







步进电机的一些静态技术指标
相数:产生不同对极 N、S 磁场的激磁线圈对数,也可以理解为步进电机中线圈的组数。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用 n 表示,或指电机转过一个齿距角(转子同极性,不同极性就是两个齿距角)所需脉冲数,以四相电机为例,有四相四拍运行方式即 AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
齿距角:齿距角是表示两个齿距(转子)之间的夹角。
步距角:电机的步距角表示控制系统每发送一个脉冲信号,电机所转动的角度。或者说,每输入一个脉冲电信号转子转过的角度称为歩距角,也可以这样描述:定子控制绕组每改变一次通电方式,称为一拍。每一拍转子转过的机械角度称之为步距角,通常用θs表示。步距角与控制绕组的相数、转子齿数和通电方式有关。步距角越小,运转的平稳性越好。齿距角和步距角的大小均可体现步进电动机转子的运转情况。
步进电机步距角公式是步距角θ=360°/(转子齿数×运行拍数)。步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。
28BYJ-48步进电机名字的含义

28:外径28mm
B:步进电机
Y:永磁,转子是永磁的
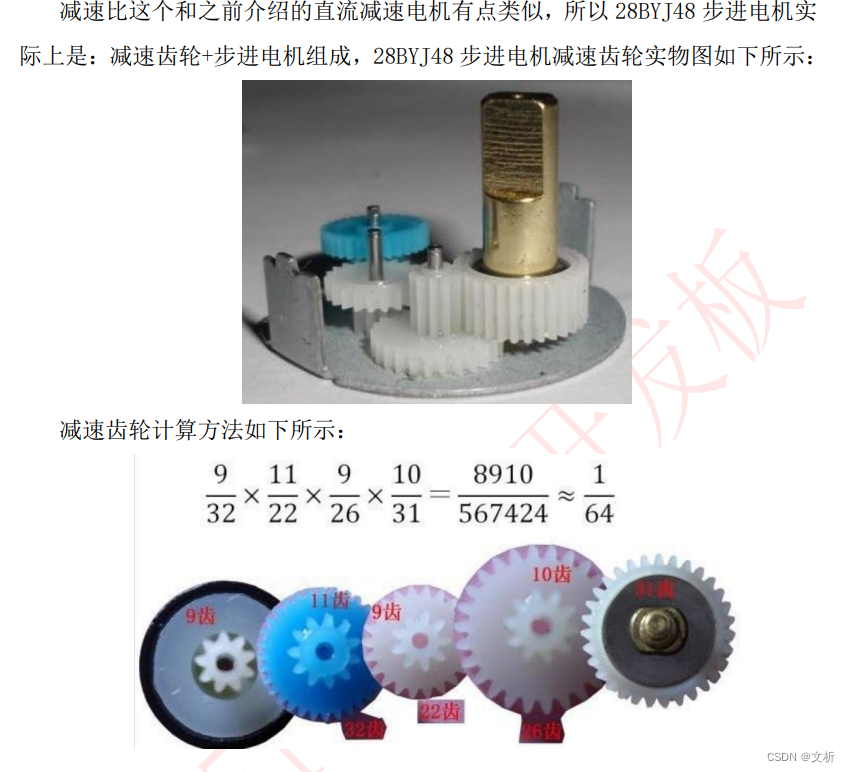
J:减速型,内部有齿轮减速
48:四相八拍
步进电机的单极性与双极性
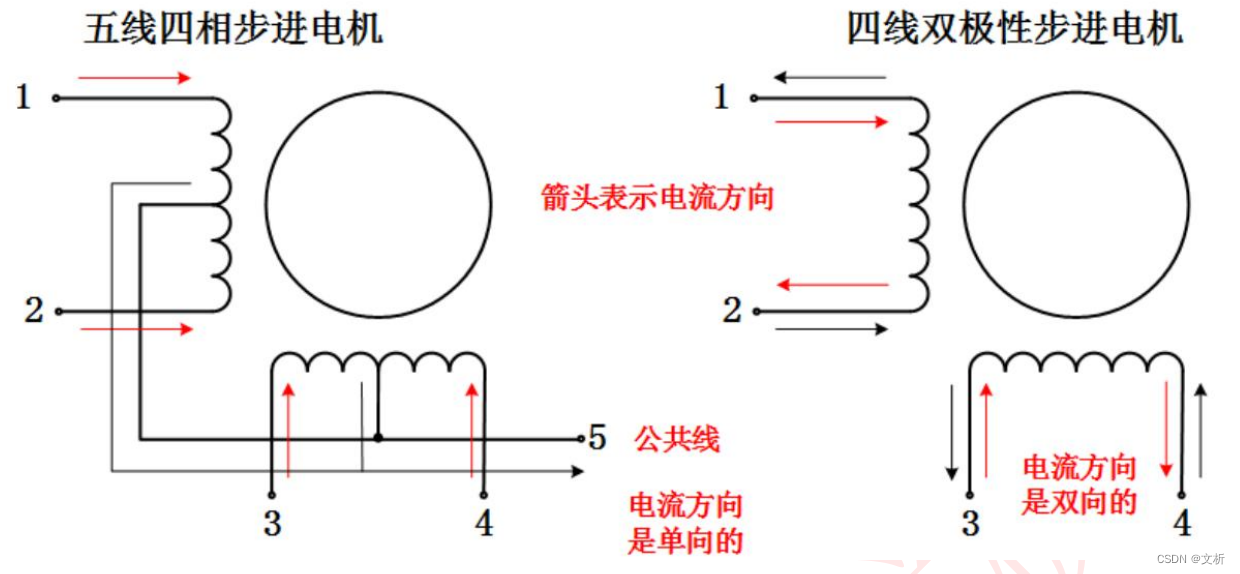
单双极性是指一个步进电机里面有几种电流的流向,左侧的五线四 相步进电机就是单极性的步进电机,图中的红色箭头为电流的走向,四根线的电 流走向汇总到公共线,所以称之为单极性电机;但是右侧则不同,电机中有两个 电流的回路,两个电流的回路自然就是双极性,所以称之为双极性电机。
