






残差结构
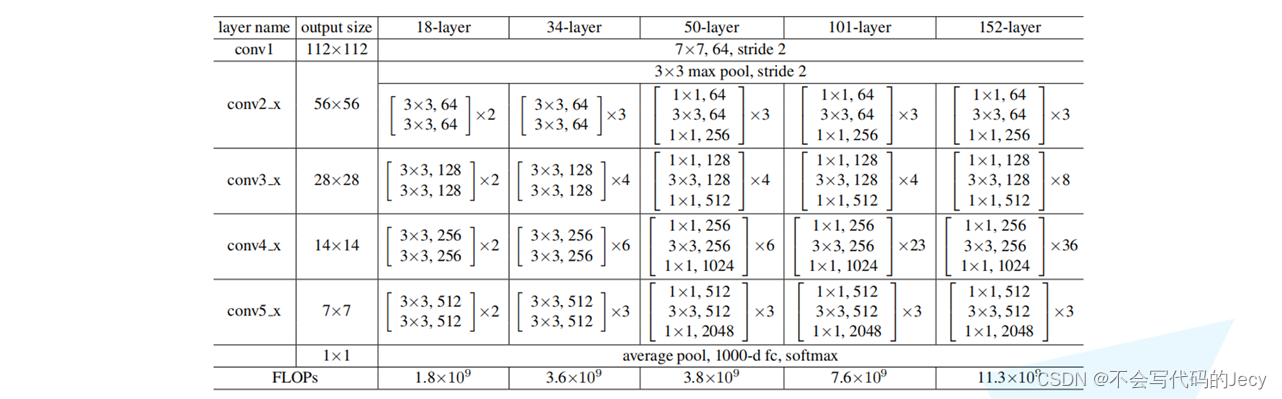
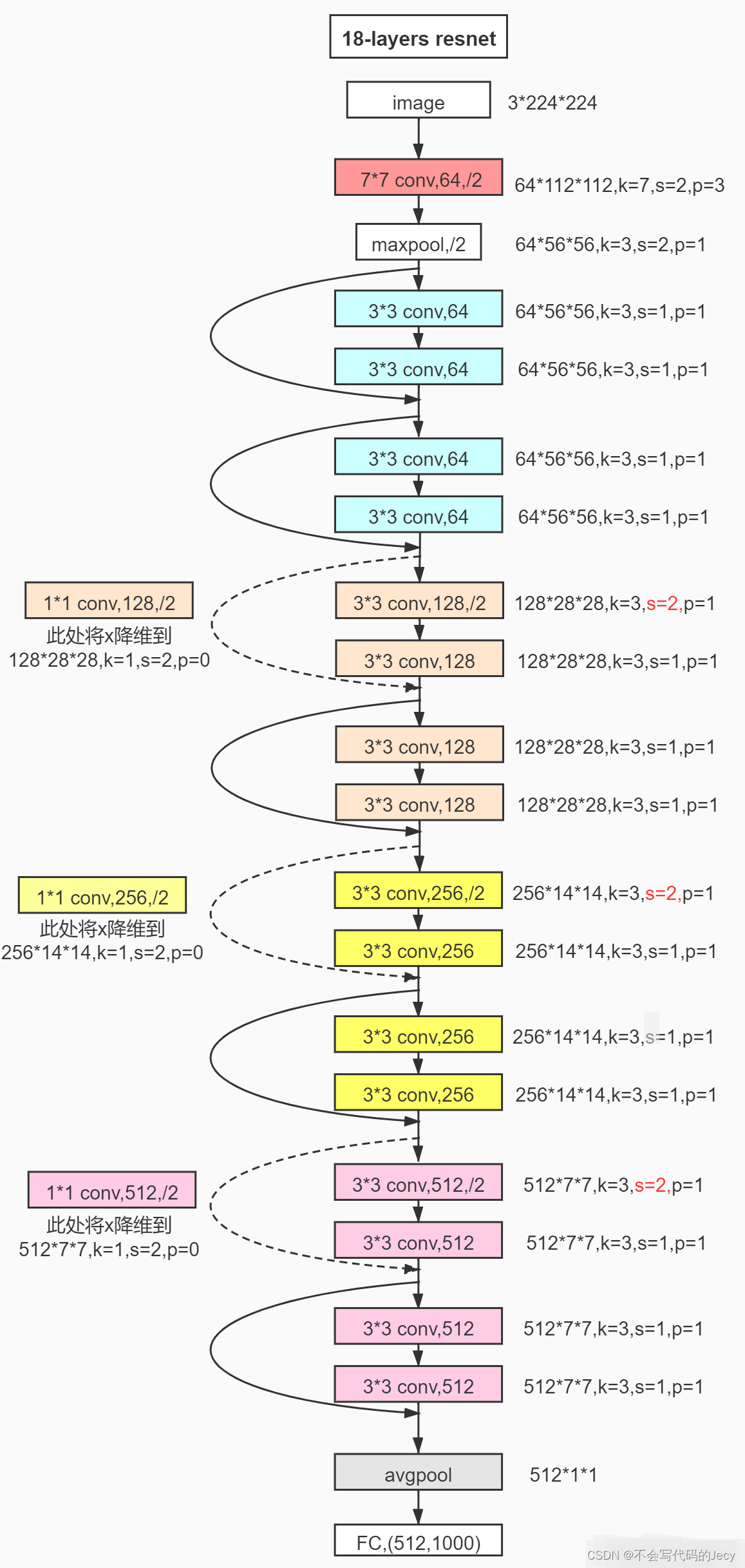
模型
模型代码
import torch
from torch import nn
#18,34层
class BasicBlock(nn.Module):
expansion=1
def __init__(self,in_channel,out_channel,stride=1,downsample=None):
super(BasicBlock,self).__init__()
self.conv1=nn.Conv2d(in_channels=in_channel,out_channels=out_channel,kernel_size=3,stride=stride,padding=1,bias=False)
self.bn1=nn.BatchNorm2d(out_channel)
self.relu=nn.ReLU()
self.conv2=nn.Conv2d(in_channels=out_channel,out_channels=out_channel,kernel_size=3,stride=1,padding=1,bias=False)
self.bn2=nn.BatchNorm2d(out_channel)
self.downsample=downsample
def forward(self,x):
identity =x
if self.downsample is not None:
identity=self.downsample(x)
out=self.conv1(x)
out=self.bn1(out)
out=self.relu(out)
out=self.conv2(out)
out+=identity
out=self.relu(out)
return out
#50层以上
class Bottleneck(nn.Module):
expansion=4
def __init__(self,in_channel,out_channel,stride=1,downsample=None): #out_channel是第一层卷积的输出通道数
super(Bottleneck,self).__init__()
self.conv1=nn.Conv2d(in_channels=in_channel,out_channels=out_channel,kernel_size=1,stride=1,bias=False)
self.bn1=nn.BatchNorm2d(out_channel)
self.conv2=nn.Conv2d(in_channels=out_channel,out_channels=out_channel,kernel_size=3,stride=stride,padding=1,bias=False)
self.bn2=nn.BatchNorm2d(out_channel)
self.conv3=nn.Conv2d(in_channels=out_channel,out_channels=in_channel*self.expansion,kernel_size=1,stride=1,bias=False)
self.relu=nn.ReLU(inplace=True)
self.downsample=downsample
def forward(self,x):
identity=x
if self.downsample is not None:
identity=self.downsample(x)
out = self.conv1(x)
out=self.bn1(out)
out=self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out=self.bn3(out)
out+=identity
out=self.relu(out)
return out
class ResNet(nn.Module):
def __init__(self,block,blocks_num,num_classes=1000,include_top=True):
super(ResNet,self).__init__()
self.include_top=include_top
self.in_channel=64
self.conv1 = nn.Conv2d(3,self.in_channel,kernel_size=7,stride=2,padding=3,bias=False)
self.bn1=nn.BatchNorm2d(self.in_channel)
self.relu=nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3,stride=2,padding=1)
