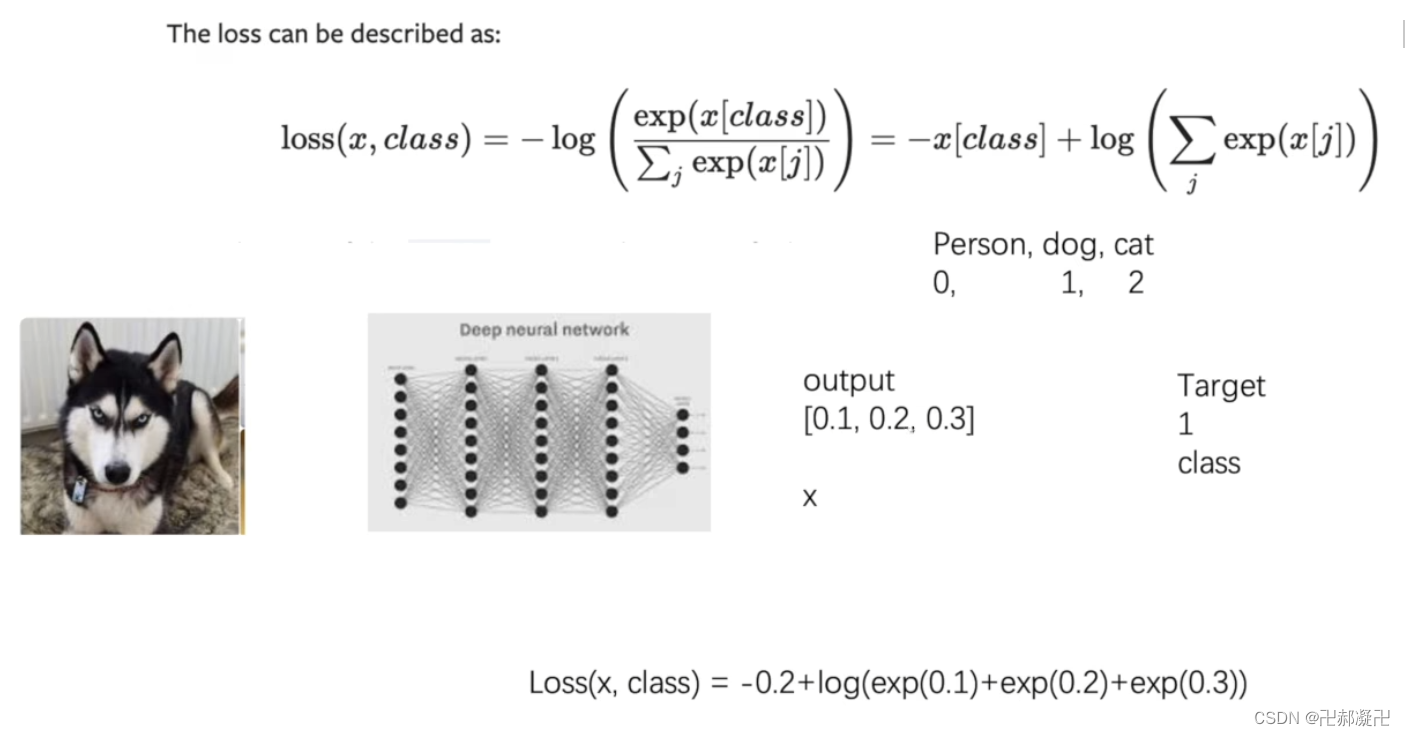
import torch
from torch.nn import L1Loss
from torch import nn
x = torch.tensor([0.1,0.2,0.3])
y = torch.tensor([1])
x = torch.reshape(x,(1,3)) # 1的 batch_size,有三类
loss_cross = nn.CrossEntropyLoss()
result_cross = loss_cross(x,y)
print(result_cross)运行结果:
![]()
5. 搭建神经网络
import torch
import torchvision
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader = DataLoader(dataset, batch_size=1,drop_last=True)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = Sequential(
Conv2d(3,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,64,5,padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
tudui = Tudui()
for data in dataloader:
imgs, targets = data
outputs = tudui(imgs)
print(outputs)
print(targets)6. 数据集计算损失函数
import torch
import torchvision
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader = DataLoader(dataset, batch_size=64,drop_last=True)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = Sequential(
Conv2d(3,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,64,5,padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
loss = nn.CrossEntropyLoss() # 交叉熵
tudui = Tudui()
for data in dataloader:
imgs, targets = data
outputs = tudui(imgs)
result_loss = loss(outputs, targets) # 计算实际输出与目标输出的差距
print(result_loss)输出结果:
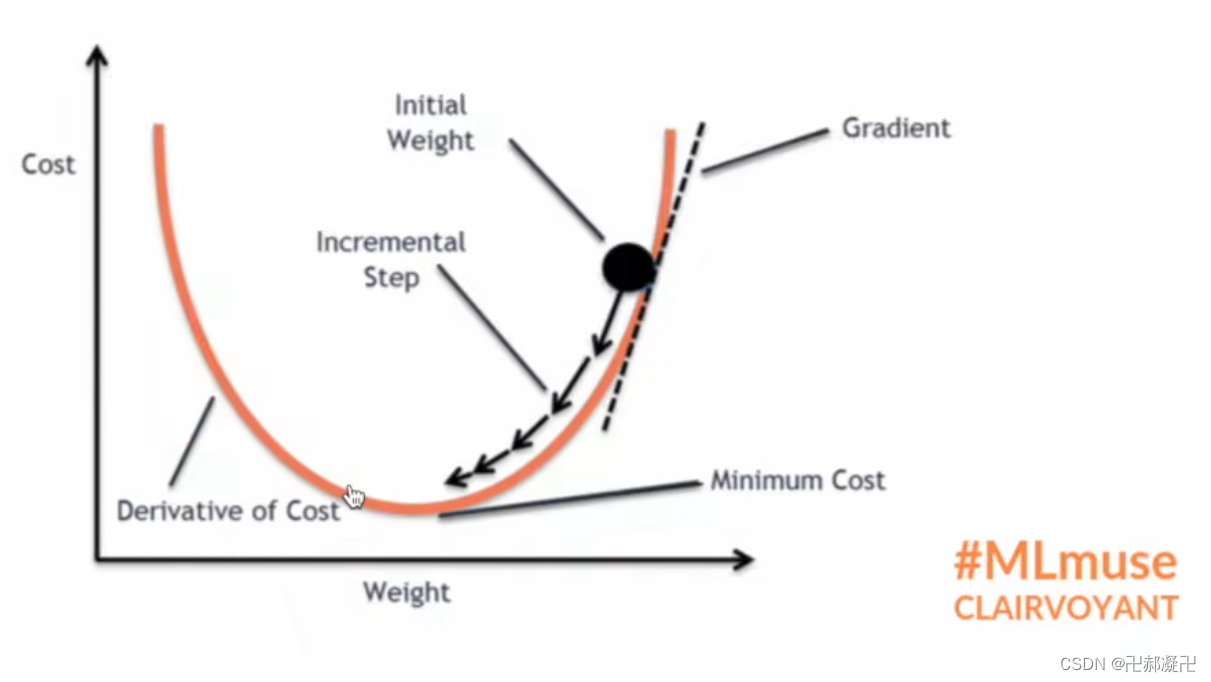
7. 损失函数反向传播
反向传播通过梯度来更新参数,使得loss损失最小,如下图所示。
import torch
import torchvision
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader = DataLoader(dataset, batch_size=64,drop_last=True)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = Sequential(
Conv2d(3,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,64,5,padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
loss = nn.CrossEntropyLoss() # 交叉熵
tudui = Tudui()
for data in dataloader:
imgs, targets = data
outputs = tudui(imgs)
result_loss = loss(outputs, targets) # 计算实际输出与目标输出的差距
result_loss.backward() # 计算出来的 loss 值有 backward 方法属性,反向传播来计算每个节点的更新的参数。这里查看网络的属性 grad 梯度属性刚开始没有,反向传播计算出来后才有,后面优化器会利用梯度优化网络参数。
print("ok")优化器
1. 优化器
- 损失函数调用backward方法,就可以调用损失函数的反向传播方法,就可以求出我们需要调节的梯度,我们就可以利用我们的优化器就可以根据梯度对参数进行调整,达到整体误差降低的目的。
-
梯度要清零,如果梯度不清零会导致梯度累加。
2. 神经网络优化一轮
import torch
import torchvision
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader = DataLoader(dataset, batch_size=64,drop_last=True)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = Sequential(
Conv2d(3,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,64,5,padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
loss = nn.CrossEntropyLoss() # 交叉熵
tudui = Tudui()
optim = torch.optim.SGD(tudui.parameters(),lr=0.01) # 随机梯度下降优化器
for data in dataloader:
imgs, targets = data
outputs = tudui(imgs)
result_loss = loss(outputs, targets) # 计算实际输出与目标输出的差距
optim.zero_grad() # 梯度清零
result_loss.backward() # 反向传播,计算损失函数的梯度
optim.step() # 根据梯度,对网络的参数进行调优
print(result_loss) # 对数据只看了一遍,只看了一轮,所以loss下降不大3. 神经网络优化多轮
import torch
import torchvision
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader = DataLoader(dataset, batch_size=64,drop_last=True)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = Sequential(
Conv2d(3,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,64,5,padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
loss = nn.CrossEntropyLoss() # 交叉熵
tudui = Tudui()
optim = torch.optim.SGD(tudui.parameters(),lr=0.01) # 随机梯度下降优化器
for epoch in range(20):
running_loss = 0.0
for data in dataloader:
imgs, targets = data
outputs = tudui(imgs)
result_loss = loss(outputs, targets) # 计算实际输出与目标输出的差距
optim.zero_grad() # 梯度清零
result_loss.backward() # 反向传播,计算损失函数的梯度
optim.step() # 根据梯度,对网络的参数进行调优
