






 本文介绍两轮自平衡车的工作原理,通过倒立摆模型解释其如何保持动态平衡,并给出系统力学模型、状态空间模型及传递函数阵模型。
本文介绍两轮自平衡车的工作原理,通过倒立摆模型解释其如何保持动态平衡,并给出系统力学模型、状态空间模型及传递函数阵模型。
- 两轮自平衡车系统工作原理
两轮自平衡车的平衡原理来自于倒立摆模型,由于两轮自平衡车的双轮平行布置在车体的左右两端,且载人时重心在双轮轴心正上方,所以它相当于一个倒立摆,是不稳定体,车体总是要向前或向后倾倒。当检测到车体向前倾斜时,内部电机加速旋转产生一个向前的加速度,这个加速度使得在双轮轴心上方的重心向后摆动,这就抵消了车体的向前倾斜,使车体的重心回到两轮中心轴的正上方,从而在竖直方向保持平衡。这一平衡是动态的,为保持车体竖直不倒,必须不断地驱动电机前进或后退,来克服重心偏移现象,保持车体平衡。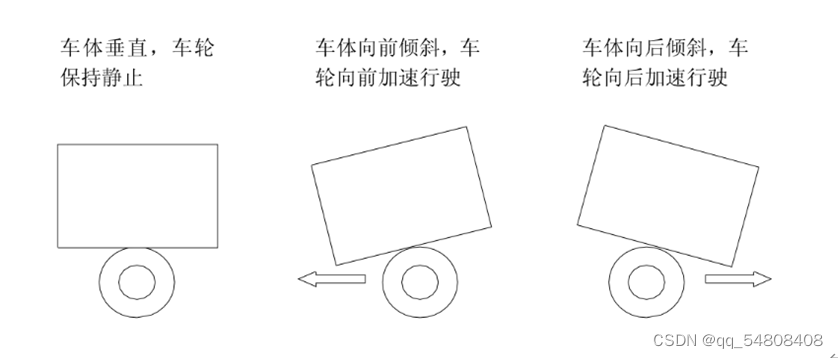
图1 平衡车系统平衡原理图
- 平衡车系统力学模型
忽略空气阻力后,可以将平衡车抽象成小车和均匀质杆组成的系统,如下图所示:
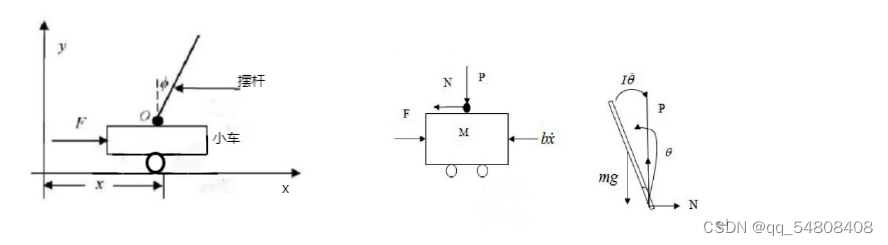
图2 自平衡车系统简图 图3 小车及摆杆受力分析
其中,M——小车质量 m——摆杆质量 b——小车的摩擦系数
l——摆杆的转动轴心到质心的长度 I——摆杆惯量
F——小车受力(内部电机提供) θ——摆杆与垂直向下方向的夹角
x——小车位移 φ——摆杆与垂直向上方向的夹角
1.分析小车在水平方向所受合力可得:
 2.分析摆杆在水平方向所受合力可得:
2.分析摆杆在水平方向所受合力可得:
 3.把(2)式代入(1)式可得系统的第一个运动方程:
3.把(2)式代入(1)式可得系统的第一个运动方程:
 4.对摆杆垂直方向受力分析可得:
4.对摆杆垂直方向受力分析可得:

