






第一章 ROS概述与环境搭建
1.1 ROS简介
机器人体系是相当庞大的,其复杂度之高,以至于没有任何个人、组织甚至公司能够独立完成系统性的机器人研发工作。
一种更合适的策略是:*让机器人研发者专注于自己擅长的领域,其他模块则直接复用相关领域更专业研发团队的实现,当然自身的研究也可以被他人继续复用。*这种基于"复用"的分工协作,遵循了不重复发明轮子的原则,显然是可以大大提高机器人的研发效率的,尤其是随着机器人硬件越来越丰富,软件库越来越庞大,这种复用性和模块化开发需求也愈发强烈。
在此大背景下,于 2007 年,一家名为 **柳树车库(Willow Garage)**的机器人公司发布了 ROS(机器人操作系统),ROS是一套机器人通用软件框架,可以提升功能模块的复用性,并且随着该系统的不断迭代与完善,如今 ROS 已经成为机器人领域的事实标准。
1.2 ROS程序实现流程
- 先创建一个工作空间;
- 再创建一个功能包;
- 编辑源文件;
- 编辑配置文件
- 编译并执行。
1.3 C语言实现
1.3.1创建工作空间并初始化
mkdir -p 自定义空间名称/src
cd 自定义空间名称
catkin_make
1.3.2进入 src 创建 ros 包并添加依赖
cd src
catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs
上述命令,会在工作空间下生成一个功能包,该功能包依赖于 roscpp、rospy 与 std_msgs,其中roscpp是使用C++实现的库,而rospy则是使用python实现的库,std_msgs是标准消息库,创建ROS功能包时,一般都会依赖这三个库实现。
1.3.3C++编写程序
- 1.包含ros的头文件
#include "ros/ros.h"
- 2.写main函数
- 3.初始化ros节点
- 4.输出日志
#include "ros/ros.h"
int main(int argc, char *argv[])
{
//执行 ros 节点初始化
ros::init(argc,argv,"hello");
//创建 ros 节点句柄(非必须)
ros::NodeHandle n;
//控制台输出 hello world
ROS_INFO("hello world!");
return 0;
}
1.3.4.进入 ros 包的 src 目录编辑源文件
cd 自定义的包
C++源码实现(文件名自定义)
#include "ros/ros.h"
int main(int argc, char *argv[])
{
//执行 ros 节点初始化
ros::init(argc,argv,"hello");
//创建 ros 节点句柄(非必须)
ros::NodeHandle n;
//控制台输出 hello world
ROS_INFO("hello world!");
return 0;
}
1.3.5编辑 ros 包下的 Cmakelist.txt文件
add_executable(步骤3的project
src/步骤3的源文件名.cpp
)
target_link_libraries(步骤3的project
${catkin_LIBRARIES}
)
project是给源文件映射的一个名称
1.3.6进入工作空间目录并编译
cd 自定义空间名称
catkin_make
生成 build devel …
1.3.7执行
先启动命令行1:
roscore
再启动命令行2:
cd 工作空间
source ./devel/setup.bash //设置环境变量
rosrun 包名 C++节点
命令行输出: HelloWorld!
PS:source ~/工作空间/devel/setup.bash可以添加进.bashrc文件,使用上更方便
添加方式1: 直接使用 gedit 或 vi 编辑 .bashrc 文件,最后添加该内容
添加方式2:echo "source ~/工作空间/devel/setup.bash" >> ~/.bashrc
source .bashrc
1.4 Python实现
1.进入 ros 包添加 scripts 目录并编辑 python 文件
cd ros包
mkdir scripts
新建 python 文件: (文件名自定义)
xxxxxxxxxx12 1#! /usr/bin/env python
##指定解释器
#1.导包
#2.编写主入口
#3.初始化ROS节点
#4.输出日志
#! /usr/bin/env python
"""
Python 版 HelloWorld
"""
import rospy
if __name__ == "__main__":
rospy.init_node("Hello")
rospy.loginfo("Hello World!!!!")
2.为 python 文件添加可执行权限
chmod +x 自定义文件名.py
3.编辑 ros 包下的 CamkeList.txt 文件
catkin_install_python(PROGRAMS scripts/自定义文件名.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
4.进入工作空间目录并编译
cd 自定义空间名称
catkin_make
5.进入工作空间目录并执行
先启动命令行1:
roscore
再启动命令行2:
cd 工作空间
source ./devel/setup.bash //刷新环境变量
rosrun 包名 自定义文件名.py
输出结果:Hello World!!!!