running_loss = running_loss + result_loss
print(running_loss) # 对这一轮所有误差的总和4. 神经网络学习率优化
import torch
import torchvision
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader = DataLoader(dataset, batch_size=64,drop_last=True)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = Sequential(
Conv2d(3,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,64,5,padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
loss = nn.CrossEntropyLoss() # 交叉熵
tudui = Tudui()
optim = torch.optim.SGD(tudui.parameters(),lr=0.01) # 随机梯度下降优化器
scheduler = torch.optim.lr_scheduler.StepLR(optim, step_size=5, gamma=0.1) # 每过 step_size 更新一次优化器,更新是学习率为原来的学习率的的 0.1 倍
for epoch in range(20):
running_loss = 0.0
for data in dataloader:
imgs, targets = data
outputs = tudui(imgs)
result_loss = loss(outputs, targets) # 计算实际输出与目标输出的差距
optim.zero_grad() # 梯度清零
result_loss.backward() # 反向传播,计算损失函数的梯度
optim.step() # 根据梯度,对网络的参数进行调优
scheduler.step() # 学习率太小了,所以20个轮次后,相当于没走多少
running_loss = running_loss + result_loss
print(running_loss) # 对这一轮所有误差的总和网络模型使用及修改
1. 下载网络模型
import torchvision
#trauin_data = torchvision.datasets.ImageNet("./dataset",split="train",download=True,transform=torchvision.transforms.ToTensor()) # 这个数据集没有办法再公开的访问了
vgg16_true = torchvision.models.vgg16(pretrained=True) # 下载卷积层对应的参数是多少、池化层对应的参数时多少,这些参数时ImageNet训练好了的
vgg16_false = torchvision.models.vgg16(pretrained=False) # 没有预训练的参数
print("ok")
print(vgg16_true)2. 查看函数用法
import torchvision
help(torchvision.models.vgg16)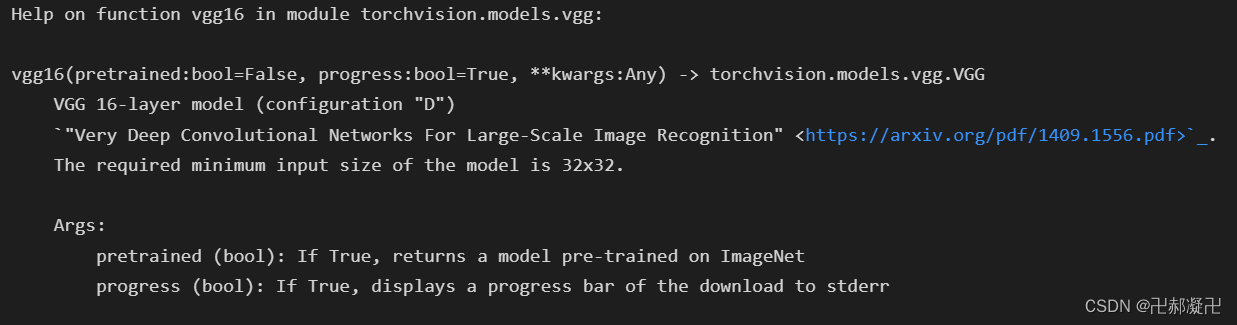
3. 网络模型添加
import torchvision
from torch import nn
dataset = torchvision.datasets.CIFAR10("./dataset",train=True,transform=torchvision.transforms.ToTensor(),download=True)
vgg16_true = torchvision.models.vgg16(pretrained=True) # 下载卷积层对应的参数是多少、池化层对应的参数时多少,这些参数时ImageNet训练好了的
vgg16_true.add_module('add_linear',nn.Linear(1000,10)) # 在VGG16后面添加一个线性层,使得输出为适应CIFAR10的输出,CIFAR10需要输出10个种类
print(vgg16_true)4. 网络模型修改
import torchvision
from torch import nn
vgg16_false = torchvision.models.vgg16(pretrained=False) # 没有预训练的参数
print(vgg16_false)
vgg16_false.classifier[6] = nn.Linear(4096,10)
print(vgg16_false)网络模型的保存于读取
1. 网络模型保存(方式一)
import torchvision
import torch
vgg16 = torchvision.models.vgg16(pretrained=False)
torch.save(vgg16,"./model/vgg16_method1.pth") # 保存方式一:模型结构 + 模型参数
print(vgg16)2. 网络模型导入(方式一)
import torch
model = torch.load("./model/vgg16_method1.pth") # 保存方式一对应的加载模型
print(model)3. 网络模型保存(方式二)
import torchvision
import torch
vgg16 = torchvision.models.vgg16(pretrained=False)
torch.save(vgg16.state_dict(),"./model/vgg16_method2.pth") # 保存方式二:模型参数(官方推荐),不再保存网络模型结构
print(vgg16)4. 网络模型导入(方式二)
import torch
import torchvision
model = torch.load("./model/vgg16_method2.pth") # 导入模型参数
print(model)import torch
import torchvision
vgg16 = torchvision.models.vgg16(pretrained=False)
print(vgg16)
vgg16.load_state_dict(torch.load("./model/vgg16_method2.pth")) # 将模型参数导入到模型结构中
print(vgg16)完整模型训练套路
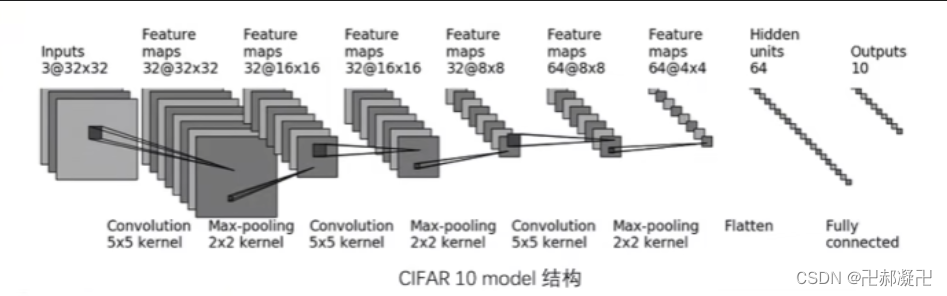
1. CIFAR 10 model 网络模型
下面用 CIFAR 10 model网络来完成分类问题,网络模型如下图所示。
2. DataLoader加载数据集
import torchvision
from torch import nn
from torch.utils.data import DataLoader
# 准备数据集
train_data = torchvision.datasets.CIFAR10("./dataset",train=True,transform=torchvision.transforms.ToTensor(),download=True)
test_data = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
# length 长度
train_data_size = len(train_data)
test_data_size = len(test_data)
# 如果train_data_size=10,则打印:训练数据集的长度为:10
print("训练数据集的长度:{}".format(train_data_size))
print("测试数据集的长度:{}".format(test_data_size))