self.layer1=self._make_layer(block,64,blocks_num[0])
self.layer2=self._make_layer(block,128,blocks_num[1],stride=2)
self.layer3=self._make_layer(block,256,blocks_num[2],stride=2)
self.layer4=self._make_layer(block,512,blocks_num[3],stride=2)
if self.include_top:
self.avgpool = nn.AdaptiveAvgPool2d((1,1)) #output size =(1,1)
self.fc =nn.Linear(512*block.expansion,num_classes)
for m in self.modules():
if isinstance(m,nn.Conv2d):
nn.init.kaiming_normal_(m.weight,mode='fan_out',nonlinearity='relu')
def _make_layer(self,block,channel,block_num,stride=1):
downsample=None
if stride !=1 or self.in_channel!=channel * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.in_channel,channel*block.expansion,kernel_size=1,stride=stride,bias=False),
nn.BatchNorm2d(channel*block.expansion)
)
layers=[]
layers.append(block(self.in_channel,channel,downsample=downsample,stride=stride))
self.in_channel = channel*block.expansion
for _ in range(1,block_num):
layers.append(block(self.in_channel,channel))
return nn.Sequential(*layers)
def forward(self,x):
x=self.conv1(x)
x=self.bn1(x)
x=self.relu(x)
x=self.maxpool(x)
x=self.layer1(x)
x=self.layer2(x)
x=self.layer3(x)
x=self.layer4(x)
if self.include_top:
x=self.avgpool(x)
x=torch.flatten(x,1)
x=self.fc(x)
return x
def resnet34(num_classes=1000,include_top=True):
return ResNet(BasicBlock,[3,4,6,3],num_classes=num_classes,include_top=include_top)
def resnet101(num_classes=1000,include_top=True):
return ResNet(Bottleneck,[3,4,23,3],num_classes=num_classes,include_top=include_top)
训练代码(resnet34)
import json
import torch
from torch import nn
import torchvision
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
from ResNetModule import resnet34,resnet101
import torchvision.models.resnet
device=torch.device("cuda:0")
print(device)
data_transform={
"train":torchvision.transforms.Compose([
torchvision.transforms.RandomResizedCrop(224),
torchvision.transforms.RandomHorizontalFlip(),
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize([0.485,0.456,0.406],[0.229,0.224,0.225])
]),
"val":torchvision.transforms.Compose([
torchvision.transforms.Resize(256),
torchvision.transforms.CenterCrop(224),