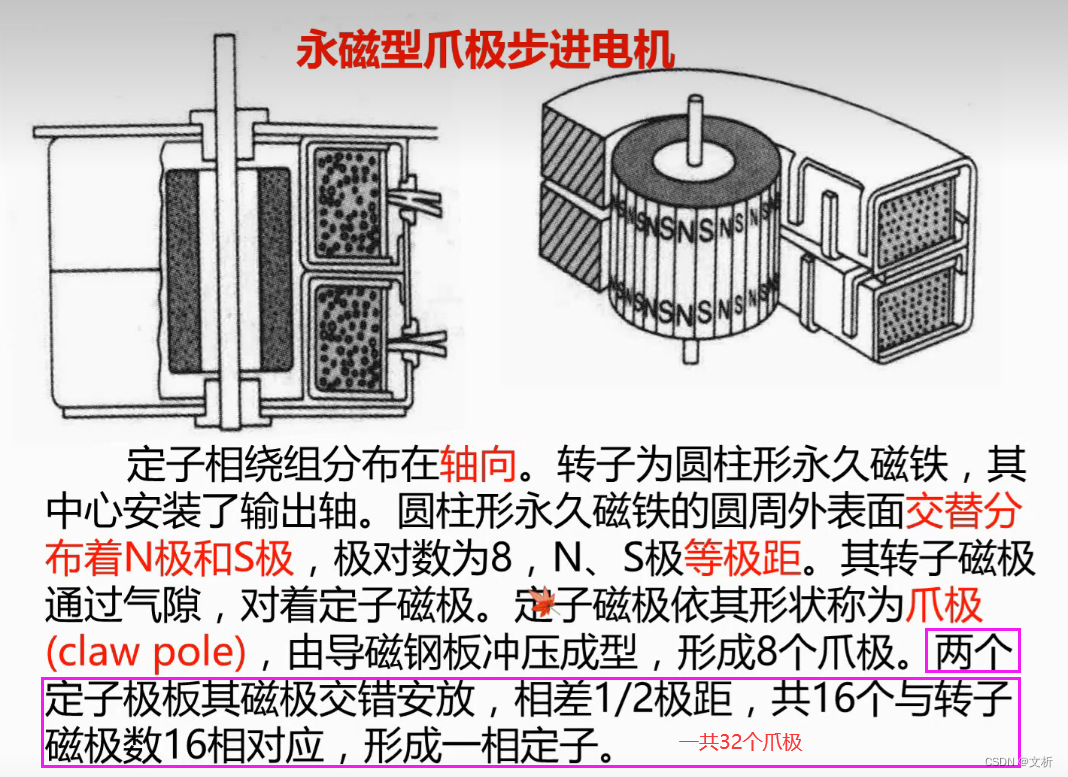
28BYJ-48步进电机的结构

28BYJ-48步进电机的工作原理
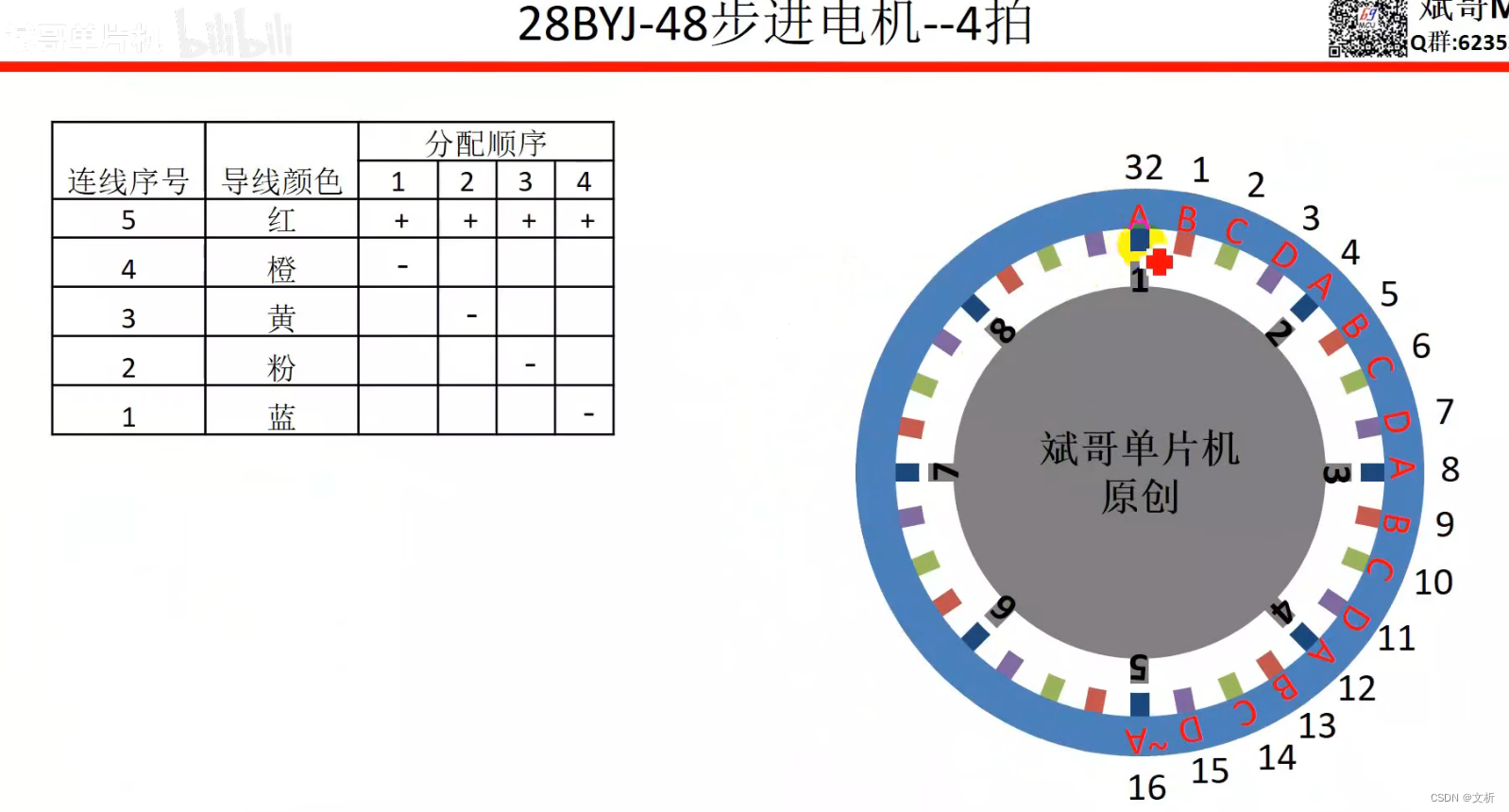
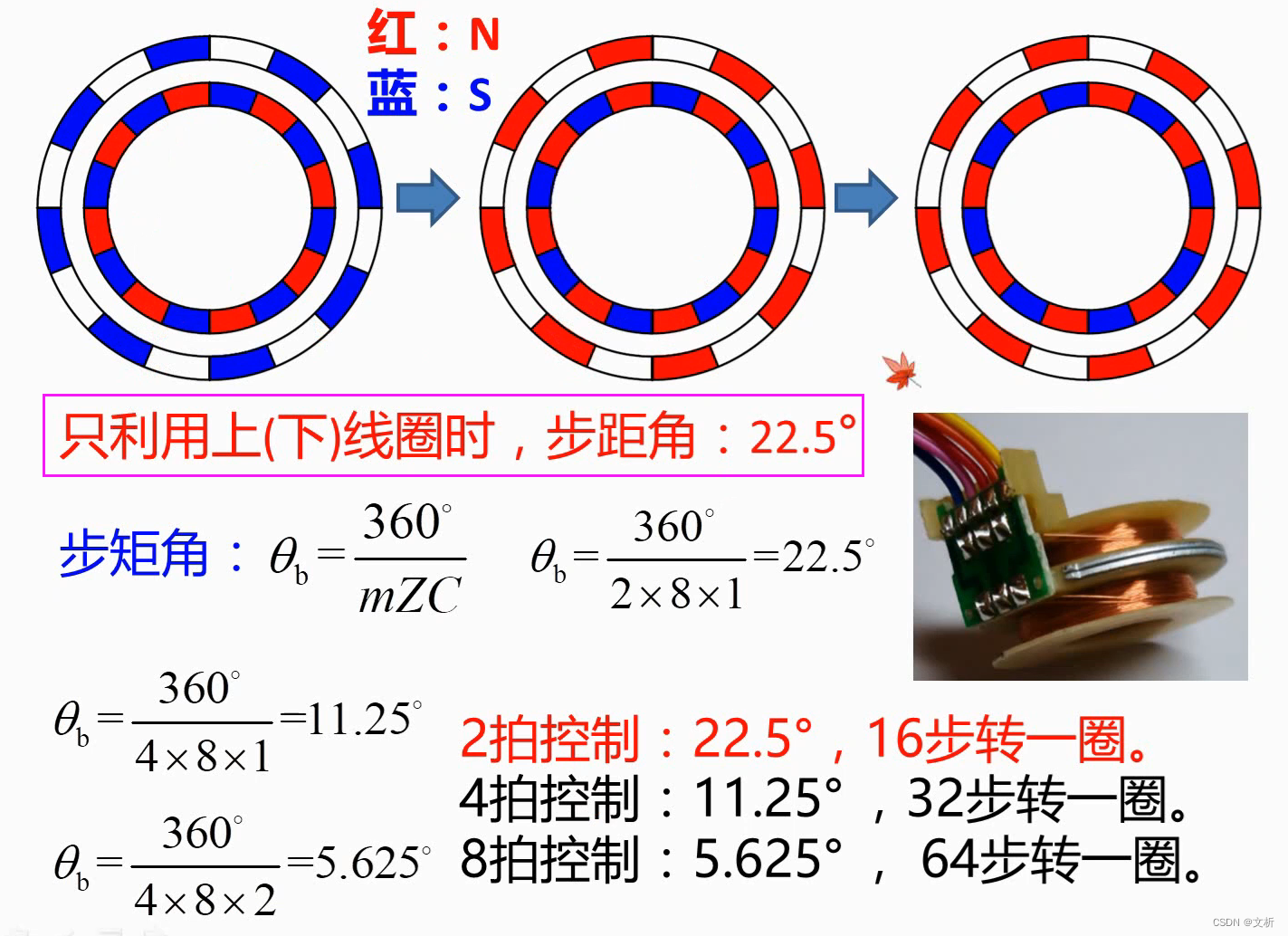
28BYJ-48步进电机是四相,每次脉冲可以对一相/两相通电,单纯的一相/两相就是4拍,一相与两相混合就可以形成8拍。故28BYJ-48步进电机运行拍数是相数的1倍/2倍。
4拍和8拍使转子转过的角度相同都是360/转子齿数=360/8=45度
