






UART总线通讯协议
一、串口通讯协议层
串口通讯的数据包由发送设备通过自身的TXD接口传输到接收设备的RXD接口。在串口通讯的协议层中,规定了数据包的内容,它由启始位、主体数据、校验位以及停止位组成,通讯双方的数据包格式要约定一致才能正常收发数据,其组成见图 206。

图 206 串口数据包的基本组成
1. 波特率
本章中主要讲解的是串口异步通讯,异步通讯中由于没有时钟信号(如前面讲解的DB9接口中是没有时钟信号的),所以两个通讯设备之间需要约定好波特率,即每个码元的长度,以便对信号进行解码,图 206中用虚线分开的每一格就是代表一个码元。常见的波特率为4800、9600、115200等。
2. 通讯的起始和停止信号
串口通讯的一个数据包从起始信号开始,直到停止信号结束。数据包的起始信号由一个逻辑0的数据位表示,而数据包的停止信号可由0.5、1、1.5或2个逻辑1的数据位表示,只要双方约定一致即可。
3. 有效数据
在数据包的起始位之后紧接着的就是要传输的主体数据内容,也称为有效数据,有效数据的长度常被约定为5、6、7或8位长。
4. 数据校验
在有效数据之后,有一个可选的数据校验位。由于数据通信相对更容易受到外部干扰导致传输数据出现偏差,可以在传输过程加上校验位来解决这个问题。校验方法有奇校验(odd)、偶校验(even)、0校验(space)、1校验(mark)以及无校验(noparity),它们介绍如下:
奇校验要求有效数据和校验位中"1"的个数为奇数,比如一个8位长的有效数据为:01101001,此时总共有4个"1",为达到奇校验效果,校验位为"1",最后传输的数据将是8位的有效数据加上1位的校验位总共9位。
偶校验与奇校验要求刚好相反,要求帧数据和校验位中"1"的个数为偶数,比如数据帧:11001010,此时数据帧"1"的个数为4个,所以偶校验位为"0"。
0校验是不管有效数据中的内容是什么,校验位总为"0",1校验是校验位总为"1"。
在无校验的情况下,数据包中不包含校验位。
I2C总线通讯协议
1. I2C总线简介
I2C是Inter-Integrated Circuit的简称,读作:I-squared-C。由飞利浦公司于1980年代提出,为了让主板、嵌入式系统或手机用以连接低速周边外部设备而发展。
主要用途:
SOC和周边外设间的通信(如:EEPROM,电容触摸芯片,各种Sensor等)。
1.1 物理接口
I2C总线只使用两条双向漏极开路的信号线(串行数据线:SDA,及串行时钟线:SCL),并利用电阻上拉。I2C总线仅仅使用SCL、SDA两根信号线,就实现了设备间的数据交互,极大地简化了对硬件资源和PCB板布线空间的占用。I2C总线广泛应用在EEPROM、实时时钟、LCD、及其他芯片的接口。I2C允许相当大的工作电压范围,典型的电压基准为:+3.3V或+5V。
SCL(Serial Clock):串行时钟线,传输CLK信号,一般是主设备向从设备提供 SDA(Serial Data):串行数据线,传输通信数据
I2C总线接口内部结构如下图所示:

I2C使用一个7bit的设备地址,一组总线最多和112个节点通信。最大通信数量受限于地址空间及400pF的总线电容。
常见的I2C总线以传输速率的不同分为不同的模式:标准模式(100Kbit/s)、低速模式(10Kbit/s)、快速模式(400Kbit/s)、高速模式(3.4Mbit/s),时钟频率可以被下降到零,即暂停通信。
该总线是一种多主控总线,即可以在总线上放置多个主设备节点,在停止位(P)发出后,即通讯结束后,主设备节点可以成为从设备节点。
主设备节点:产生时钟并发起通信的设备节点 从设备节点:接收时钟并响应主设备节点寻址的设备节点
1)I2C通信双方地位不对等,通信由主设备发起,并主导传输过程,从设备按I2C协议接收主设备发送的数据,并及时给出响应。 2)主设备、从设备由通信双方决定(I2C协议本身无规定),既能当主设备,也能当从设备(需要软件进行配置)。 3)主设备负责调度总线,决定某一时刻和哪个从设备通信。同一时刻,I2C总线上只能有一对主设备、从设备通信。 4)每个I2C从设备在I2C总线通讯中有一个I2C从设备地址,该地址唯一,是从设备的固有属性,通信中主设备通过从设备地址来找到从设备。
I2C总线多主设备结构如下图所示:

