







 PID控制算法是自动化领域的基础,广泛应用于无人机、小车调速等。本文介绍了PID的三个组成部分:比例(P)、积分(I)和微分(D)。P决定了系统响应的速度和稳定性,D则起到缓冲作用,帮助系统快速稳定。积分I则用于修正误差,确保输出准确性。同时,文章还探讨了位置式和增量式PID的区别及计算公式。
PID控制算法是自动化领域的基础,广泛应用于无人机、小车调速等。本文介绍了PID的三个组成部分:比例(P)、积分(I)和微分(D)。P决定了系统响应的速度和稳定性,D则起到缓冲作用,帮助系统快速稳定。积分I则用于修正误差,确保输出准确性。同时,文章还探讨了位置式和增量式PID的区别及计算公式。
PID基础理解:
1.首先简单的介绍下PID
这里先提供博主的学习资源:PID算法从理论到实践 小游戏让你秒懂调参技巧 - 软件调参 - FPV帮 - 分享飞行的技巧与乐趣 (fpvbang.com)
PID是我们最常见的控制算法之一,全名为(Proportion Integration Differentiation),经常用在小车的调速、温控等方面。 其中,P(Proportion)表示比例系数,这里举无人机中的PID进行理解,当无人机的测量出自身位置与目标位置存在差距时,P在这时候就等于将无人机拉回到目标位置的动力,当P太小时,“动力不足”,无人机就无法回到我们想要它到达的位置,而当P太大时,“动力过多”,当无人机回到目标位置时,无法及时的固定住位置就被“多余的动力”带着又偏移了轨道,然后不断的执行P的操作,这就形成了无人机在目标点位置附近不断的“震荡”,P越大,“震荡”的频率也就越大。
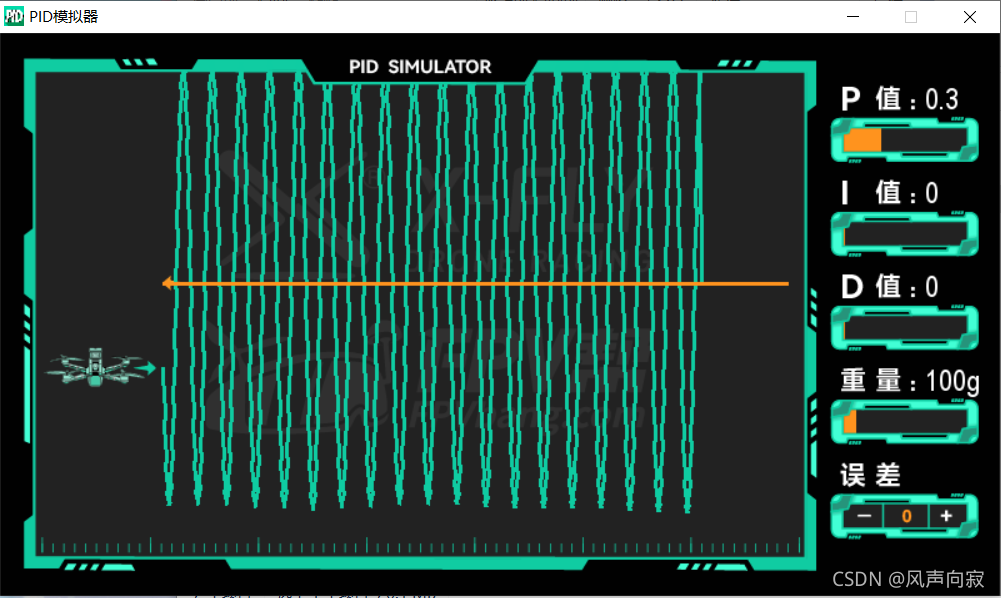
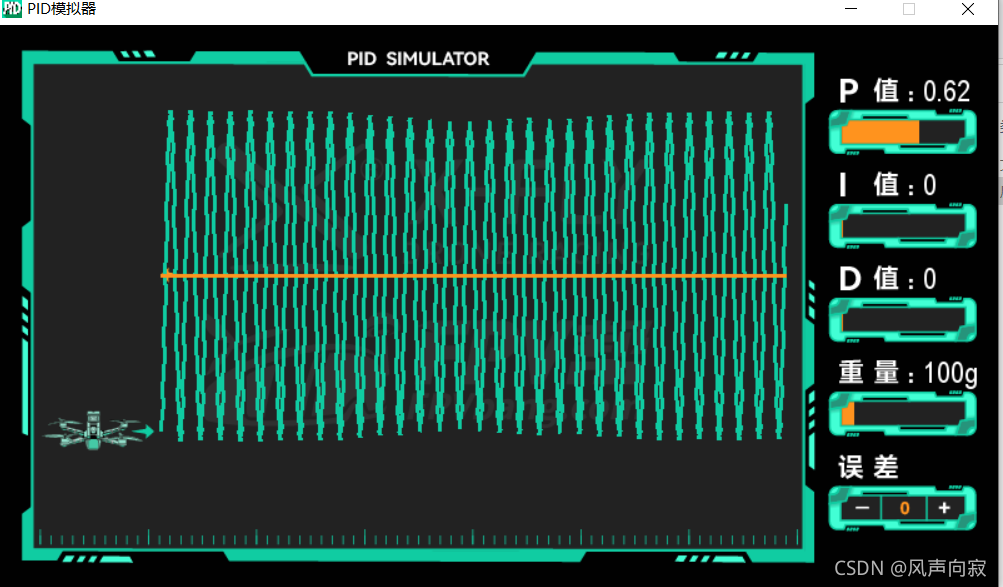