1.3 ROS集成开发环境搭建
1.3.1 终端安装
sudo apt install terminator
1.3.2 添加到收藏夹
显示应用程序 —> 搜索 terminator —> 右击 选择 添加到收藏夹
1.3.3 Terminator 常用快捷键
第一部份:关于在同一个标签内的操作
Alt+Up //移动到上面的终端
Alt+Down //移动到下面的终端
Alt+Left //移动到左边的终端
Alt+Right //移动到右边的终端
Ctrl+Shift+O //水平分割终端
Ctrl+Shift+E //垂直分割终端
Ctrl+Shift+Right //在垂直分割的终端中将分割条向右移动
Ctrl+Shift+Left //在垂直分割的终端中将分割条向左移动
Ctrl+Shift+Up //在水平分割的终端中将分割条向上移动
Ctrl+Shift+Down //在水平分割的终端中将分割条向下移动
Ctrl+Shift+S //隐藏/显示滚动条
Ctrl+Shift+F //搜索
Ctrl+Shift+C //复制选中的内容到剪贴板
Ctrl+Shift+V //粘贴剪贴板的内容到此处
Ctrl+Shift+W //关闭当前终端
Ctrl+Shift+Q //退出当前窗口,当前窗口的所有终端都将被关闭
Ctrl+Shift+X //最大化显示当前终端
Ctrl+Shift+Z //最大化显示当前终端并使字体放大
Ctrl+Shift+N or Ctrl+Tab //移动到下一个终端
Ctrl+Shift+P or Ctrl+Shift+Tab //Crtl+Shift+Tab 移动到之前的一个终端
第二部份:有关各个标签之间的操作
F11 //全屏开关
Ctrl+Shift+T //打开一个新的标签
Ctrl+PageDown //移动到下一个标签
Ctrl+PageUp //移动到上一个标签
Ctrl+Shift+PageDown //将当前标签与其后一个标签交换位置
Ctrl+Shift+PageUp //将当前标签与其前一个标签交换位置
Ctrl+Plus (+) //增大字体
Ctrl+Minus (-) //减小字体
Ctrl+Zero (0) //恢复字体到原始大小
Ctrl+Shift+R //重置终端状态
Ctrl+Shift+G //重置终端状态并clear屏幕
Super+g //绑定所有的终端,以便向一个输入能够输入到所有的终端
Super+Shift+G //解除绑定
Super+t //绑定当前标签的所有终端,向一个终端输入的内容会自动输入到其他终端
Super+Shift+T //解除绑定
Ctrl+Shift+I //打开一个窗口,新窗口与原来的窗口使用同一个进程
Super+i //打开一个新窗口,新窗口与原来的窗口使用不同的进程
1.3.4 安装VScode
VSCode 全称 Visual Studio Code,是微软出的一款轻量级代码编辑器,免费、开源而且功能强大。它支持几乎所有主流的程序语言的语法高亮、智能代码补全、自定义热键、括号匹配、代码片段、代码对比 Diff、GIT 等特性,支持插件扩展,并针对网页开发和云端应用开发做了优化。软件跨平台支持 Win、Mac 以及 Linux。
1.下载
vscode 下载:https://code.visualstudio.com/docs?start=true
历史版本下载链接: https://code.visualstudio.com/updates
2.vscode 安装与卸载
2.1 安装
**方式1:**双击安装即可(或右击选择安装)
方式2:sudo dpkg -i xxxx.deb
2.2 卸载
sudo dpkg --purge code
4.vscode 使用_基本配置
4.1 创建 ROS 工作空间
mkdir -p xxx_ws/src(必须得有 src)
cd xxx_ws
catkin_make
4.2 启动 vscode
进入 xxx_ws 启动 vscode
cd xxx_ws
code .
4.3 vscode 中编译 ros
快捷键 ctrl + shift + B 调用编译,选择:catkin_make:build
可以点击配置设置为默认,修改.vscode/tasks.json 文件
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}
4.4 创建 ROS 功能包
选定 src 右击 —> create catkin package
设置包名 添加依赖
4.5 C++ 实现
在功能包的 src 下新建 cpp 文件
/*
控制台输出 HelloVSCode !!!
*/
#include "ros/ros.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//执行节点初始化
ros::init(argc,argv,"HelloVSCode");
//输出日志
ROS_INFO("Hello VSCode!!!哈哈哈哈哈哈哈哈哈哈");
return 0;
}
PS1: 如果没有代码提示
修改 .vscode/c_cpp_properties.json
设置 “cppStandard”: “c++17”
PS2: main 函数的参数不可以被 const 修饰
PS3: 当ROS__INFO 终端输出有中文时,会出现乱码
INFO: ???