1.2 通讯特征
串行、同步、非差分、低速率
1)串行通信,所有的数据以位为单位在SDA线上串行传输 2)同步通信,即双方工作在同一个时钟下,一般是通信的A方通过一根CLK信号线,将A设备的时钟传输到B设备,B设备在A设备传输的时钟下工作。同步通信的特征是:通信线中有CLK。 3)非差分,I2C通信速率不高,且通信距离近,使用电平信号通信。 4)低速率,I2C一般是同一个板子上的两个IC芯片间通信,数据量不大,速率低。速率:几百KHz,速率可能不同,不能超过IC的最高速率。
1.3 I2C总线状态
I2C总线上有两种状态:
空闲态:没有设备发生通信。 忙态:其中一个从设备和主设备通信,I2C总线被占用,其他从设备处于等待状态。
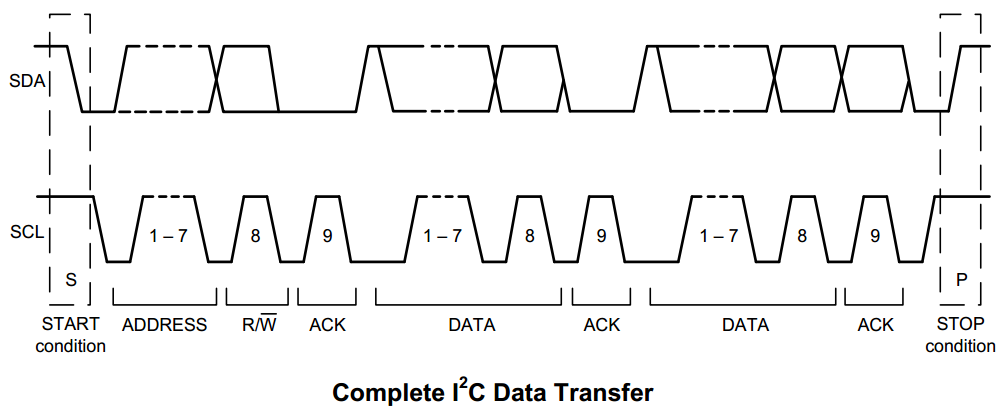
2. I2C总线通信协议
时序:在通信中时序是通信线上按时间顺序发生的电平变化,及这些电平变化对通信的意义。
每个通信周期都由一个起始位开始通信,由一个结束位结束通信,中间部分是传递的数据。
每个通信周期,主设备会先发8位的从设备地址(从设备地址由高7位的实际从设备地址和低1位的读/写标志位组成),主设备以广播的形式发送从设备地址,I2C总线上的所有从设备收到地址后,判断从设备地址是否匹配,不匹配的从设备继续等待,匹配的设备发出一个应答信号。
同一时刻,主设备、从设备只能有一个设备发送数据。
2.1 起始位和结束位
I2C总线通讯由起始位开始通讯,由结束位停止通讯,并释放I2C总线。起始位和结束位都由主设备发出。 起始位(S):在SCL为高电平时,SDA由高电平变为低电平 结束位(P):在SCL为高电平时,SDA由低电平变为高电平
如下图所示:

2.2 数据格式与应答
I2C数据以字节(即8bits)为单位传输,每个字节传输完后都会有一个ACK应答信号。应答信号的时钟是由主设备产生的。
应答(ACK):拉低SDA线,并在SCL为高电平期间保持SDA线为低电平 非应答(NOACK):不要拉低SDA线(此时SDA线为高电平),并在SCL为高电平期间保持SDA线为高电平
在传输期间,如果从设备来不及处理主设备发送的数据,从设备会保持SCL线为低电平,强迫主设备等待从设备释放SCL线,直到从设备处理完后,释放SCL线,接着进行数据传输。
如下图所示:

