






5.1图像退化/复原过程的模型
5.1.1 什么是图像的退化
图像退化,是指图像在形成、存储、处理和传输过程中,由于成像系统、存储设备、处理方法和传输介质的不完善,从而导致的图像质量下滑。
5.1.2引起成像退化的原因
成像系统焦散、成像设备与物体的相对运动、成像器材的固有缺陷、外部干扰等等
5.1.3什么是图像的复原
图像复原也称图像恢复,指的是对退化的图像进行处理,试图恢复降质的图像,还原真面目。
5.1.4图像复原与图像退化的关系
图像复原可以看作是图像退化的逆过程,是将图像退化的过程加以估计,建立退化的数学模型后,补偿退化过程造成的降质。
在图像退化过程确知的情况下,图像退化的逆过程是有可能进行的。但实际情况经常是退化过程并不知晓,这种复原称为盲目复原。
由于图像模糊的同时,噪声和干扰也会同时存在,这也为复原带来了困难和不确定性。
5.1.5图像复原与图像增强的比较
1.相同点
与图像增强相似,图像复原的目的也是改善图像质量;
图像复原与图像增强均可以使用空间域或频率域滤波实现。
2.区别
图像增强主要是一个主观过程,而图像复原主要是一个客观过程;
图像增强被认为是一种对比度拉伸,提高图像的视觉质量;而图像复原技术根据相应的退化模型和知识来获取恢复原始图像的最优估值。
5.1.6图像退化/复原模型
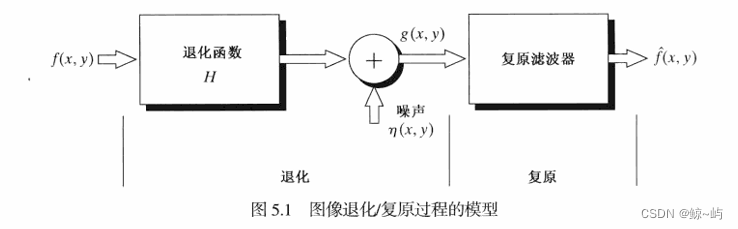
图像复原即在给定的和H的基础上得到对
的某个近似,通常采用线性的、空间不变的复原技术。
如果退化系统(函数)H是线性空间不变系统:
(1)线性:
- 齐次性:
叠加性:
(2)空间不变性:,即图像中任一像素点通过退化系统时的响应只取决于该点的输入值,而与该点的位置无关。
退化图像可以表示为:
空间模型:
,*表示卷积,h(x,y)表示空域退化函数;
频域模型:
,H(u,v)表示频域退化函数。
5.2 噪声模型
5.2.1噪声的概述
噪声是图像中不希望有(或不需要)的部分,是最常见的退化因素之一;对信号来说,噪声是一种外部干扰(但噪声本身也是一种信号,携带了噪声源的信息)。数字图像的噪声主要来源于图像的获取和传输过程。
获取图像的数字化过程,如图像传感器的质量和环境条件;
图像传输过程中传输信道的噪声干扰,如无线网络传输的图像会受到光或其它大气因素的干扰。
5.2.2噪声的模型
图像中的噪声是随机的,其灰度值的统计特性可以用概率密度函数(PDF)或相应的累计分布函数(CDF)进行表征。
对于退化图像中的噪声n(x,y),有多种不同的统计模型:均匀噪声、指数噪声、高斯噪声、瑞利噪声、伽马噪声、脉冲(椒盐)噪声、周期噪声。

1.均匀噪声
均匀噪声的概率密度函数(PDF):
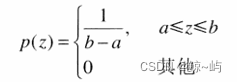
式中,z表示噪声灰度值,,
表示区间[0,1]内的均匀随机数。噪声(灰度值)均值为
,噪声灰度值方差为
。
2.指数噪声
指数噪声的概率密度函数(PDF):
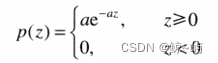
式中,,
,
表示区间[0,1]内的均匀随机数。噪声均值为
;噪声方差为
。
3.高斯噪声
高斯噪声的概率密度函数(PDF):
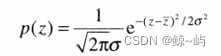
式中,表示噪声均值,
表示噪声方差,
,
表示标准正态分布的随机数。
高斯噪声的灰度值有70%落在范围之内。
4.瑞利噪声
瑞利噪声的概率密度函数(PDF):
式中,,
表示区间[0,1]内的均匀随机数。噪声均值为
,噪声方差为
。
5.伽马(爱尔兰)噪声
伽马噪声的概率密度函数(PDF):

