






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
扩展卡尔曼滤波(EKF)是一种常见的非线性状态估计方法。它使用泰勒展开线性化系统并更新状态估计与协方差。为了在EKF中引入神经网络训练,我们需要理解如何结合两者的特征。这里有几个方向可以考虑:
1. **用于建模非线性系统的神经网络**:
神经网络可以用于学习系统的动态模型,即状态转移函数和观测函数。在扩展卡尔曼滤波中,这些函数的精确性至关重要,使用神经网络来训练这些函数可以改善对复杂非线性系统的描述。
- 在训练神经网络时,可以使用EKF预测的状态数据作为输入和输出,来学习系统的动态模型。
- 一旦神经网络经过训练,可以将其用于EKF中,以提供系统的预测和观测模型。
2. **EKF作为神经网络的训练优化器**:
EKF本质上是一种递归的最小二乘优化算法,可以将其用于神经网络的权重更新。这个过程被称为“扩展卡尔曼滤波训练”(EKF training),它用来替代传统的梯度下降算法进行神经网络训练。
- 在这种方法中,EKF通过跟踪权重的协方差来调整学习率和方向,从而提供更稳定的权重更新。
- 这可能在较小的网络中表现良好,因为EKF计算代价较高,适合于相对简单的模型。
3. **用于状态估计的神经网络**:
在状态估计中,神经网络可以作为EKF的辅助器,用于处理高维数据或者复杂的观察模型。
- 例如,使用卷积神经网络来处理图像数据,然后将输出作为EKF的观测输入,从而实现基于视觉的状态估计。
- 神经网络还可以用于降维处理,特别是当观测数据维度很高时,这有助于降低EKF的计算复杂性。