2.3 数据传输通讯
1)写数据
开始数据传输后,先发送一个起始位(S),主设备发送一个地址数据(由7bit的从设备地址,和最低位的写标志位组成的8bit字节数据,该读写标志位决定数据的传输方向),然后,主设备释放SDA线,并等待从设备的应答信号(ACK)。每一个字节数据的传输都要跟一个应答信号位。数据传输以停止位(P)结束,并且释放I2C总线。
2)读数据
开始通讯时,主设备先发送一个起始信号(S),主设备发送一个地址数据(由7bit的从设备地址,和最低位的写标志位组成的8bit字节数据),然后,主设备释放SDA线,并等待从设备的应答信号(ACK),从设备应答主设备后,主设备再发送要读取的寄存器地址,从设备应答主设备(ACK),主设备再次发送起始信号(Sr),主设备发送设备地址(包含读标志),从设备应答主设备,并将该寄存器的值发送给主设备;
读取单字节数据: 主设备要读取的数据,如果是只有一个字节的数值,就要结束应答,主设备要先发送一个非应答信号(NOACK),再发送结束信号(P); 读取多字节数据: 主设备要读取的数据,如果是大于一个字节的多个数据,就发送ACK应答信号(ACK),而不是非应答信号(NOACK),然后主设备再次接收从设备发送的数据,依次类推,直到主设备读取的数值是最后一个字节数据后,需要主设备给从设备发送非应答信号(NOACK),再发送结束信号(P),结束I2C通讯,并释放I2C总线。
注意:所有的数据传输过程中,SDA线的电平变化必须在SCL为低电平时进行,SDA线的电平在SCL线为高电平时要保持稳定不变。如下图所示:

SPI总线通讯协议
1、什么是SPI?
SPI是串行外设接口(Seria Peripheral Interface)的缩写。是 Motorola 公司推出的一 种同步串行接口技术,是一种高速的,全双工,同步的通信总线。
2、SPI优点
支持全双工通信 通信简单 数据传输速率块
3、缺点
没有指定的流控制,没有应答机制确认是否接收到数据,所以跟IIC总线协议比较在数据 可靠性上有一定的缺陷。
4、特点
I2C:串行、同步、非差分、低速率
1):高速、同步、全双工、非差分、总线式 2):主从机通信模式
5、协议通信时序详解
1):SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多 个从设备,需要至少4根线,事实上3根也可以(单向传输时)。也是所有基于SPI的设备共 有的,它们是SDI(数据输入)、SDO(数据输出)、SCLK(时钟)、CS(片选)。 (1)SDO/MOSI – 主设备数据输出,从设备数据输入; (2)SDI/MISO – 主设备数据输入,从设备数据输出; (3)SCLK – 时钟信号,由主设备产生; (4)CS/SS – 从设备使能信号,由主设备控制。当有多个从设备的时候,因为每个从设 备上都有一个片选引脚接入到主设备机中,当我们的主设备和某个从设备通信时将需 要将从设备对应的片选引脚电平拉低或者是拉高。

2):需要说明的是,我们SPI通信有4种不同的模式,不同的从设备可能在出厂是就是配 置为某种模式,这是不能改变的;但我们的通信双方必须是工作在同一模式下,所以我们 可以对我们的主设备的SPI模式进行配置,通过CPOL(时钟极性)和CPHA(时钟相位)来 控制我们主设备的通信模式,具体如下: Mode0:CPOL=0,CPHA=0 Mode1:CPOL=0,CPHA=1 Mode2:CPOL=1,CPHA=0 Mode3:CPOL=1,CPHA=1
时钟极性CPOL是用来配置SCLK的电平出于哪种状态时是空闲态或者有效态,时钟相位CPHA 是用来配置数据采样是在第几个边沿: CPOL=0,表示当SCLK=0时处于空闲态,所以有效状态就是SCLK处于高电平时 CPOL=1,表示当SCLK=1时处于空闲态,所以有效状态就是SCLK处于低电平时 CPHA=0,表示数据采样是在第1个边沿,数据发送在第2个边沿 CPHA=1,表示数据采样是在第2个边沿,数据发送在第1个边沿
例如: CPOL=0,CPHA=0:此时空闲态时,SCLK处于低电平,数据采样是在第1个边沿,也就是 SCLK由低电平到高电平的跳变,所以数据采样是在上升沿,数据发送是在下降沿。
CPOL=0,CPHA=1:此时空闲态时,SCLK处于低电平,数据发送是在第1个边沿,也就是 SCLK由低电平到高电平的跳变,所以数据采样是在下降沿,数据发送是在上升沿。
CPOL=1,CPHA=0:此时空闲态时,SCLK处于高电平,数据采集是在第1个边沿,也就是 SCLK由高电平到低电平的跳变,所以数据采集是在下降沿,数据发送是在上升沿。
CPOL=1,CPHA=1:此时空闲态时,SCLK处于高电平,数据发送是在第1个边沿,也就是 SCLK由高电平到低电平的跳变,所以数据采集是在上升沿,数据发送是在下降沿。