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize([0.485,0.456,0.406],[0.229,0.224,0.225])
])
}
image_path="D:\pycharm project\噼里啪啦pytroch\\flower_data"
#加载训练数据集
train_dataset = torchvision.datasets.ImageFolder(image_path+"/train",transform=data_transform["train"])
train_num=len(train_dataset)
flower_list= train_dataset.class_to_idx
cla_dict = dict((val,key) for key,val in flower_list.items())
json_str=json.dumps(cla_dict,indent=4)
with open('class_indices.json','w') as json_file:
json_file.write(json_str)
batch_size=16
train_loader=DataLoader(train_dataset,batch_size=batch_size,shuffle=True,num_workers=0,drop_last=False)
#加载验证数据集
validate_dataset = torchvision.datasets.ImageFolder(root=image_path+"/val",transform=data_transform["val"])
val_num=len(validate_dataset)
validate_loader = DataLoader(validate_dataset,batch_size=batch_size,shuffle=True,num_workers=0,drop_last=False)
#实例化模型
net=resnet34()
#加载预训练权重(迁移学习)
model_weight_path="D:\pycharm project\噼里啪啦pytroch\\resnet34-pre.pth"
missing_keys,unexpected_keys = net.load_state_dict(torch.load(model_weight_path),strict=False)
inchannel = net.fc.in_features
net.fc = nn.Linear(inchannel,5)
net.to(device)
loss_function = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(net.parameters(),lr=0.0001)
best_acc = 0.0
#保存模型的路径
save_path ='resnet34.pth'
for epoch in range(3):
#train
net.train()
running_loss=0.0
for data in train_loader:
images,labels=data
optimizer.zero_grad()
outputs=net(images.to(device))
loss=loss_function(outputs,labels.to(device))
loss.backward()
optimizer.step()
running_loss+=loss.item()
#validate
net.eval()
acc = 0.0
with torch.no_grad():
for data_test in validate_loader:
test_images, test_labels = data_test
outputs = net(test_images.to(device))
predict = torch.max(outputs, dim=1)[1]
acc += (predict == test_labels.to(device)).sum().item()
accuracy_test = acc / val_num
if accuracy_test > best_acc:
torch.save(net.state_dict(), save_path)
print("epoch={0}的精确度={1},训练损失={2}".format(epoch + 1, accuracy_test, running_loss))
print("训练完成")
运行结果
















 3146
3146

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