以上,是P取不同值时,无人机震荡的不同情况,可见P越大时,震动频率越大。
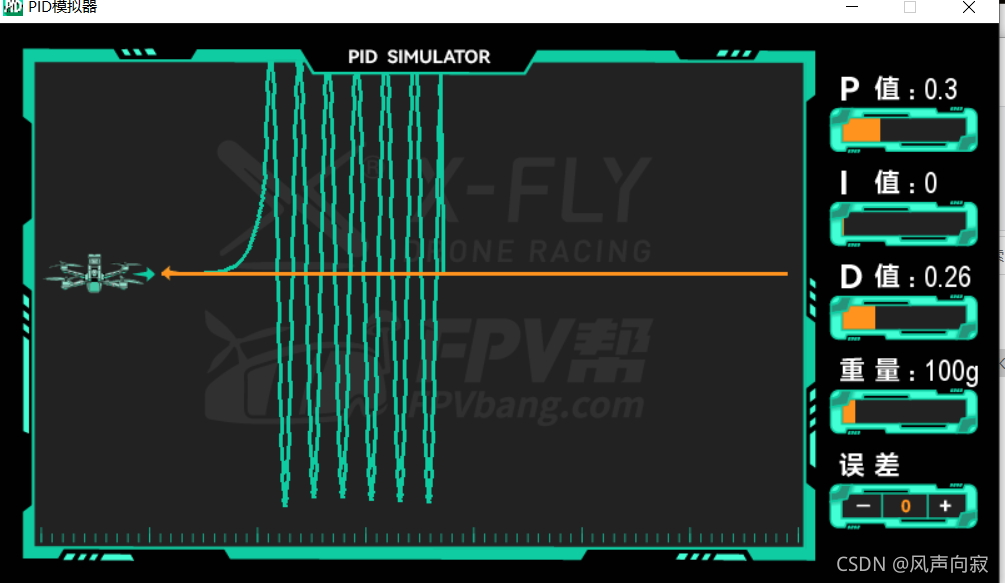
D(Differentiation)表示微分,通常用于计算无人机运动的速度。正如上述我们说的,如果P过大时,无人机因为会不断的产生震荡而无法稳定在目标位置,面对这样的情况,D的作用就大大的体现出来。D在此时的作用就相当于缓冲力(与速度方向相反),D越大时,缓冲力越大,就相当于一个震荡的物体从空气中掉入液体中,因为液体的密度比空气大,所以物体受到的缓冲力相比于在空气中的缓冲力更大,震动的幅度就大大的缩小,所以物体能更快的稳定下来。
如下图,D为0.26时,无人机受到缓冲力后稳定在目标位置。
I(Integration )表示积分,具体作用时对外界干扰或者系统存在的误差进行纠正,以确保输出的准确性。
2.PID的算法实现
PID分为位置式PID和增量式PID
其中,位置时PID是当前系统的实际位置,与你想要达到的预期位置的偏差,进行PID控制,增量型 PID,是对位置型 PID 取增量,这时控制器输出的是相邻两次采样时刻所计算的位置值之差,得到的结果是增量,即在上一次的控制量的基础上需要增加(负值意味减少)控制量。 二者所计算的对象不一样。
以下为位置式PID的计算公式:

Kp为比例系数,KI为积分系数,KD为微分系数,e(k)为误差。 e(k): 用户设定的值(目标值) - 控制对象的当前的状态值
以下为增量式PID的计算公式:

u(k)对应的是近几次位置误差的增量,而不是对应与实际位置的偏差 没有误差累加
大体的思想正如介绍中的那样,通过对e(k)给予比例系数、进行积分、微分操作,算出所需的控制量。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