# 利用 Dataloader 来加载数据集
train_dataloader = DataLoader(train_data_size, batch_size=64)
test_dataloader = DataLoader(test_data_size, batch_size=64)3. 测试网络正确
import torch
from torch import nn
# 搭建神经网络
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = nn.Sequential(
nn.Conv2d(3,32,5,1,2), # 输入通道3,输出通道32,卷积核尺寸5×5,步长1,填充2
nn.MaxPool2d(2),
nn.Conv2d(32,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,64,5,1,2),
nn.MaxPool2d(2),
nn.Flatten(), # 展平后变成 64*4*4 了
nn.Linear(64*4*4,64),
nn.Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
if __name__ == '__main__':
tudui = Tudui()
input = torch.ones((64,3,32,32))
output = tudui(input)
print(output.shape) # 测试输出的尺寸是不是我们想要的4. 网络训练数据
import torchvision
from torch import nn
from torch.utils.data import DataLoader
# from model import * 相当于把 model中的所有内容写到这里,这里直接把 model 写在这里
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = nn.Sequential(
nn.Conv2d(3,32,5,1,2), # 输入通道3,输出通道32,卷积核尺寸5×5,步长1,填充2
nn.MaxPool2d(2),
nn.Conv2d(32,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,64,5,1,2),
nn.MaxPool2d(2),
nn.Flatten(), # 展平后变成 64*4*4 了
nn.Linear(64*4*4,64),
nn.Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
# 准备数据集
train_data = torchvision.datasets.CIFAR10("./dataset",train=True,transform=torchvision.transforms.ToTensor(),download=True)
test_data = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
# length 长度
train_data_size = len(train_data)
test_data_size = len(test_data)
# 如果train_data_size=10,则打印:训练数据集的长度为:10
print("训练数据集的长度:{}".format(train_data_size))
print("测试数据集的长度:{}".format(test_data_size))
# 利用 Dataloader 来加载数据集
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)
# 创建网络模型
tudui = Tudui()
# 损失函数
loss_fn = nn.CrossEntropyLoss() # 交叉熵,fn 是 fuction 的缩写
# 优化器
learning = 0.01 # 1e-2 就是 0.01 的意思
optimizer = torch.optim.SGD(tudui.parameters(),learning) # 随机梯度下降优化器
# 设置网络的一些参数
# 记录训练的次数
total_train_step = 0
# 训练的轮次
epoch = 10
for i in range(epoch):
print("-----第 {} 轮训练开始-----".format(i+1))
# 训练步骤开始
for data in train_dataloader:
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets) # 计算实际输出与目标输出的差距
# 优化器对模型调优
optimizer.zero_grad() # 梯度清零
loss.backward() # 反向传播,计算损失函数的梯度
optimizer.step() # 根据梯度,对网络的参数进行调优
total_train_step = total_train_step + 1
#print("训练次数:{},Loss:{}".format(total_train_step,loss)) # 方式一:获得loss值
print("训练次数:{},Loss:{}".format(total_train_step,loss.item())) # 方式二:获得loss值5. item作用
item ()的作用是取出单元素张量的元素值并返回该值,保持该元素类型不变。
import torch
a = torch.tensor(5)
print(a)
print(a.item())6. 查看训练损失
① 在pytorch中,tensor有一个requires_grad参数,如果设置为True,则反向传播时,该tensor就会自动求导。
② tensor的requires_grad的属性默认为False,若一个节点(叶子变量:自己创建的tensor)requires_grad被设置为True,那么所有依赖它的节点requires_grad都为True(即使其他相依赖的tensor的requires_grad = False)
③ 当requires_grad设置为False时,反向传播时就不会自动求导了,因此大大节约了显存或者说内存。
④ with torch.no_grad的作用在该模块下,所有计算得出的tensor的requires_grad都自动设置为False。
⑤ 即使一个tensor(命名为x)的requires_grad = True,在with torch.no_grad计算,由x得到的新tensor(命名为w-标量)requires_grad也为False,且grad_fn也为None,即不会对w求导。
⑥ torch.no_grad():停止计算梯度,不能进行反向传播。
import torchvision
import torch
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
# from model import * 相当于把 model中的所有内容写到这里,这里直接把 model 写在这里
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = nn.Sequential(
nn.Conv2d(3,32,5,1,2), # 输入通道3,输出通道32,卷积核尺寸5×5,步长1,填充2
nn.MaxPool2d(2),
nn.Conv2d(32,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,64,5,1,2),
nn.MaxPool2d(2),
nn.Flatten(), # 展平后变成 64*4*4 了
nn.Linear(64*4*4,64),
nn.Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
# 准备数据集
train_data = torchvision.datasets.CIFAR10("./dataset",train=True,transform=torchvision.transforms.ToTensor(),download=True)