解决办法:在函数开头加入下面代码的任意一句
setlocale(LC_CTYPE, "zh_CN.utf8");
setlocale(LC_ALL, "");
4.6 python 实现
在 功能包 下新建 scripts 文件夹,添加 python 文件,并添加可执行权限
#! /usr/bin/env python
"""
Python 版本的 HelloVScode,执行在控制台输出 HelloVScode
实现:
1.导包
2.初始化 ROS 节点
3.日志输出 HelloWorld
"""
import rospy # 1.导包
if __name__ == "__main__":
rospy.init_node("Hello_Vscode_p") # 2.初始化 ROS 节点
rospy.loginfo("Hello VScode, 我是 Python ....") #3.日志输出 HelloWorld
4.7 配置 CMakeLists.txt
C++ 配置:
add_executable(节点名称
src/C++源文件名.cpp
)
target_link_libraries(节点名称
${catkin_LIBRARIES}
)
Python 配置:
catkin_install_python(PROGRAMS scripts/自定义文件名.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
4.8 编译执行
编译: ctrl + shift + B
执行: 和之前一致,只是可以在 VScode 中添加终端,首先执行:source ./devel/setup.bash
如果不编译直接执行 python 文件,会抛出异常。
1.第一行解释器声明,可以使用绝对路径定位到 python3 的安装路径 #! /usr/bin/python3,但是不建议
2.建议使用 #!/usr/bin/env python 但是会抛出异常 : /usr/bin/env: “python”: 没有那个文件或目录
3.解决1: #!/usr/bin/env python3 直接使用 python3 但存在问题: 不兼容之前的 ROS 相关 python 实现
4.解决2: 创建一个链接符号到 python 命令:sudo ln -s /usr/bin/python3 /usr/bin/python
1.3.5 launch文件演示
1.需求
一个程序中可能需要启动多个节点,比如:ROS 内置的小乌龟案例,如果要控制乌龟运动,要启动多个窗口,分别启动 roscore、乌龟界面节点、键盘控制节点。如果每次都调用 rosrun 逐一启动,显然效率低下,如何优化?
官方给出的优化策略是使用 launch 文件,可以一次性启动多个 ROS 节点。
2.实现
-
选定功能包右击 —> 添加 launch 文件夹
-
选定 launch 文件夹右击 —> 添加 launch 文件
-
编辑 launch 文件内容
<launch> <node pkg="helloworld" type="demo_hello" name="hello" output="screen" /> <node pkg="turtlesim" type="turtlesim_node" name="t1"/> <node pkg="turtlesim" type="turtle_teleop_key" name="key1" /> </launch>- node —> 包含的某个节点
- pkg -----> 功能包
- type ----> 被运行的节点文件
- name --> 为节点命名
- output-> 设置日志的输出目标
-
运行 launch 文件
roslaunch 包名 launch文件名 -
运行结果: 一次性启动了多个节点
第 2 章 ROS通信机制
机器人是一种高度复杂的系统性实现,在机器人上可能集成各种传感器(雷达、摄像头、GPS…)以及运动控制实现,为了解耦合,在ROS中每一个功能点都是一个单独的进程,每一个进程都是独立运行的。更确切的讲,ROS是进程(也称为Nodes**)的分布式框架。** 因为这些进程甚至还可分布于不同主机,不同主机协同工作,从而分散计算压力。不过随之也有一个问题: 不同的进程是如何通信的?也即不同进程间如何实现数据交换的?在此我们就需要介绍一下ROS中的通信机制了。
ROS 中的基本通信机制主要有如下三种实现策略:
- 话题通信(发布订阅模式)
