






用python实现振动传感器的串口通信。
举个测加速度的例子,这是我的振动传感器。
只测一次加速度数据
import serial
import time
# 配置串口参数
serial_port = 'COM8' # 根据你的实际情况修改串口名称
baud_rate = 9600 # 根据你的传感器波特率配置
timeout = 1 # 设置读取超时时间(秒)
try:
# 打开串口
ser = serial.Serial(serial_port, baud_rate, timeout=timeout)
print(f"串口 {serial_port} 已打开,波特率:{baud_rate}")
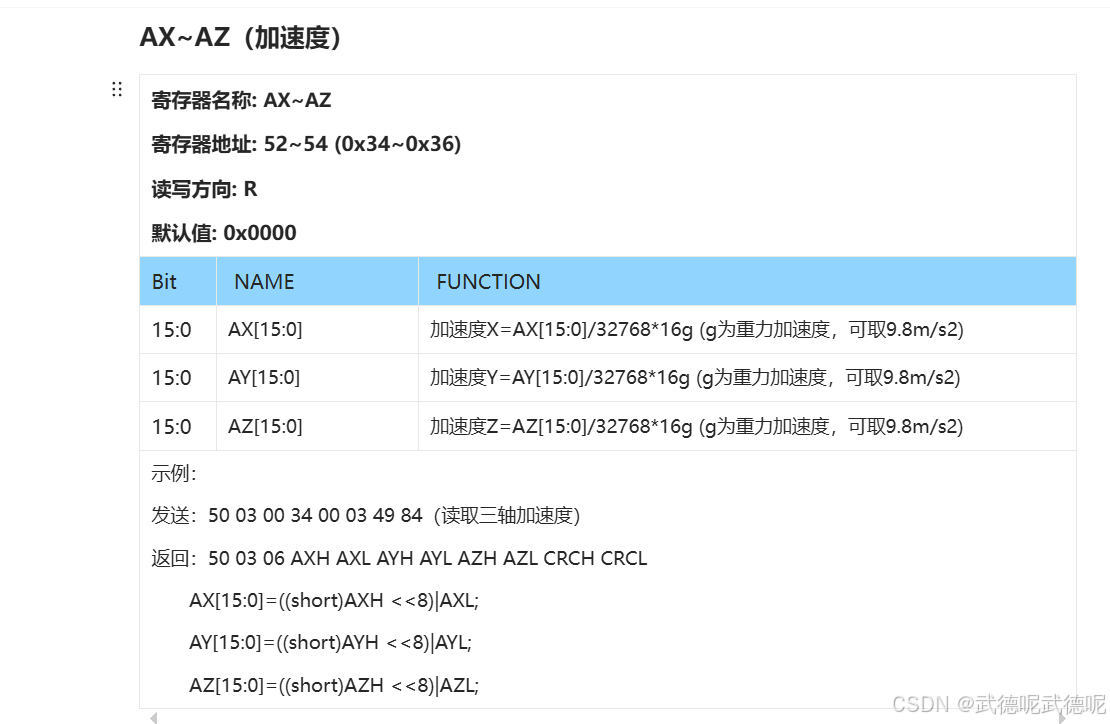
hex_str = bytes.fromhex('50 03 00 34 00 03 49 84') # 你要传给振动传感器的数据
ser.write(hex_str)
time.sleep(0.1) # 等待传感器响应
# 读取串口数据
if ser.in_waiting > 0:
data = ser.read(ser.in_waiting) # 读取所有可用数据
print(f"接收到的数据: {data.hex()}") # 以十六进制显示数据
AXH = data[3] # 第4个十六进制数字符串
AXL = data[4] # 第5个十六进制数字符串
AYH = data[5] # 第6个十六进制数字符串
AYL = data[6] # 第7个十六进制数字符串
AZH = data[7] # 第8个十六进制数字符串
AZL = data[8] # 第9个十六进制数字符串
# 将AXH和AXL组合成一个16位的整数
AX = (AXH << 8) | AXL
AY = (AYH << 8) | AYL
AZ = (AZH << 8) | AZL
# 缩放因子,根据传感器数据手册指定
SCALE_FACTOR = 32768.0
# 重力加速度,单位为m/s^2
G = 9.8 # 通常取9.81,但这里为了简化取9.8
ACCELERATION_X = (AX / SCALE_FACTOR) * 16 * G
ACCELERATION_Y = (AY / SCALE_FACTOR) * 16 * G
ACCELERATION_Z = (AZ / SCALE_FACTOR) * 16 * G
# 输出加速度X的值
print(f"加速度X的值为: {ACCELERATION_X:.2f} m/s^2")
print(f"加速度Y的值为: {ACCELERATION_Y:.2f} m/s^2")
print(f"加速度Z的值为: {ACCELERATION_Z:.2f} m/s^2")
# 延迟以避免过于频繁地读取
time.sleep(0.1)
except serial.SerialException as e:
print(f"串口错误: {e}")
except KeyboardInterrupt:
print("程序被用户中断")
finally:
if 'ser' in locals() and ser.is_open:
ser.close()
print("串口已关闭")
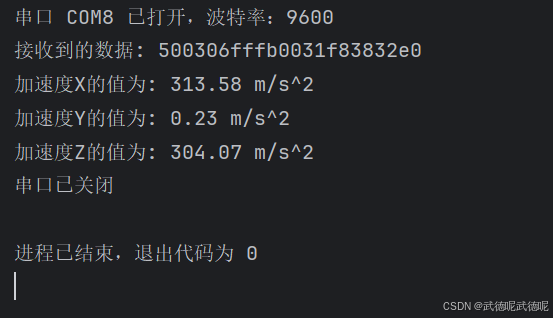