test_data = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
# length 长度
train_data_size = len(train_data)
test_data_size = len(test_data)
# 如果train_data_size=10,则打印:训练数据集的长度为:10
print("训练数据集的长度:{}".format(train_data_size))
print("测试数据集的长度:{}".format(test_data_size))
# 利用 Dataloader 来加载数据集
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)
# 创建网络模型
tudui = Tudui()
# 损失函数
loss_fn = nn.CrossEntropyLoss() # 交叉熵,fn 是 fuction 的缩写
# 优化器
learning = 0.01 # 1e-2 就是 0.01 的意思
optimizer = torch.optim.SGD(tudui.parameters(),learning) # 随机梯度下降优化器
# 设置网络的一些参数
# 记录训练的次数
total_train_step = 0
# 记录测试的次数
total_test_step = 0
# 训练的轮次
epoch = 10
# 添加 tensorboard
writer = SummaryWriter("logs")
for i in range(epoch):
print("-----第 {} 轮训练开始-----".format(i+1))
# 训练步骤开始
for data in train_dataloader:
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets) # 计算实际输出与目标输出的差距
# 优化器对模型调优
optimizer.zero_grad() # 梯度清零
loss.backward() # 反向传播,计算损失函数的梯度
optimizer.step() # 根据梯度,对网络的参数进行调优
total_train_step = total_train_step + 1
if total_train_step % 100 == 0:
print("训练次数:{},Loss:{}".format(total_train_step,loss.item())) # 方式二:获得loss值
writer.add_scalar("train_loss",loss.item(),total_train_step)
# 测试步骤开始(每一轮训练后都查看在测试数据集上的loss情况)
total_test_loss = 0
with torch.no_grad(): # 没有梯度计算,节约内存
for data in test_dataloader: # 测试数据集提取数据
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets) # 仅data数据在网络模型上的损失
total_test_loss = total_test_loss + loss.item() # 所有loss
print("整体测试集上的Loss:{}".format(total_test_loss))
writer.add_scalar("test_loss",total_test_loss,total_test_step)
total_test_step = total_test_step + 1
writer.close()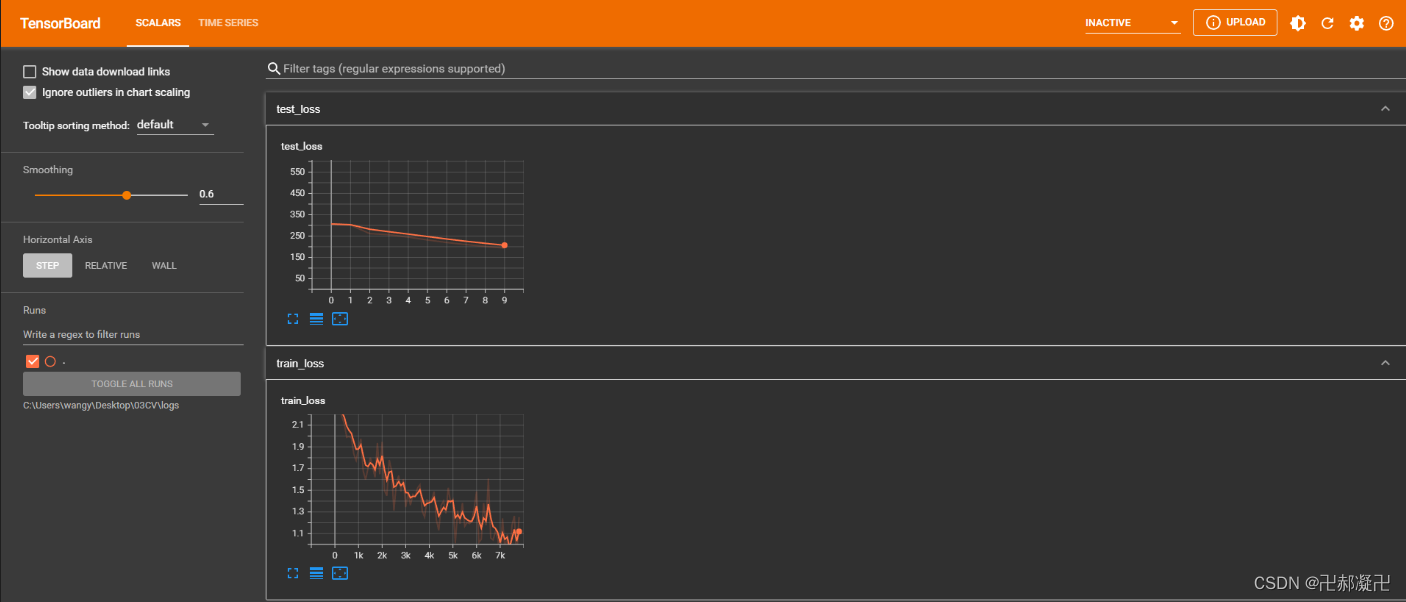
7. 保存每一轮后参数
import torchvision
import torch
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
# from model import * 相当于把 model中的所有内容写到这里,这里直接把 model 写在这里
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = nn.Sequential(
nn.Conv2d(3,32,5,1,2), # 输入通道3,输出通道32,卷积核尺寸5×5,步长1,填充2
nn.MaxPool2d(2),
nn.Conv2d(32,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,64,5,1,2),
nn.MaxPool2d(2),
nn.Flatten(), # 展平后变成 64*4*4 了
nn.Linear(64*4*4,64),
nn.Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
# 准备数据集
train_data = torchvision.datasets.CIFAR10("./dataset",train=True,transform=torchvision.transforms.ToTensor(),download=True)
test_data = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
# length 长度
train_data_size = len(train_data)
test_data_size = len(test_data)
# 如果train_data_size=10,则打印:训练数据集的长度为:10
print("训练数据集的长度:{}".format(train_data_size))
print("测试数据集的长度:{}".format(test_data_size))
# 利用 Dataloader 来加载数据集
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)
# 创建网络模型
tudui = Tudui()
# 损失函数
loss_fn = nn.CrossEntropyLoss() # 交叉熵,fn 是 fuction 的缩写
# 优化器
learning = 0.01 # 1e-2 就是 0.01 的意思
optimizer = torch.optim.SGD(tudui.parameters(),learning) # 随机梯度下降优化器
# 设置网络的一些参数
# 记录训练的次数
total_train_step = 0
# 记录测试的次数
total_test_step = 0
# 训练的轮次
epoch = 10
# 添加 tensorboard
writer = SummaryWriter("logs")
for i in range(epoch):
print("-----第 {} 轮训练开始-----".format(i+1))
# 训练步骤开始
for data in train_dataloader:
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets) # 计算实际输出与目标输出的差距
# 优化器对模型调优
optimizer.zero_grad() # 梯度清零
loss.backward() # 反向传播,计算损失函数的梯度
optimizer.step() # 根据梯度,对网络的参数进行调优
total_train_step = total_train_step + 1
if total_train_step % 100 == 0:
print("训练次数:{},Loss:{}".format(total_train_step,loss.item())) # 方式二:获得loss值
writer.add_scalar("train_loss",loss.item(),total_train_step)
# 测试步骤开始(每一轮训练后都查看在测试数据集上的loss情况)
total_test_loss = 0
with torch.no_grad(): # 没有梯度了