式中,且
为正整数,“!”表示阶乘,
,
是具有参数a的指数随机数。噪声均值为
,噪声方差为
。
6.脉冲(椒盐)噪声
椒盐噪声的概率密度函数(PDF):
如果或
为零,则脉冲噪声称为单极脉冲;如果
或
均不为零,则脉冲噪声称为双极脉冲噪声或椒盐噪声。在数字图像中,脉冲噪声通常被数字化为最小值或最大值(纯黑或纯白),即a、b等于所允许的最小值和最大值,例如8比特图像,a=0(黑)、b=255(白)。

5.3空间域滤波复原
5.3.1.空间域滤波复原的方法
当一幅图像中存在的唯一退化因素是噪声时,其退化模型如下:
空间模型:
频域模型:
可以选择空域滤波的方法来复原图像,常见的空域滤波器有均值滤波器、中值滤波器、最大值滤波器、最小值滤波器、中点滤波器以及自适应滤波器等。
均值滤波器和中点滤波器适合于处理高斯或均匀等随机噪声;
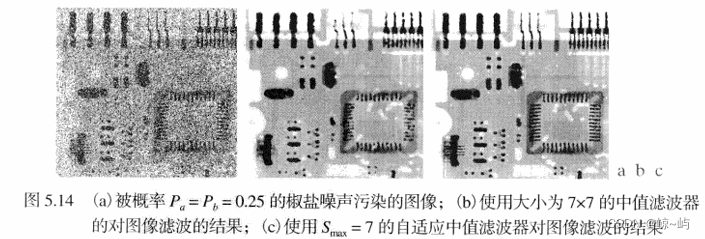
5.3.2.自适应滤波器
该类滤波器的自适应滤波行为基于由矩形窗口
定义的区域内图像的统计特性。与前述滤波器相比,该类滤波器性能更优,但也增加了算法复杂性。该类滤波器的响应基于以下4个量:
:表示噪声图像g的任意像素点的灰度值;
:整幅图像g的噪声方差;
:在区域
上像素点的灰度局部均值;
:在区域
滤波器的预期性能如下:
,滤波器返回
,滤波器返回区域
基于上述预期性能,假设噪声是加性和位置无关的,且,则滤波器的自适应输出的表达式:
。唯一需要估计的未知量
,其它参数可以从区域
中的像素计算出来。
5.4 退化函数的估计
频率退化模型:
图像复原的主要目的是在给定退化图像以及退化函数H和噪声
的前提下,对原始图像
进行估计。
在进行图像复原时首先估计退化函数(即点扩散函数,PSF),一般的估计方法由三种:图像观察估计法、试验估计法、模型估计法。
5.4.1.图像观察估计法
在没有关于退化函数H的先验知识的情况下,通过收集图像自身的信息,从而实现退化函数的估计:
;
,它和观察的子图像
,即
,
、
分别为
、
的
。
5.4.2.试验估计法
使用与退化图像的成像设备相似的装置,以此装置成像一个脉冲(即小亮点),得到一个退化的冲激响应,从而实现较准确的退化估计。由于冲激的傅里叶变换为常数,故,A为常量,表示脉冲强度。

5.4.3.模型估计法
从基本原理开始,推导一个数学模型,以此数学模型建立退化函数的估计。
1.焦散模糊
其中,R是散焦半径,经过傅里叶变换为:
式中,是一阶第一类贝塞尔函数,
是圆对称的。
2.运动模糊
T为采集时间长度(也即曝光时间)
a、b分别为垂直、水平方向的运动距离

