






目录
4.薄透镜近似(Thin Lens Approximation)
1.相机
图像可以是合成的,也可以是捕捉得到的;
快门:可以控制光在一个极短的时间内进入相机
传感器:在曝光过程中,在传感器每个点上记录其接受到的irradiance
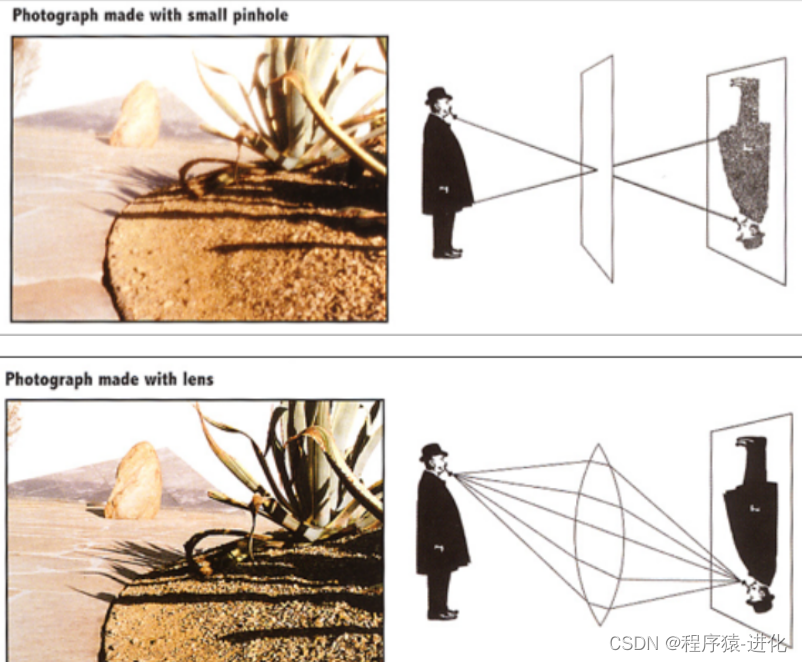
针孔相机和透镜相机的区别
针孔相机:利用小孔成像的原理,只有射向小孔的一条光线能通过,最终打在传感器上,光线追踪利用的是针孔摄像机模型;针孔相机拍到的图像没有深度可言,比较锐利,没有虚化的部分;
透镜相机:较为常用,用一个凸透镜,它反射出去的光可以有多条以不同的折射角度射到成像平面上,往往更加清晰;
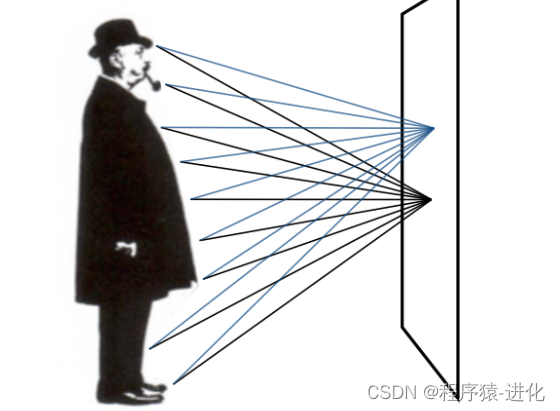
如果没有透镜和小孔,直接用传感器记录光线,传感器并不区分来自哪个方向的光线,传感器上一个点记录了所有方向的光线,最终成像是一团浆糊;
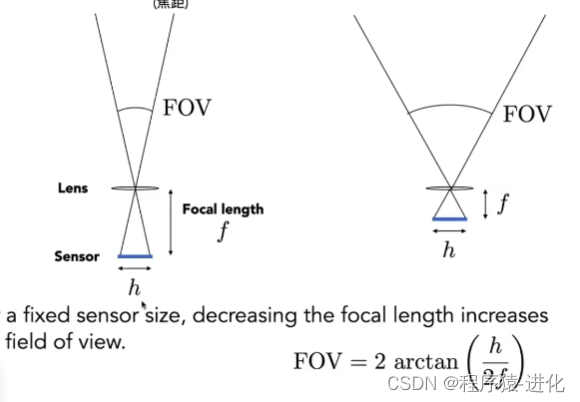
2.视场(Field of Vied)(FOV)