for data in test_dataloader: # 测试数据集提取数据
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets) # 仅data数据在网络模型上的损失
total_test_loss = total_test_loss + loss.item() # 所有loss
print("整体测试集上的Loss:{}".format(total_test_loss))
writer.add_scalar("test_loss",total_test_loss,total_test_step)
total_test_step = total_test_step + 1
torch.save(tudui, "./model/tudui_{}.pth".format(i)) # 保存每一轮训练后的结果
print("模型已保存")
writer.close()8. argmax作用
import torch
outputs = torch.tensor([[0.1,0.2],
[0.05,0.4]])
print(outputs.argmax(0)) # 竖着看,最大值的索引
print(outputs.argmax(1)) # 横着看,最大值的索引
preds = outputs.argmax(0)
targets = torch.tensor([0,1])
print((preds == targets).sum()) # 对应位置相等的个数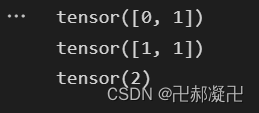
9. 打印正确率
import torchvision
import torch
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
# from model import * 相当于把 model中的所有内容写到这里,这里直接把 model 写在这里
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = nn.Sequential(
nn.Conv2d(3,32,5,1,2), # 输入通道3,输出通道32,卷积核尺寸5×5,步长1,填充2
nn.MaxPool2d(2),
nn.Conv2d(32,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,64,5,1,2),
nn.MaxPool2d(2),
nn.Flatten(), # 展平后变成 64*4*4 了
nn.Linear(64*4*4,64),
nn.Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
# 准备数据集
train_data = torchvision.datasets.CIFAR10("./dataset",train=True,transform=torchvision.transforms.ToTensor(),download=True)
test_data = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
# length 长度
train_data_size = len(train_data)
test_data_size = len(test_data)
# 如果train_data_size=10,则打印:训练数据集的长度为:10
print("训练数据集的长度:{}".format(train_data_size))
print("测试数据集的长度:{}".format(test_data_size))
# 利用 Dataloader 来加载数据集
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)
# 创建网络模型
tudui = Tudui()
# 损失函数
loss_fn = nn.CrossEntropyLoss() # 交叉熵,fn 是 fuction 的缩写
# 优化器
learning = 0.01 # 1e-2 就是 0.01 的意思
optimizer = torch.optim.SGD(tudui.parameters(),learning) # 随机梯度下降优化器
# 设置网络的一些参数
# 记录训练的次数
total_train_step = 0
# 记录测试的次数
total_test_step = 0
# 训练的轮次
epoch = 10
# 添加 tensorboard
writer = SummaryWriter("logs")
for i in range(epoch):
print("-----第 {} 轮训练开始-----".format(i+1))
# 训练步骤开始
for data in train_dataloader:
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets) # 计算实际输出与目标输出的差距
# 优化器对模型调优
optimizer.zero_grad() # 梯度清零
loss.backward() # 反向传播,计算损失函数的梯度
optimizer.step() # 根据梯度,对网络的参数进行调优
total_train_step = total_train_step + 1
if total_train_step % 100 == 0:
print("训练次数:{},Loss:{}".format(total_train_step,loss.item())) # 方式二:获得loss值
writer.add_scalar("train_loss",loss.item(),total_train_step)
# 测试步骤开始(每一轮训练后都查看在测试数据集上的loss情况)
total_test_loss = 0
total_accuracy = 0
with torch.no_grad(): # 没有梯度了
for data in test_dataloader: # 测试数据集提取数据
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets) # 仅data数据在网络模型上的损失
total_test_loss = total_test_loss + loss.item() # 所有loss
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy = total_accuracy + accuracy
print("整体测试集上的Loss:{}".format(total_test_loss))
print("整体测试集上的正确率:{}".format(total_accuracy/test_data_size))
writer.add_scalar("test_loss",total_test_loss,total_test_step)
writer.add_scalar("test_accuracy",total_accuracy/test_data_size,total_test_step)
total_test_step = total_test_step + 1
torch.save(tudui, "./model/tudui_{}.pth".format(i)) # 保存每一轮训练后的结果
print("模型已保存")
writer.close()10. 特殊层作用
① model.train()和model.eval()的区别主要在于Batch Normalization和Dropout两层。
② 如果模型中有BN层(Batch Normalization)和 Dropout,需要在训练时添加model.train()。model.train()是保证BN层能够用到每一批数据的均值和方差。对于Dropout,model.train()是随机取一部分网络连接来训练更新参数。
③ 不启用 Batch Normalization 和 Dropout。如果模型中有BN层(Batch Normalization)和Dropout,在测试时添加model.eval()。model.eval()是保证BN层能够用全部训练数据的均值和方差,即测试过程中要保证BN层的均值和方差不变。对于Dropout,model.eval()是利用到了所有网络连接,即不进行随机舍弃神经元。