- 服务通信(请求响应模式)
- 参数服务器(参数共享模式)
2.1 话题通信
话题通信是ROS中使用频率最高的一种通信模式,话题通信是基于发布订阅模式的,也即:一个节点发布消息,另一个节点订阅该消息。话题通信的应用场景也极其广泛,比如下面一个常见场景:
机器人在执行导航功能,使用的传感器是激光雷达,机器人会采集激光雷达感知到的信息并计算,然后生成运动控制信息驱动机器人底盘运动。
在上述场景中,就不止一次使用到了话题通信。
- 以激光雷达信息的采集处理为例,在 ROS 中有一个节点需要时时的发布当前雷达采集到的数据,导航模块中也有节点会订阅并解析雷达数据。
- 再以运动消息的发布为例,导航模块会根据传感器采集的数据时时的计算出运动控制信息并发布给底盘,底盘也可以有一个节点订阅运动信息并最终转换成控制电机的脉冲信号。
以此类推,像雷达、摄像头、GPS… 等等一些传感器数据的采集,也都是使用了话题通信,换言之,话题通信适用于不断更新的数据传输相关的应用场景。
概念
以发布订阅的方式实现不同节点之间数据交互的通信模式。
作用
用于不断更新的、少逻辑处理的数据传输场景。
案例
1.实现最基本的发布订阅模型,发布方以固定频率发送一段文本,订阅方接收文本并输出。(2.1.2 – 2.1.3)
2.实现对自定义消息的发布与订阅。(2.1.4 – 2.1.6)
另请参考:
- http://wiki.ros.org/ROS/Tutorials/CreatingMsgAndSrv
- http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29
- http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28python%29
2.1.1 理论模型
话题通信实现模型是比较复杂的,该模型如下图所示,该模型中涉及到三个角色:
- ROS Master (管理者)
- Talker (发布者)
- Listener (订阅者)
ROS Master 负责保管 Talker 和 Listener 注册的信息,并匹配话题相同的 Talker 与 Listener,帮助 Talker 与 Listener 建立连接,连接建立后,Talker 可以发布消息,且发布的消息会被 Listener 订阅。
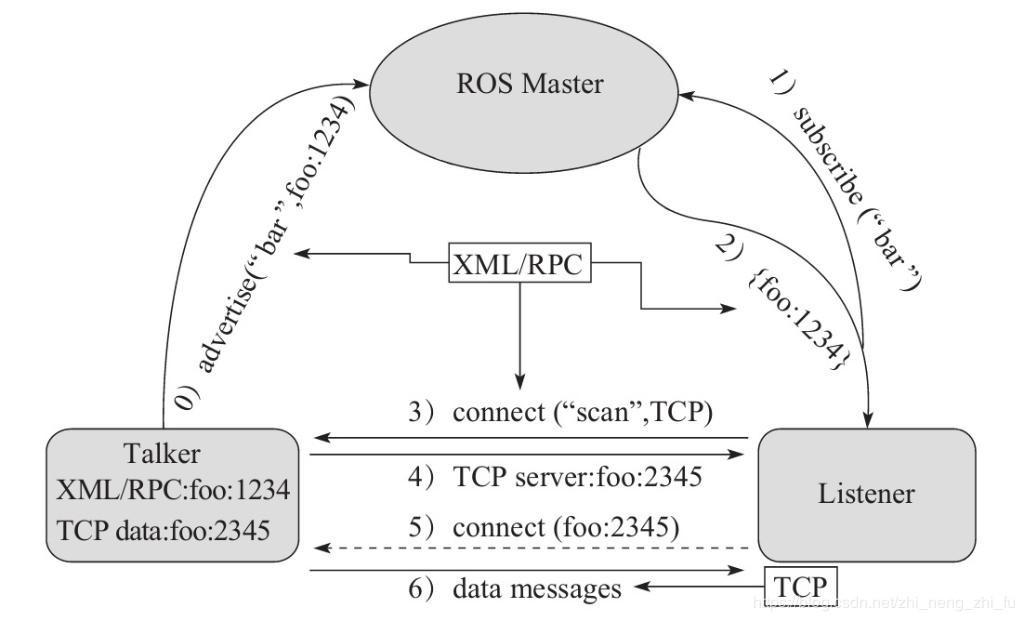 整个流程由以下步骤实现:
整个流程由以下步骤实现:
0.Talker注册
Talker启动后,会通过RPC在 ROS Master 中注册自身信息,其中包含所发布消息的话题名称。ROS Master 会将节点的注册信息加入到注册表中。
1.Listener注册
Listener启动后,也会通过RPC在 ROS Master 中注册自身信息,包含需要订阅消息的话题名。ROS Master 会将节点的注册信息加入到注册表中。
2.ROS Master实现信息匹配
ROS Master 会根据注册表中的信息匹配Talker 和 Listener,并通过 RPC 向 Listener 发送 Talker 的 RPC 地址信息。
3.Listener向Talker发送请求
Listener 根据接收到的 RPC 地址,通过 RPC 向 Talker 发送连接请求,传输订阅的话题名称、消息类型以及通信协议(TCP/UDP)。
4.Talker确认请求
Talker 接收到 Listener 的请求后,也是通过 RPC 向 Listener 确认连接信息,并发送自身的 TCP 地址信息。
5.Listener与Talker件里连接
Listener 根据步骤4 返回的消息使用 TCP 与 Talker 建立网络连接。
6.Talker向Listener发送消息
连接建立后,Talker 开始向 Listener 发布消息。
注意1:上述实现流程中,前五步使用的 RPC协议,最后两步使用的是 TCP 协议
注意2: Talker 与 Listener 的启动无先后顺序要求
注意3: Talker 与 Listener 都可以有多个
注意4: Talker 与 Listener 连接建立后,不再需要 ROS Master。也即,即便关闭ROS Master,Talker 与 Listern 照常通信。


















 177
177

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