即相机能看到范围;
传感器的高度h,和焦距 f,视场与f成反比,与h成正比,可以认为传感器越大、焦距越长,则相机越好;
通常会固定传感器大小,用焦距衡量视场,通常描述焦距都会换算到传感器35mm所对应的焦距长度;例如17mm -104°(广角), 50mm - 47°(普通);
3.曝光(Exposure)
曝光度公式:H = T x E
H:曝光
T:曝光时间,快门控制多长时间光可以进入
E:辐照度,感光器的单位面积上接收到的辐射通量总和,通过光圈大小和焦距控制
Aperture size(光圈大小):通过开关光圈改变f-number/stop(光圈级数),写作FN 或 F/N,其中N就是F数,可以简单形象的理解为光圈直径的倒数。实际上F-Stop的数值为 焦距与光圈直径之比,即f/D;
大光圈会模糊,浅景深,小光圈更清晰;
Shutter speed(快门):改变传感器每个像素吸收光的时间,快门打开时间长,拍摄运动的物体就会拖影,因为物体在你光圈打开这段时间内,一直在运动,而相机把每一刻的信息都记录下来;
ISO gain(感光度):后期处理,把结果乘上一个数,但同时将噪声放大;
下图光圈越大越清晰,快门开放时间越短越清晰,感光度高噪声大;
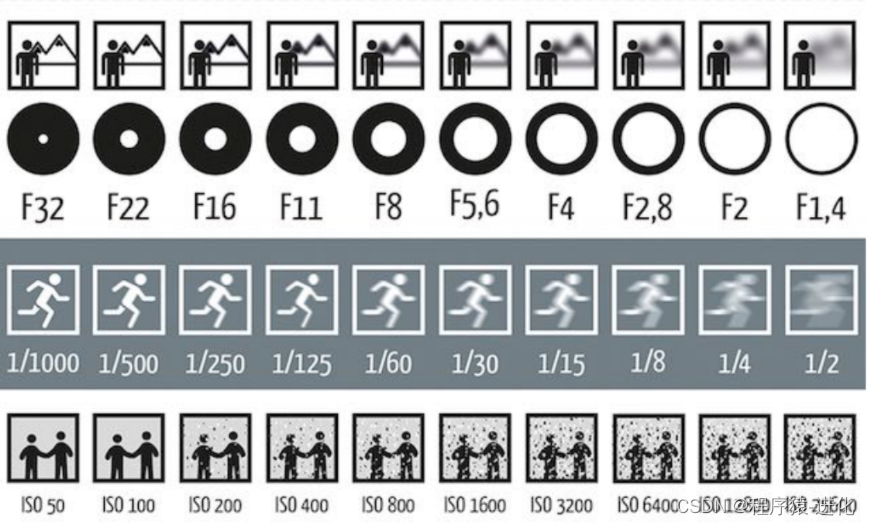
F-stop增加一倍可以让Shutter speed增加四倍进行补偿;

4.薄透镜近似(Thin Lens Approximation)
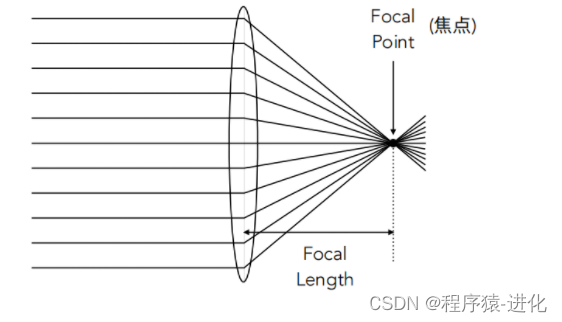
理想的薄透镜:任意平行光穿过透镜会聚焦在焦点处;任意光通过焦点射向透镜,会变为互相平行的光;假设薄透镜的焦距可以任意改变;
真实的平面凸透镜并不会使光聚集于一点
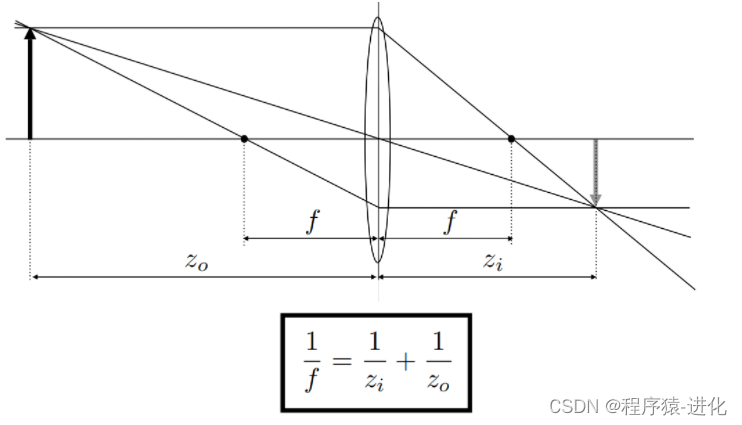
薄透镜公式
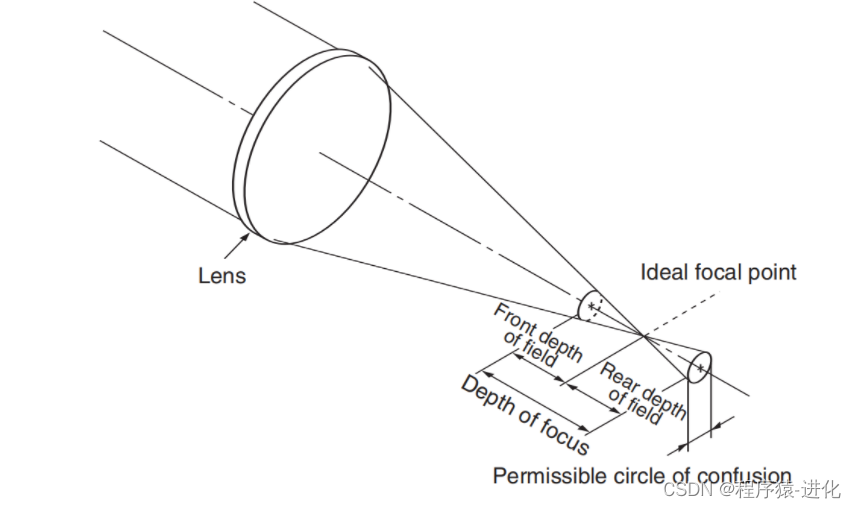
5.Circle of Confusion(CoC)
CoC的尺寸就是,一个点成像后变成一个圈,这个圈的尺寸;
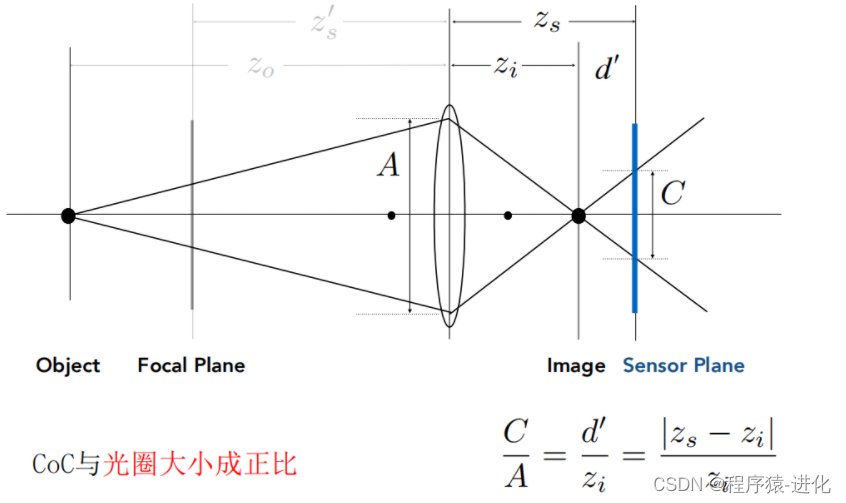
位于焦平面成像清晰,不位于焦平面则成像模糊;
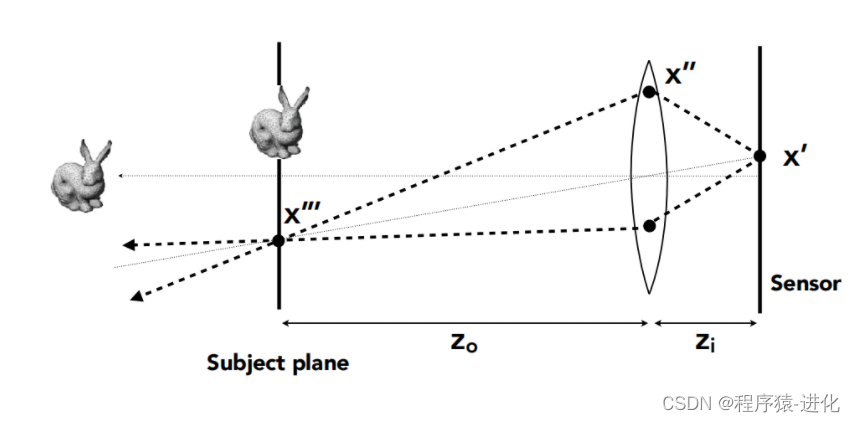