运行结果
循环测加速度数据
import serial
import time
# 配置串口参数
serial_port = 'COM8' # 根据你的实际情况修改串口名称
baud_rate = 9600 # 根据你的传感器波特率配置
timeout = 1 # 设置读取超时时间(秒)
try:
# 打开串口
ser = serial.Serial(serial_port, baud_rate, timeout=timeout)
print(f"串口 {serial_port} 已打开,波特率:{baud_rate}")
while True:
hex_str = bytes.fromhex('50 03 00 34 00 03 49 84') # 你要传给振动传感器的数据
ser.write(hex_str)
time.sleep(0.1) # 等待传感器响应
# 读取串口数据
if ser.in_waiting > 0:
data = ser.read(ser.in_waiting) # 读取所有可用数据
print(f"接收到的数据: {data.hex()}") # 以十六进制显示数据
AXH = data[3] # 第4个十六进制数字符串
AXL = data[4] # 第5个十六进制数字符串
AYH = data[5] # 第6个十六进制数字符串
AYL = data[6] # 第7个十六进制数字符串
AZH = data[7] # 第8个十六进制数字符串
AZL = data[8] # 第9个十六进制数字符串
# 将AXH和AXL组合成一个16位的整数
AX = (AXH << 8) | AXL
AY = (AYH << 8) | AYL
AZ = (AZH << 8) | AZL
# 缩放因子,根据传感器数据手册指定
SCALE_FACTOR = 32768.0
# 重力加速度,单位为m/s^2
G = 9.8 # 通常取9.81,但这里为了简化取9.8
ACCELERATION_X = (AX / SCALE_FACTOR) * 16 * G
ACCELERATION_Y = (AY / SCALE_FACTOR) * 16 * G
ACCELERATION_Z = (AZ / SCALE_FACTOR) * 16 * G
# 输出加速度X的值
print(f"加速度X的值为: {ACCELERATION_X:.2f} m/s^2")
print(f"加速度Y的值为: {ACCELERATION_Y:.2f} m/s^2")
print(f"加速度Z的值为: {ACCELERATION_Z:.2f} m/s^2")
# 延迟以避免过于频繁地读取
time.sleep(1)
except serial.SerialException as e:
print(f"串口错误: {e}")
except KeyboardInterrupt:
print("程序被用户中断")
finally:
if 'ser' in locals() and ser.is_open:
ser.close()
print("串口已关闭")
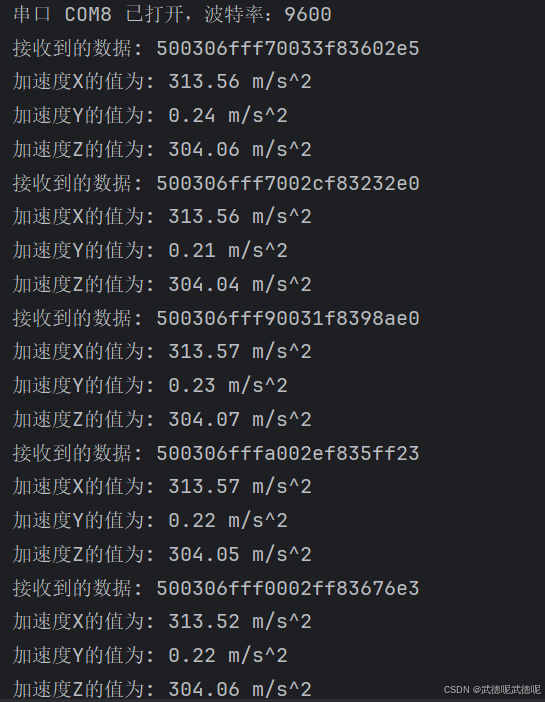
运行结果
循环测多种数据
import serial
import time