几拍的实质就是完成一个磁场周期性变化所需脉冲数,转子绕定子一个齿距角(两个齿的极性要相同)需要几个脉冲(28BYJ-48转子共有16个磁极,8个N极与8个S极交错分布,一个同极性齿的中间角度是两个磁极角之和)。
28BYJ-48步进电机定子的齿数是由转子的齿数和相数决定的,齿数=转子的齿数*相数
28BY-J48步进电机的四个铁片分别位于两个线圈的上下侧,每个铁片对于8个齿(相同极性的定子),四个铁片就对应32个齿。每个齿都错开11.25度(一个齿的中心线据另一个齿中心线的角度)。
28BY-J48步进电机无减速器的最小步进角=5.625=360/8(转子齿数)*8(8拍)
28BYJ-48步进电机的步进角总结
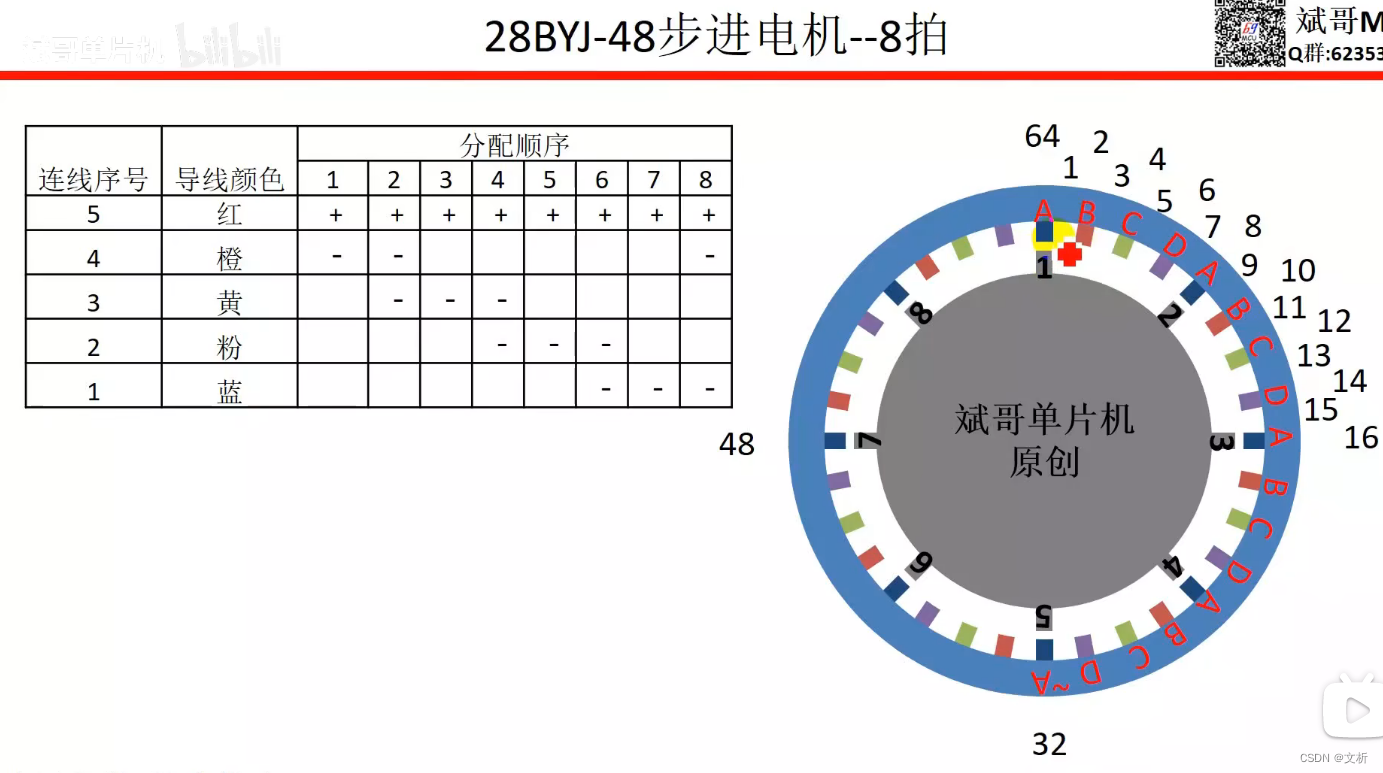
28BYJ48的8拍驱动及主要参数
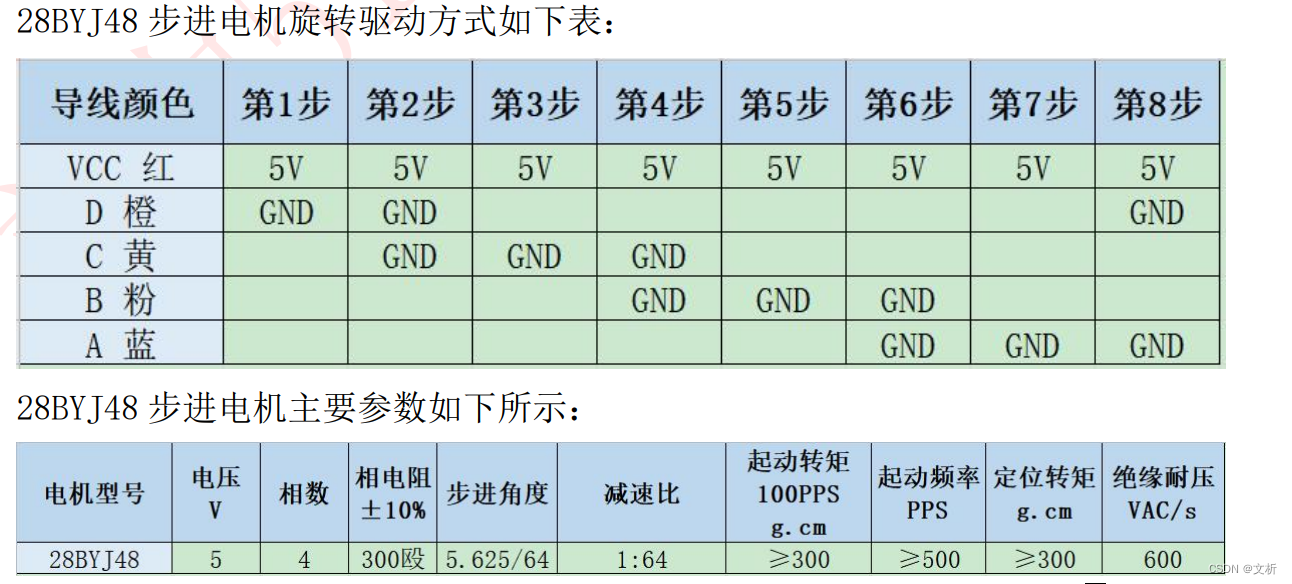
28BYJ-48的最小步进角度为5.625/64
教材中错误的原理模型
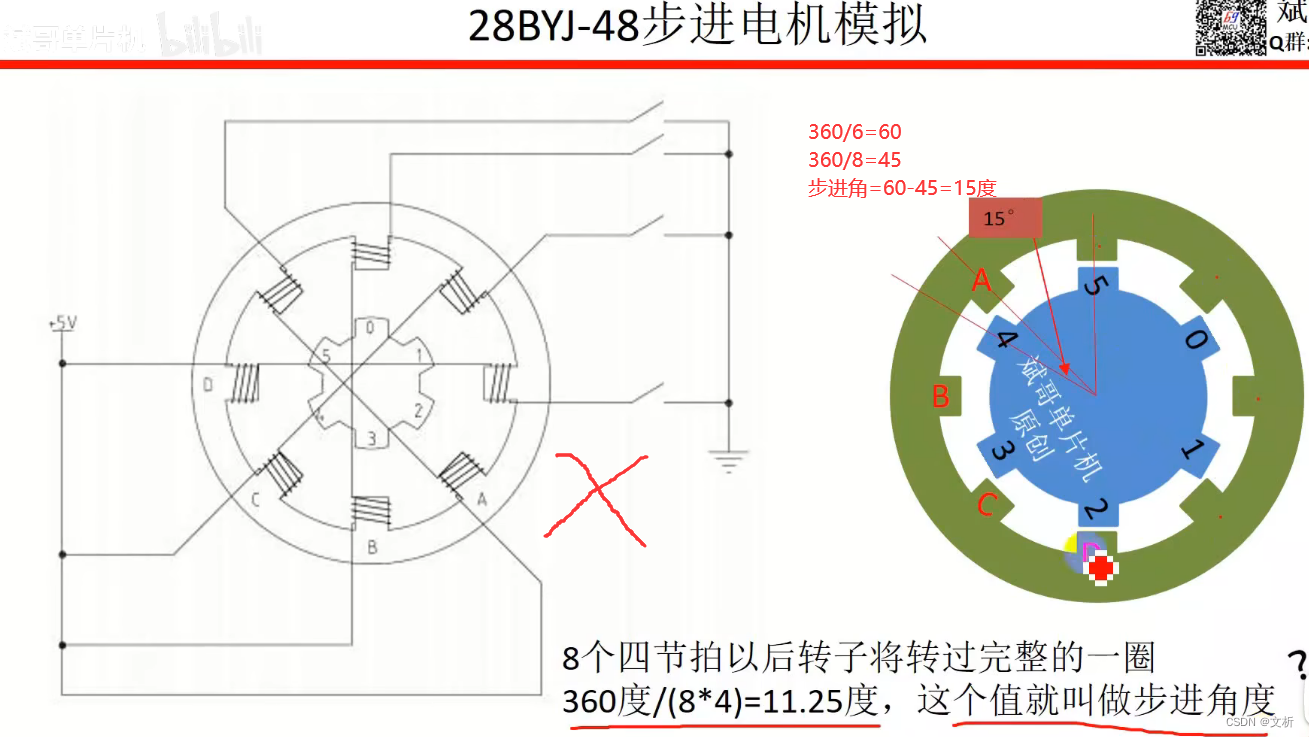
向A相通电,定子A齿和相对的齿同极性,吸引转子的4齿和1齿逆时针旋转,旋转的角度为60-45=15度,15度即步进角,依次向A、B、C、D通电,完成四拍。