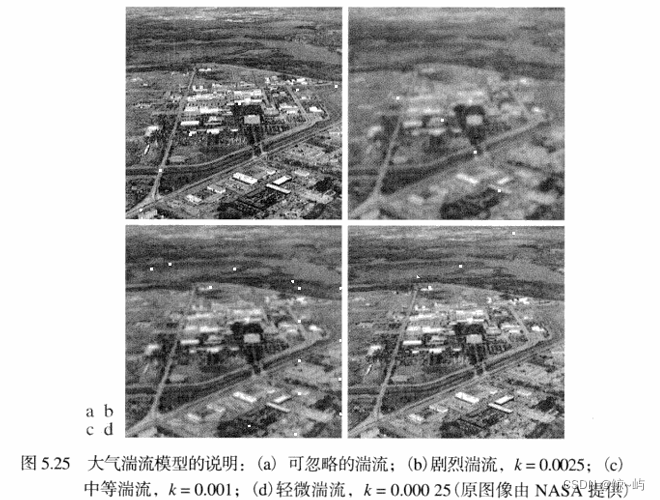
3.大气湍流模糊
将引起退化的环境因素考虑在内
常数k与湍流的性质有关,k越大,湍流越剧烈。
5.5 常见的图像复原方法——逆滤波
逆滤波是复原退化图像的最简单方法,即利用退化图像的傅里叶变换结果除以频域退化函数:,
为原始图像的傅里叶变换结果的估计。
优点:算法比较简单

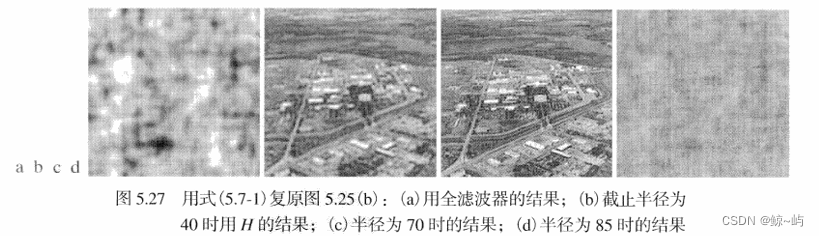
根据上图所示,进一步增大半径值,会使得图像越来越模糊。此外,这个例子的结果表明,一般直接逆滤波的性能是较差的。
5.6常见的图像复原方法——维纳滤波
5.6.1.维纳滤波器
维纳滤波器综合了退化函数和噪声统计特性两个方面进行复原处理。它还引入最小二乘约束条件,使得复原的结果图像与原始的未退化图像
之间的均方误差最小:
经过最小均方误差滤波器(即维纳滤波器)可得:
式中,为退化函数,
为
的功率谱,s为最小二乘约束条件的拉格朗日常数,
为噪声的功率谱,
为未退化图像的功率谱,
为噪信功率比。
如果退化图像具有较低的噪信功率比,则维纳滤波器
近似为逆滤波器
如果噪声为0,则维纳滤波退化为逆滤波
如果噪信功率比未知或不能估计,则维纳滤波器可近似为:
,其中,K表示一个交互的标量常数。
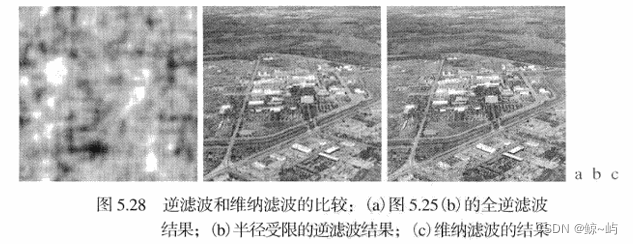
5.6.2.维纳滤波与逆滤波的比较
逆滤波算法简单,但去模糊能力不强,且忽略噪声影响;
维纳滤波去模糊效果由于逆滤波,且具备去噪能力,但需要知道未退化图像和噪声的功率谱;
维纳滤波建立在最小化统计准则的基础上,滤波结果只是平均意义上的最优。
参考文献:数字图像处理(第四版)冈萨雷斯















 5826
5826

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