需要注意的是:我们的主设备能够控制时钟,因为我们的SPI通信并不像UART或者IIC通信 那样有专门的通信周期,有专门的通信起始信号,有专门的通信结束信号;所以我们的 SPI协议能够通过控制时钟信号线,当没有数据交流的时候我们的时钟线要么是 保持高电平要么是保持低电平。
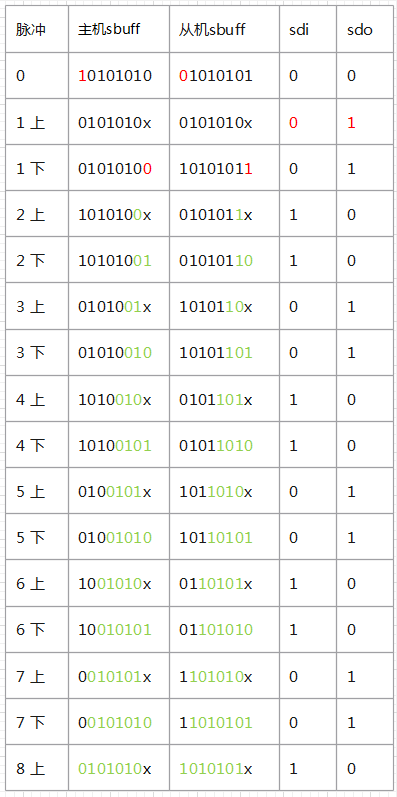
6、内部工作机制

我们知道, 在每个时钟周期内, Master 与 Slave 之间交换的数据其实都是 SPI 内部移位寄存器从 SSPBUF 里面拷贝的 . 我们可以通过往 SSPBUF 对应的寄存器 (Tx-Data / Rx-Data register) 里读写数据, 间接地操控 SPI 设备内部的 SSPBUF。
例如, 在发送数据之前, 我们应该先往 Master 的 Tx-Data 寄存器写入将要发送出去的数据, 这些数据会被 Master-SSPSR 移位寄存器根据 Bus-Width 自动移入 Master-SSPBUF 里, 然后这些数据又会被 Master-SSPSR 根据 Channel-Width 从 Master-SSPBUF 中移出, 通过 Master-SDO 管脚传给 Slave-SDI 管脚, Slave-SSPSR 则把从 Slave-SDI 接收到的数据移入 Slave-SSPBUF 里 . 与此同时, Slave-SSPBUF 里面的数据根据每次接收数据的大小(Channel-Width), 通过 Slave-SDO 发往 Master-SDI, Master-SSPSR 再把从 Master-SDI 接收的数据移入 Master-SSPBUF. 在单次数据传输完成之后, 用户程序可以通过从 Master 设备的 Rx-Data 寄存器读取 Master 设备数据交换得到的数据。