与资料中的11.25度不符,可见上图并不是28BY-J48的实际原理图。
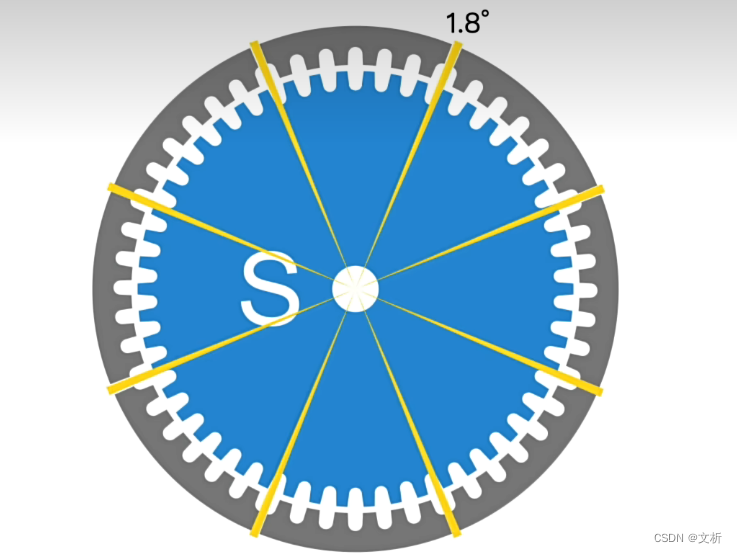
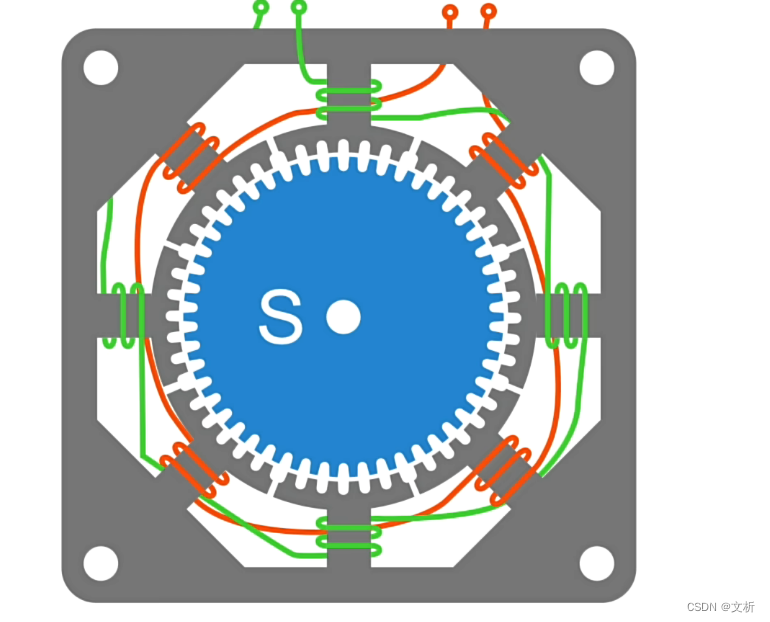
另一种步进电机(没有减速器,步进角为1.8度)
双极性,定子8齿,2相
1.8=360/50(转子齿数)*4(4拍)

















 4178
4178

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