④ 训练完train样本后,生成的模型model要用来测试样本。在model(test)之前,需要加上model.eval(),否则的话,有输入数据,即使不训练,它也会改变权值。这是model中含有BN层和Dropout所带来的的性质。
⑤ 在做one classification的时候,训练集和测试集的样本分布是不一样的,尤其需要注意这一点。
import torchvision
import torch
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
# from model import * 相当于把 model中的所有内容写到这里,这里直接把 model 写在这里
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = nn.Sequential(
nn.Conv2d(3,32,5,1,2), # 输入通道3,输出通道32,卷积核尺寸5×5,步长1,填充2
nn.MaxPool2d(2),
nn.Conv2d(32,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,64,5,1,2),
nn.MaxPool2d(2),
nn.Flatten(), # 展平后变成 64*4*4 了
nn.Linear(64*4*4,64),
nn.Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
# 准备数据集
train_data = torchvision.datasets.CIFAR10("./dataset",train=True,transform=torchvision.transforms.ToTensor(),download=True)
test_data = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
# length 长度
train_data_size = len(train_data)
test_data_size = len(test_data)
# 如果train_data_size=10,则打印:训练数据集的长度为:10
print("训练数据集的长度:{}".format(train_data_size))
print("测试数据集的长度:{}".format(test_data_size))
# 利用 Dataloader 来加载数据集
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)
# 创建网络模型
tudui = Tudui()
# 损失函数
loss_fn = nn.CrossEntropyLoss() # 交叉熵,fn 是 fuction 的缩写
# 优化器
learning = 0.01 # 1e-2 就是 0.01 的意思
optimizer = torch.optim.SGD(tudui.parameters(),learning) # 随机梯度下降优化器
# 设置网络的一些参数
# 记录训练的次数
total_train_step = 0
# 记录测试的次数
total_test_step = 0
# 训练的轮次
epoch = 10
# 添加 tensorboard
writer = SummaryWriter("logs")
for i in range(epoch):
print("-----第 {} 轮训练开始-----".format(i+1))
# 训练步骤开始
tudui.train() # 当网络中有dropout层、batchnorm层时,这些层能起作用
for data in train_dataloader:
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets) # 计算实际输出与目标输出的差距
# 优化器对模型调优
optimizer.zero_grad() # 梯度清零
loss.backward() # 反向传播,计算损失函数的梯度
optimizer.step() # 根据梯度,对网络的参数进行调优
total_train_step = total_train_step + 1
if total_train_step % 100 == 0:
print("训练次数:{},Loss:{}".format(total_train_step,loss.item())) # 方式二:获得loss值
writer.add_scalar("train_loss",loss.item(),total_train_step)
# 测试步骤开始(每一轮训练后都查看在测试数据集上的loss情况)
tudui.eval() # 当网络中有dropout层、batchnorm层时,这些层不能起作用
total_test_loss = 0
total_accuracy = 0
with torch.no_grad(): # 没有梯度了
for data in test_dataloader: # 测试数据集提取数据
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets) # 仅data数据在网络模型上的损失
total_test_loss = total_test_loss + loss.item() # 所有loss
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy = total_accuracy + accuracy
print("整体测试集上的Loss:{}".format(total_test_loss))
print("整体测试集上的正确率:{}".format(total_accuracy/test_data_size))
writer.add_scalar("test_loss",total_test_loss,total_test_step)
writer.add_scalar("test_accuracy",total_accuracy/test_data_size,total_test_step)
total_test_step = total_test_step + 1
torch.save(tudui, "./model/tudui_{}.pth".format(i)) # 保存每一轮训练后的结果
#torch.save(tudui.state_dict(),"tudui_{}.path".format(i)) # 保存方式二
print("模型已保存")
writer.close()利用gpu训练
1. 利用GPU训练(方式一)
GPU训练主要有三部分,网络模型、数据(输入、标注)、损失函数,这三部分放到GPU上。
import torchvision
import torch
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
# from model import * 相当于把 model中的所有内容写到这里,这里直接把 model 写在这里
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = nn.Sequential(
nn.Conv2d(3,32,5,1,2), # 输入通道3,输出通道32,卷积核尺寸5×5,步长1,填充2
nn.MaxPool2d(2),
nn.Conv2d(32,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,64,5,1,2),
nn.MaxPool2d(2),
nn.Flatten(), # 展平后变成 64*4*4 了
nn.Linear(64*4*4,64),
nn.Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