# 加速度 振动速度 振动位移
# 配置串口参数
serial_port = 'COM8' # 根据你的实际情况修改串口名称
baud_rate = 9600 # 根据你的传感器波特率配置
timeout = 1 # 设置读取超时时间(秒)
def func1(): # 加速度
hex_str = bytes.fromhex('50 03 00 34 00 03 49 84') # 你要传给振动传感器的数据
ser.write(hex_str)
time.sleep(0.1) # 等待传感器响应
# 读取串口数据
if ser.in_waiting > 0:
data = ser.read(ser.in_waiting) # 读取所有可用数据
print(f"接收到的数据: {data.hex()}") # 以十六进制显示数据
AXH = data[3] # 第4个十六进制数字符串
AXL = data[4] # 第5个十六进制数字符串
AYH = data[5] # 第6个十六进制数字符串
AYL = data[6] # 第7个十六进制数字符串
AZH = data[7] # 第8个十六进制数字符串
AZL = data[8] # 第9个十六进制数字符串
# 将AXH和AXL组合成一个16位的整数
AX = (AXH << 8) | AXL
AY = (AYH << 8) | AYL
AZ = (AZH << 8) | AZL
# 缩放因子,根据传感器数据手册指定
SCALE_FACTOR = 32768.0
# 重力加速度,单位为m/s^2
G = 9.8 # 通常取9.81,但这里为了简化取9.8
ACCELERATION_X = (AX / SCALE_FACTOR) * 16 * G
ACCELERATION_Y = (AY / SCALE_FACTOR) * 16 * G
ACCELERATION_Z = (AZ / SCALE_FACTOR) * 16 * G
# 输出加速度X的值
print(f"加速度X的值为: {ACCELERATION_X:.2f} m/s^2")
print(f"加速度Y的值为: {ACCELERATION_Y:.2f} m/s^2")
print(f"加速度Z的值为: {ACCELERATION_Z:.2f} m/s^2")
# 延迟以避免过于频繁地读取
time.sleep(0.1)
def func2(): # 振动速度
hex_str = bytes.fromhex('50 03 00 3A 00 03 28 47') # 你要传给振动传感器的数据
ser.write(hex_str)
time.sleep(0.1) # 等待传感器响应
# 读取串口数据
if ser.in_waiting > 0:
data = ser.read(ser.in_waiting) # 读取所有可用数据
print(f"接收到的数据: {data.hex()}") # 以十六进制显示数据
VXH = data[3] # 第4个十六进制数字符串
VXL = data[4] # 第5个十六进制数字符串
VYH = data[5] # 第6个十六进制数字符串
VYL = data[6] # 第7个十六进制数字符串
VZH = data[7] # 第8个十六进制数字符串
VZL = data[8] # 第9个十六进制数字符串