一、SCCB简介
SCCB(Serial Camera Control Bus)是OmniVision公司公布的串行相机总线协议。OV开头的相机模块例如OV7670都使用SCCB协议。鉴于它与I2C协议类似,为了方便,本文将其SIO_C线称为SCL,SIO_D线称为SDA。主要讲解两线SCCB协议的内容与程序实现。
二、电路连接图
对于两线SCCB,只需连接SIO_C和SIO_D即可。 
三、协议的内容与程序实现
②两线SCCB总线协议分析: <1>传输开始标志:每次传输(无论是读数据还是写数据),都要由主机操作总线,按时序图向SDA和SCL输出规定电平,这样从机在接收到相应电平时会知道数据的传输将要开始。
传输开始的标志为:在SCL保持高电平期间,SDA完成高电平到低电平的转变,随后SCL恢复低电平。 
void SCCB_Start(void)
{
SCCB_SDA=1;
SCCB_SCL=1;
delay_us(50);
SCCB_SDA=0;
delay_us(50); //并不是必须为50us,不要太短即可
SCCB_SCL=0;
}<2>传输结束标志: 通知从机一次传输过程结束。标志:在SCL为高电平期间,SDA由低电平向高电平的转变 
void SCCB_Stop(void)
{
SCCB_SDA=0;
delay_us(50);
SCCB_SCL=1;
delay_us(50);
SCCB_SDA=1;
delay_us(50);
} <3>传输相(Transmission Phases): 传输相是每次数据传输的一个基本单元。它由九个bit组成,其中高bit在前。第一位到第八位为bit7-bit0,第九位为Don’t care bit或NA bit。Don’t care bit及NA bit的具体含义将在下面介绍具体的相时介绍。而第九位究竟是Don’t care bit还是NA bit是由传输相的内容决定的,不同的相有不同的规定,也将在下面介绍具体的每一个相时进行说明。 

<4>写操作: 每向从机写一个字节数据称为一次写操作,但要向从机写入我们想要的一个字节数据前,还要告诉从机ID号是多少,将要写入数据的寄存器编号(Sub-Address)是多少,因此写操作的一个过程由三个相(Phase)组成。
相1:向从机发送从机的ID号,SCCB协议支持一个主机和多个从机,因此这一个相是为了区分不同的从机,但如果我们只连接了一个从机时,也必须执行这样一个过程。实际上ID Address有8bit,其中bit7-bit1为从机的ID号,大小为0-127,一共能区分128个从机。OV7670的ID号为0x42。而bit0是用来区分该相所在的cycle是向从机写数据还是读数据,bit0=0代表写数据,bit0=1代表读数据,由于我们要向从机写数据,因此bit0应为0。而相1中紧跟在ID Address这8位数据后的第九位是一个Don’t care bit(图中打X的位)。对于OV7670来说,从机在接收到主机送来的8bit数据后,将在SCL=1的期间,在SDA引脚输出低电平。在这期间,主机就可以读取SDA上的电平并进行判断,如果读取到低电平,表示从机已经顺利接收到了相1中的前8bit数据。说明数据传输成功,否则说明传输失败。
相2:向从机发送将要写入数据的寄存器的编号,寄存器的编号在OV传感器的数据手册上都能找到。寄存器的编号是一个8bit的数据。同样地,相2的第9bit也是一个Don’t care bit(图中打X的位),对该位的说明与相1相同
相3:前面两个相指定了数据传输的从机ID以及要写入数据的寄存器的编号,这时候在第三个相就可以向前面指定的寄存器写入数据了。bit7-bit0是我们希望写入寄存器的数据。而第9bit也是一个Don’t care bit(图中打X的位),对该位的说明与相1相同。
尽管每个相写入的数据不同,但其时序都是相同的,并且第九bit都是Don’t care bit。因此可以把每个相的写入编写成一个函数,如下:
u8 SCCB_WR_Byte(u8 dat)//写1个相
{
u8 j,res;
for(j=0;j<8;j++) //循环发送bit7-bit0
{
if(dat&0x80)SCCB_SDA=1;
else SCCB_SDA=0;
dat<<=1;
delay_us(50);
SCCB_SCL=1;
delay_us(50);
SCCB_SCL=0;
}
SCCB_SDA_IN(); //设置SDA为输入
delay_us(50);
SCCB_SCL=1; //将SCL置1,此时如果数据已被从机接收,从机将把SDA置0
delay_us(50);
if(SCCB_READ_SDA)res=1; //SDA置1,说明从机没有成功接收数据
else res=0; //发送成功
SCCB_SCL=0;
SCCB_SDA_OUT(); //设置SDA为输出,为下一个相的输出作准备
return res;
} 根据上面写操作的说明,每向从机的某一个寄存器写一个字节的数据都要完成3个相的数据传输,将这3个相的数据写入过程编写成一个写寄存器函数。
u8 SCCB_WR_Reg(u8 reg,u8 data)
{
u8 res=0;
SCCB_Start(); //启动传输的标志
if(SCCB_WR_Byte(SCCB_ID))res=1; //写入OV7670传感器ID
delay_us(100);
if(SCCB_WR_Byte(reg))res=1; //写寄存器地址
delay_us(100);
if(SCCB_WR_Byte(data))res=1; //写要向寄存器写入的数据
SCCB_Stop(); //结束传输的标志
return res;
} <5>读操作: 根据SCCB协议,要从从机的寄存器读取一个字节的数据,需要完成两次数据传输过程:①包含两个相的写过程(2-Phase Write Transmission Cycle)②包含两个相的读过程(2-Phase Read Transmission Cycle)下面分别介绍: ①两相写传输过程:这个过程包含了两个相,均由主机发送给从机。第一个相指明从机的ID号。第二个相指明将要从从机的哪个寄存器读取数据。这些相各个bit的含义与上面写操作介绍过的含义是一致的。