# 准备数据集
train_data = torchvision.datasets.CIFAR10("./dataset",train=True,transform=torchvision.transforms.ToTensor(),download=True)
test_data = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
# length 长度
train_data_size = len(train_data)
test_data_size = len(test_data)
# 如果train_data_size=10,则打印:训练数据集的长度为:10
print("训练数据集的长度:{}".format(train_data_size))
print("测试数据集的长度:{}".format(test_data_size))
# 利用 Dataloader 来加载数据集
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)
# 创建网络模型
tudui = Tudui()
if torch.cuda.is_available():
tudui = tudui.cuda() # 网络模型转移到cuda上
# 损失函数
loss_fn = nn.CrossEntropyLoss() # 交叉熵,fn 是 fuction 的缩写
if torch.cuda.is_available():
loss_fn = loss_fn.cuda() # 损失函数转移到cuda上
# 优化器
learning = 0.01 # 1e-2 就是 0.01 的意思
optimizer = torch.optim.SGD(tudui.parameters(),learning) # 随机梯度下降优化器
# 设置网络的一些参数
# 记录训练的次数
total_train_step = 0
# 记录测试的次数
total_test_step = 0
# 训练的轮次
epoch = 10
# 添加 tensorboard
writer = SummaryWriter("logs")
for i in range(epoch):
print("-----第 {} 轮训练开始-----".format(i+1))
# 训练步骤开始
tudui.train() # 当网络中有dropout层、batchnorm层时,这些层能起作用
for data in train_dataloader:
imgs, targets = data
if torch.cuda.is_available():
imgs = imgs.cuda() # 数据放到cuda上
targets = targets.cuda() # 数据放到cuda上
outputs = tudui(imgs)
loss = loss_fn(outputs, targets) # 计算实际输出与目标输出的差距
# 优化器对模型调优
optimizer.zero_grad() # 梯度清零
loss.backward() # 反向传播,计算损失函数的梯度
optimizer.step() # 根据梯度,对网络的参数进行调优
total_train_step = total_train_step + 1
if total_train_step % 100 == 0:
print("训练次数:{},Loss:{}".format(total_train_step,loss.item())) # 方式二:获得loss值
writer.add_scalar("train_loss",loss.item(),total_train_step)
# 测试步骤开始(每一轮训练后都查看在测试数据集上的loss情况)
tudui.eval() # 当网络中有dropout层、batchnorm层时,这些层不能起作用
total_test_loss = 0
total_accuracy = 0
with torch.no_grad(): # 没有梯度了
for data in test_dataloader: # 测试数据集提取数据
imgs, targets = data # 数据放到cuda上
if torch.cuda.is_available():
imgs = imgs.cuda() # 数据放到cuda上
targets = targets.cuda()
outputs = tudui(imgs)
loss = loss_fn(outputs, targets) # 仅data数据在网络模型上的损失
total_test_loss = total_test_loss + loss.item() # 所有loss
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy = total_accuracy + accuracy
print("整体测试集上的Loss:{}".format(total_test_loss))
print("整体测试集上的正确率:{}".format(total_accuracy/test_data_size))
writer.add_scalar("test_loss",total_test_loss,total_test_step)
writer.add_scalar("test_accuracy",total_accuracy/test_data_size,total_test_step)
total_test_step = total_test_step + 1
torch.save(tudui, "./model/tudui_{}.pth".format(i)) # 保存每一轮训练后的结果
#torch.save(tudui.state_dict(),"tudui_{}.path".format(i)) # 保存方式二
print("模型已保存")
writer.close()2. 利用GPU训练(方式二)
电脑上有两个显卡时,可以用指定cuda:0、cuda:1。
import torchvision
import torch
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
import time
# 定义训练的设备
#device = torch.device("cpu")
#device = torch.device("cuda") # 使用 GPU 方式一
#device = torch.device("cuda:0") # 使用 GPU 方式二
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# from model import * 相当于把 model中的所有内容写到这里,这里直接把 model 写在这里
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = nn.Sequential(
nn.Conv2d(3,32,5,1,2), # 输入通道3,输出通道32,卷积核尺寸5×5,步长1,填充2
nn.MaxPool2d(2),
nn.Conv2d(32,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,64,5,1,2),
nn.MaxPool2d(2),
nn.Flatten(), # 展平后变成 64*4*4 了
nn.Linear(64*4*4,64),
nn.Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
# 准备数据集
train_data = torchvision.datasets.CIFAR10("./dataset",train=True,transform=torchvision.transforms.ToTensor(),download=True)
test_data = torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor(),download=True)
# length 长度
train_data_size = len(train_data)
test_data_size = len(test_data)