# 将AXH和AXL组合成一个16位的整数
VX = (VXH << 8) | VXL
VY = (VYH << 8) | VYL
VZ = (VZH << 8) | VZL
# 输出加速度X的值
print(f"振动速度VX的值为: {VX:.2f} mm/S")
print(f"振动速度VY的值为: {VY:.2f} mm/S")
print(f"振动速度VZ的值为: {VZ:.2f} mm/S")
# 延迟以避免过于频繁地读取
time.sleep(0.1)
def func3(): # 振动位移
hex_str = bytes.fromhex('50 03 00 41 00 03 58 5E') # 你要传给振动传感器的数据
ser.write(hex_str)
time.sleep(0.1) # 等待传感器响应
# 读取串口数据
if ser.in_waiting > 0:
data = ser.read(ser.in_waiting) # 读取所有可用数据
print(f"接收到的数据: {data.hex()}") # 以十六进制显示数据
DXH = data[3] # 第4个十六进制数字符串
DXL = data[4] # 第5个十六进制数字符串
DYH = data[5] # 第6个十六进制数字符串
DYL = data[6] # 第7个十六进制数字符串
DZH = data[7] # 第8个十六进制数字符串
DZL = data[8] # 第9个十六进制数字符串
# 将AXH和AXL组合成一个16位的整数
DX = (DXH << 8) | DXL
DY = (DYH << 8) | DYL
DZ = (DZH << 8) | DZL
# 输出加速度X的值
print(f"振动位移DX的值为: {DX:.2f} um")
print(f"振动位移DY的值为: {DY:.2f} um")
print(f"振动位移DZ的值为: {DZ:.2f} um")
# 延迟以避免过于频繁地读取
time.sleep(0.1)
try:
# 打开串口
ser = serial.Serial(serial_port, baud_rate, timeout=timeout)
print(f"串口 {serial_port} 已打开,波特率:{baud_rate}")
while True:
func1()
func2()
func3()
print("---------------------------------------------------------------")
time.sleep(0.5)
except serial.SerialException as e:
print(f"串口错误: {e}")
except KeyboardInterrupt:
print("程序被用户中断")
finally:
if 'ser' in locals() and ser.is_open:
ser.close()
print("串口已关闭")
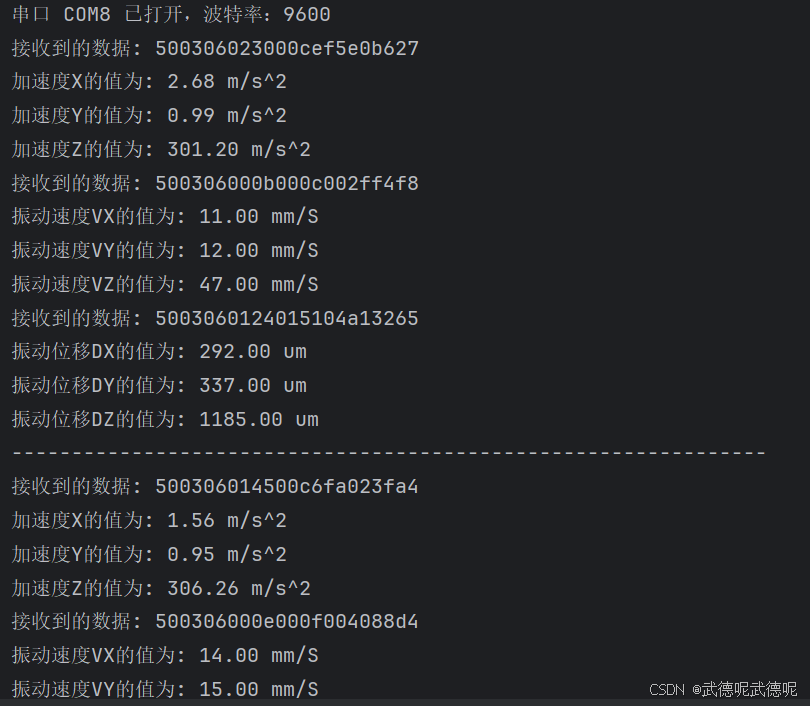
运行结果

















 1037
1037

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