②两相读传输过程: 上面一个传输过程告诉从机做好准备,主机将要读取数据了。而这一个传输过程则是真正的从从机读取数据。它也包含了两个相。

相1:与上面相1的定义是一致的。但需要注意的是,此时是从从机读取数据,因此bit0应设置为1,可以用SCCB_ID|0x01(SCCB_ID是从机ID号的宏)来得到。 相2:从机向主机发送数据。因此应把主机连接SDA的IO口设置为输入模式。读取八个字节后,为了告诉从机已经成功收到数据,主机应向从机发送一个bit的应答信号(NA)。这个信号的时序定义如下: 这个应答信号需要主机将SDA先拉高,然后在SDA高电平期间,将SCL由原来的低电平变为高电平再变为低电平。实现NAbit的代码如下

void SCCB_No_Ack(void)
{
delay_us(50);
SCCB_SDA=1;
SCCB_SCL=1;
delay_us(50);
SCCB_SCL=0;
delay_us(50);
SCCB_SDA=0;
delay_us(50);
}我们可以把相2中读取bit7-bit0的数据封装成一个函数
u8 SCCB_RD_Byte(void)
{
u8 temp=0,j;
SCCB_SDA_IN(); //设置主机SDA连接的IO口为输入
for(j=8;j>0;j--) //循环读取bit7-bit0
{
delay_us(50);
SCCB_SCL=1;
temp=temp<<1;
if(SCCB_READ_SDA)temp++; //SCCB_READ_SDA是从IO口读到的数据
delay_us(50);
SCCB_SCL=0;
}
SCCB_SDA_OUT(); //将主机连接SDA的IO口设置为输出
return temp;
} 有了以上的两个函数,再借助我们先前编写的写一相数据的u8 SCCB_WR_Byte(u8 dat) 函数,我们就可以编写一个完成整个读操作的函数
u8 SCCB_RD_Reg(u8 reg)
{
u8 val=0;
//对应两相写操作
SCCB_Start(); //启动传输
SCCB_WR_Byte(SCCB_ID); //相1
delay_us(100);
SCCB_WR_Byte(reg); //相2
delay_us(100);
SCCB_Stop(); //结束传输
delay_us(100);
//对应两相读操作
SCCB_Start(); //启动传输
SCCB_WR_Byte(SCCB_ID|0X01); //相1
delay_us(100);
val=SCCB_RD_Byte(); //相2
SCCB_No_Ack(); //读取完8bit数据后的应答
SCCB_Stop(); //结束传输
return val;
}至此我们已经实现了SCCB的读寄存器和写寄存器操作的函数SCCB_RD_Reg和SCCB_WR_Reg。调用这两个函数就可以实现向OV传感器指定寄存器读写数据,从而完成传感器的初始化工作。
sccb就是简化版的i2c总线,sccb不支持连续的,其余的方式都一样。














 6172
6172











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