5.把(4)式代入(3)式可得系统的第二个运动方程:
 3.平衡车系统状态空间模型
3.平衡车系统状态空间模型
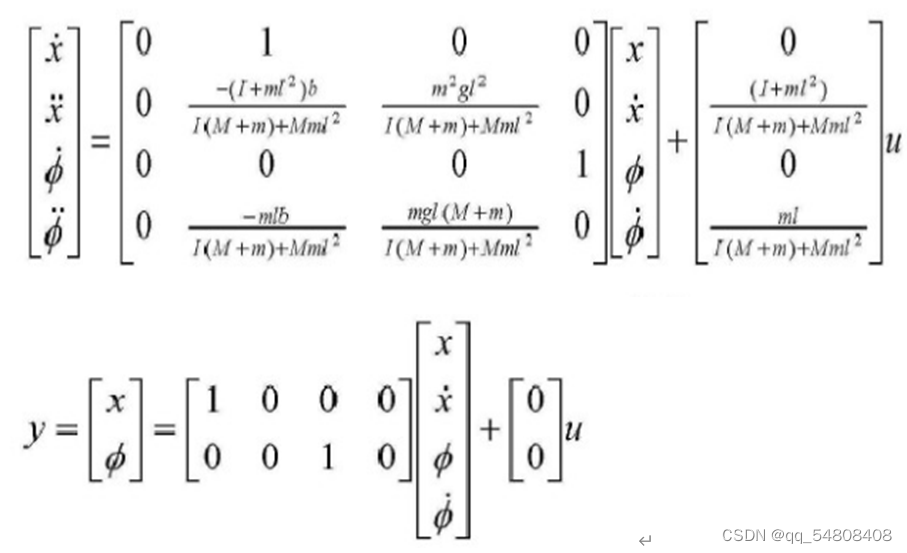
- 被控对象的输入力F用u表示,线性化后得到运动方程:
 2.整理后得到系统状态空间表达式:
2.整理后得到系统状态空间表达式:
 3.各物理量取以下数值,从而得到具体的状态空间模型
3.各物理量取以下数值,从而得到具体的状态空间模型
表1 各物理量取值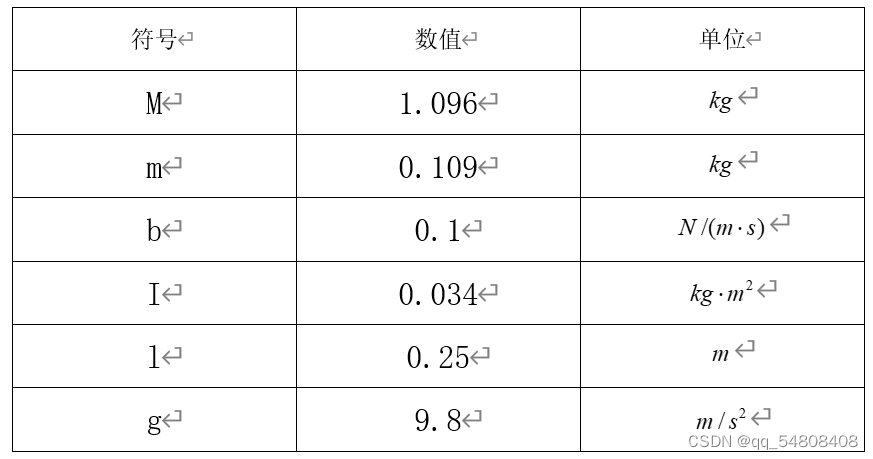
状态变量: ;输入变量:
;输入变量: ; 输出变量:
; 输出变量:
则状态方程和输出方程: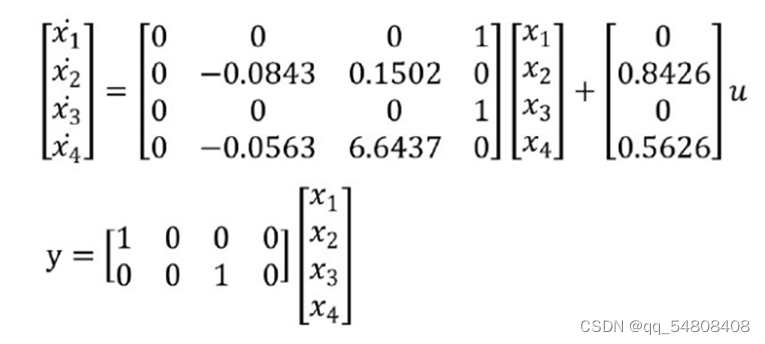
4.平衡车系统传递函数阵模型
由MATLAB将状态空间模型转换为传递函数模型,得到
(1)y与x1(x)之间的传递函数为:
(2)y与x3(φ)之间的传递函数为: 
MATLAB程序附录:
clear;
clc;
syms I m M l b g x fai;
M=1.096;m=0.109;b=0.1;I=0.034;
l=0.25;g=9.8;
t=I*(M+m)+M*m*l^2;
A=[0,1,0,0;
0,-(I+m*l^2)*b/t,m^2*g*l^2,0;
0,0,0,1;
0,-m*l*b/t,m*g*l*(M+m)/t,0;];
B=[0;(I+m*l^2)/t;0;m*l/t;];
C=[1,0,0,0;0,0,1,0;];
D=[0;0];
G_ss=ss(A,B,C,D);%状态空间模型
G_tf=tf(G_ss); %传递函数阵模型

















 5380
5380

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