# 如果train_data_size=10,则打印:训练数据集的长度为:10
print("训练数据集的长度:{}".format(train_data_size))
print("测试数据集的长度:{}".format(test_data_size))
# 利用 Dataloader 来加载数据集
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)
# 创建网络模型
tudui = Tudui()
tudui = tudui.to(device) # 也可以不赋值,直接 tudui.to(device)
# 损失函数
loss_fn = nn.CrossEntropyLoss() # 交叉熵,fn 是 fuction 的缩写
loss_fn = loss_fn.to(device) # 也可以不赋值,直接loss_fn.to(device)
# 优化器
learning = 0.01 # 1e-2 就是 0.01 的意思
optimizer = torch.optim.SGD(tudui.parameters(),learning) # 随机梯度下降优化器
# 设置网络的一些参数
# 记录训练的次数
total_train_step = 0
# 记录测试的次数
total_test_step = 0
# 训练的轮次
epoch = 10
# 添加 tensorboard
writer = SummaryWriter("logs")
start_time = time.time()
for i in range(epoch):
print("-----第 {} 轮训练开始-----".format(i+1))
# 训练步骤开始
tudui.train() # 当网络中有dropout层、batchnorm层时,这些层能起作用
for data in train_dataloader:
imgs, targets = data
imgs = imgs.to(device) # 也可以不赋值,直接 imgs.to(device)
targets = targets.to(device) # 也可以不赋值,直接 targets.to(device)
outputs = tudui(imgs)
loss = loss_fn(outputs, targets) # 计算实际输出与目标输出的差距
# 优化器对模型调优
optimizer.zero_grad() # 梯度清零
loss.backward() # 反向传播,计算损失函数的梯度
optimizer.step() # 根据梯度,对网络的参数进行调优
total_train_step = total_train_step + 1
if total_train_step % 100 == 0:
end_time = time.time()
print(end_time - start_time) # 运行训练一百次后的时间间隔
print("训练次数:{},Loss:{}".format(total_train_step,loss.item())) # 方式二:获得loss值
writer.add_scalar("train_loss",loss.item(),total_train_step)
# 测试步骤开始(每一轮训练后都查看在测试数据集上的loss情况)
tudui.eval() # 当网络中有dropout层、batchnorm层时,这些层不能起作用
total_test_loss = 0
total_accuracy = 0
with torch.no_grad(): # 没有梯度了
for data in test_dataloader: # 测试数据集提取数据
imgs, targets = data # 数据放到cuda上
imgs = imgs.to(device) # 也可以不赋值,直接 imgs.to(device)
targets = targets.to(device) # 也可以不赋值,直接 targets.to(device)
outputs = tudui(imgs)
loss = loss_fn(outputs, targets) # 仅data数据在网络模型上的损失
total_test_loss = total_test_loss + loss.item() # 所有loss
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy = total_accuracy + accuracy
print("整体测试集上的Loss:{}".format(total_test_loss))
print("整体测试集上的正确率:{}".format(total_accuracy/test_data_size))
writer.add_scalar("test_loss",total_test_loss,total_test_step)
writer.add_scalar("test_accuracy",total_accuracy/test_data_size,total_test_step)
total_test_step = total_test_step + 1
torch.save(tudui, "./model/tudui_{}.pth".format(i)) # 保存每一轮训练后的结果
#torch.save(tudui.state_dict(),"tudui_{}.path".format(i)) # 保存方式二
print("模型已保存")
writer.close()3.验证模型
完整的模型验证(测试,demo)套路,利用已经训练好的模型,然后给它提供输入。
import torchvision
from PIL import Image
from torch import nn
import torch
image_path = "imgs/dog.png"
image = Image.open(image_path) # PIL类型的Image
image = image.convert("RGB") # 4通道的RGBA转为3通道的RGB图片
print(image)
transform = torchvision.transforms.Compose([torchvision.transforms.Resize((32,32)),
torchvision.transforms.ToTensor()])
image = transform(image)
print(image.shape)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = nn.Sequential(
nn.Conv2d(3,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,64,5,1,2),
nn.MaxPool2d(2),
nn.Flatten(),
nn.Linear(64*4*4,64),
nn.Linear(64,10)
)
def forward(self, x):
x = self.model1(x)
return x
model = torch.load("model/tudui_29.pth",map_location=torch.device('cpu')) # GPU上训练的东西映射到CPU上
print(model)
image = torch.reshape(image,(1,3,32,32)) # 转为四维,符合网络输入需求
model.eval()
with torch.no_grad(): # 不进行梯度计算,减少内存计算
output = model(image)
output = model(image)
print(output)
print(output.argmax(1)) # 概率最大类别的输出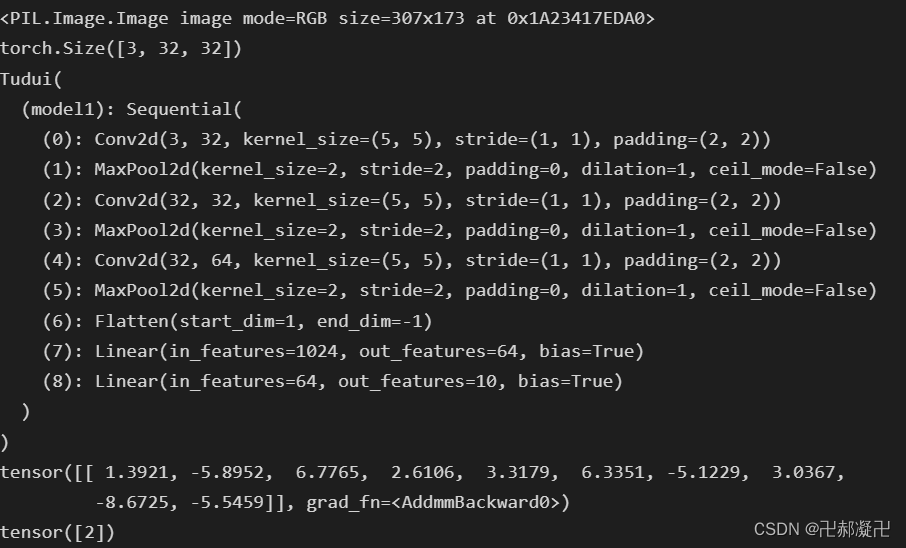















 3562
3562











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