6.渲染中模拟透镜
一般光线追踪使用的是针孔摄像机模型,但是如果想做出真实相机中的模糊效果,需要模拟薄透镜相机;
光追每次仅一条trace,在透镜平面随机采样一个点x ′′ ,以x''为光线起点,多次随机采样,最后基本上会覆盖到整个棱镜的各个部分;计算最近交点,最终得到radiance,记录到x ′;
7.景深(Depth of Field)
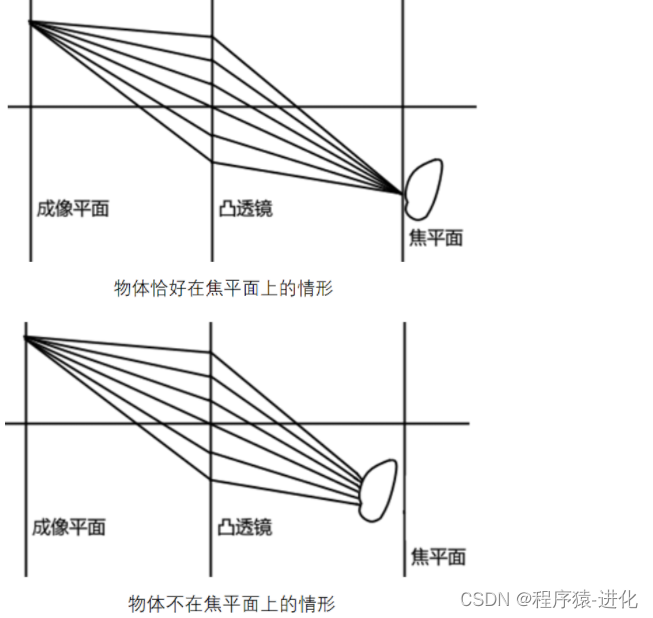
圈的大小会影响模糊的范围,只有在Focal Plane上的物体可以清晰成像;
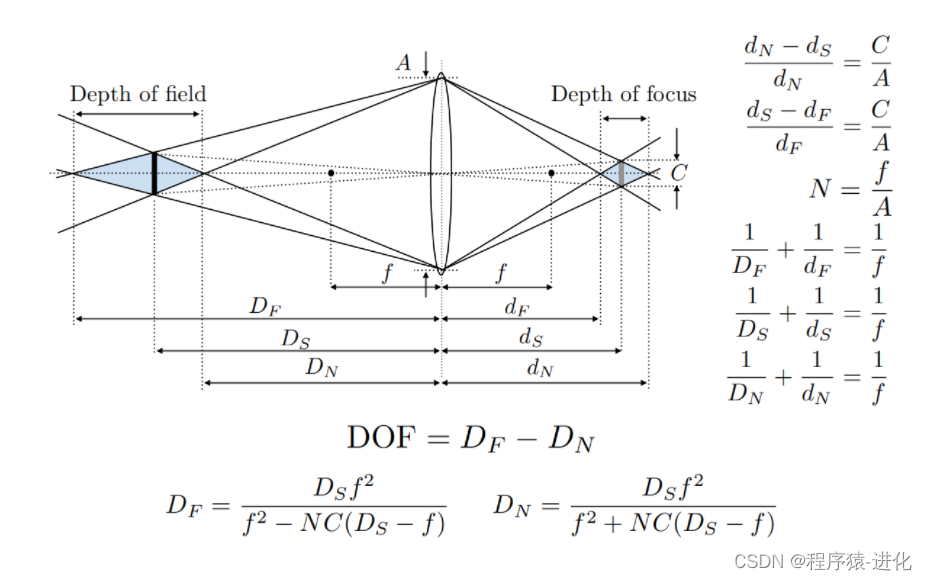
CoC和景深的关系
景深是场景中的一段深度;在focal point 附近的一段范围内的CoC并不大(比一个像素小 或者差不多大),如果从场景中来的光经过理想化的透镜后落在这一段内, 可以认为场景中的这段深度成像是清晰的,其他深度则是模糊的;
计算景深范围
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