在这些方向中,你可以选择最符合你的研究目标的方式进行研究。在开始研究之前,确保你了解EKF和神经网络的基础知识,以及它们如何组合以实现目标。
这些都是用于状态估计的技术和算法。BP神经网络(Backpropagation Neural Network)是一种常见的机器学习算法,可以用于预测和分类任务,包括状态估计。扩展卡尔曼滤波(Extended Kalman Filter, EKF)和UKF(Unscented Kalman Filter)是用于非线性系统状态估计的经典滤波器,UKF结合了EKF的优点,并对非线性性能有更好的处理。粒子滤波(Particle Filter, PF)是一种基于蒙特卡罗方法的状态估计技术,特别适用于非线性和非高斯的系统。
如果你在研究这些技术在状态估计方面的应用,可能会涉及到以下方面:
1. **BP神经网络在状态估计中的应用**:可以用于非线性系统的状态预测或者分类任务,比如基于历史数据来预测某个系统的状态变化。
2. **扩展卡尔曼滤波和UKF+BP**:这种结合可以用于解决非线性系统的状态估计问题,UKF提供了对非线性性能的更好处理,而BP神经网络可以用来进一步优化估计结果或者处理更复杂的系统模型。
3. **粒子滤波在轨迹估计中的应用**:粒子滤波适用于非线性、非高斯的系统,并且可以用于跟踪目标的轨迹估计,比如在目标追踪、无人车导航等领域。
📚2 运行结果
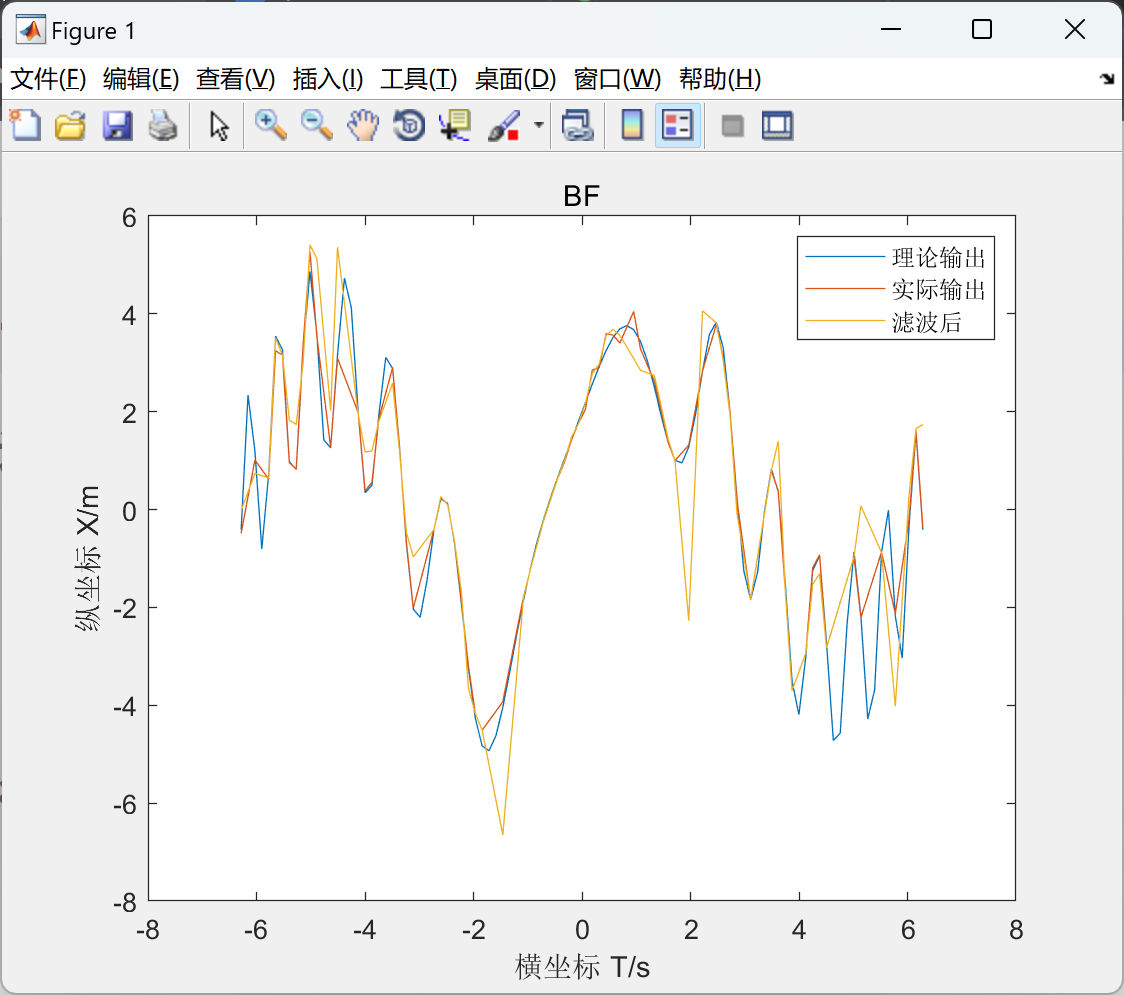
2.1 BP
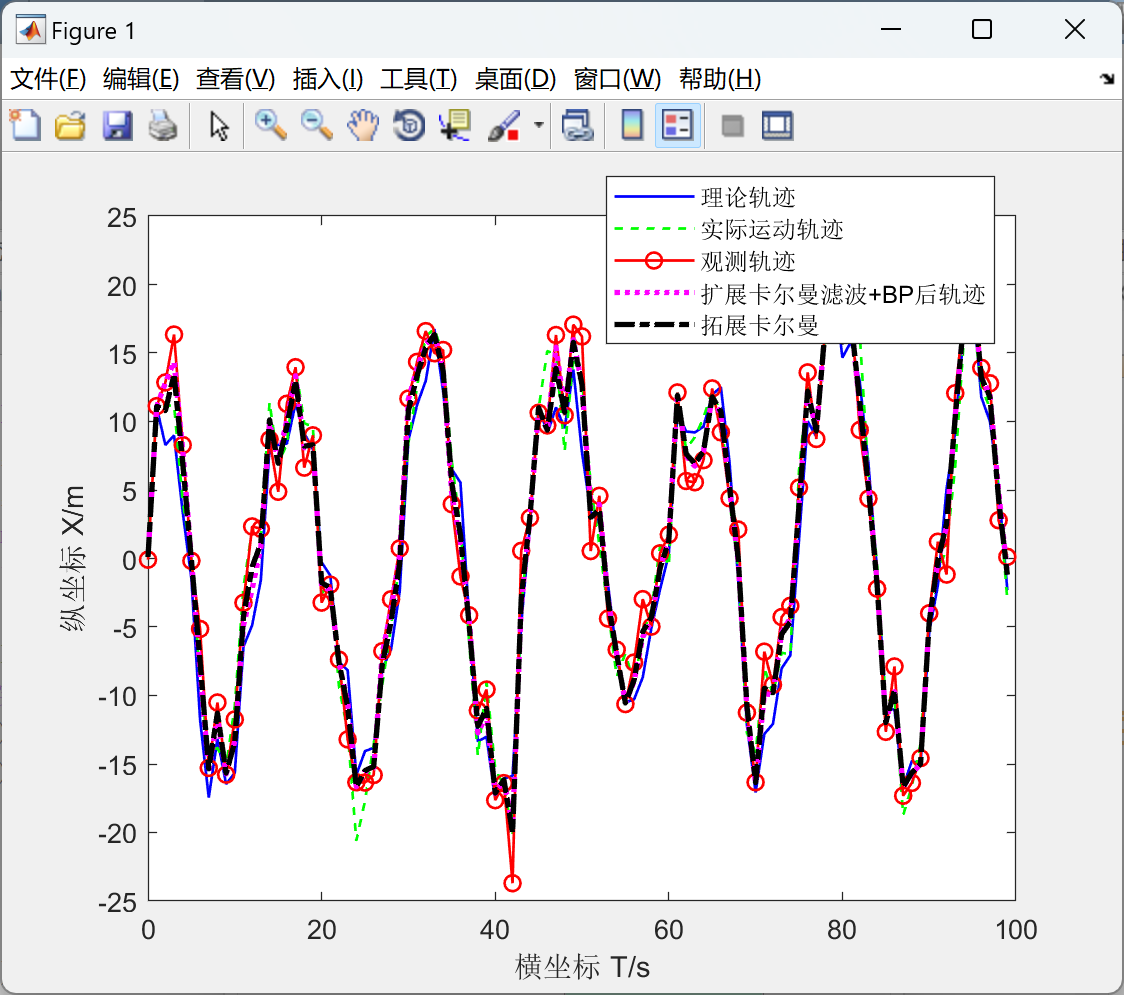
2.2 扩展卡尔曼滤波EKF+BP
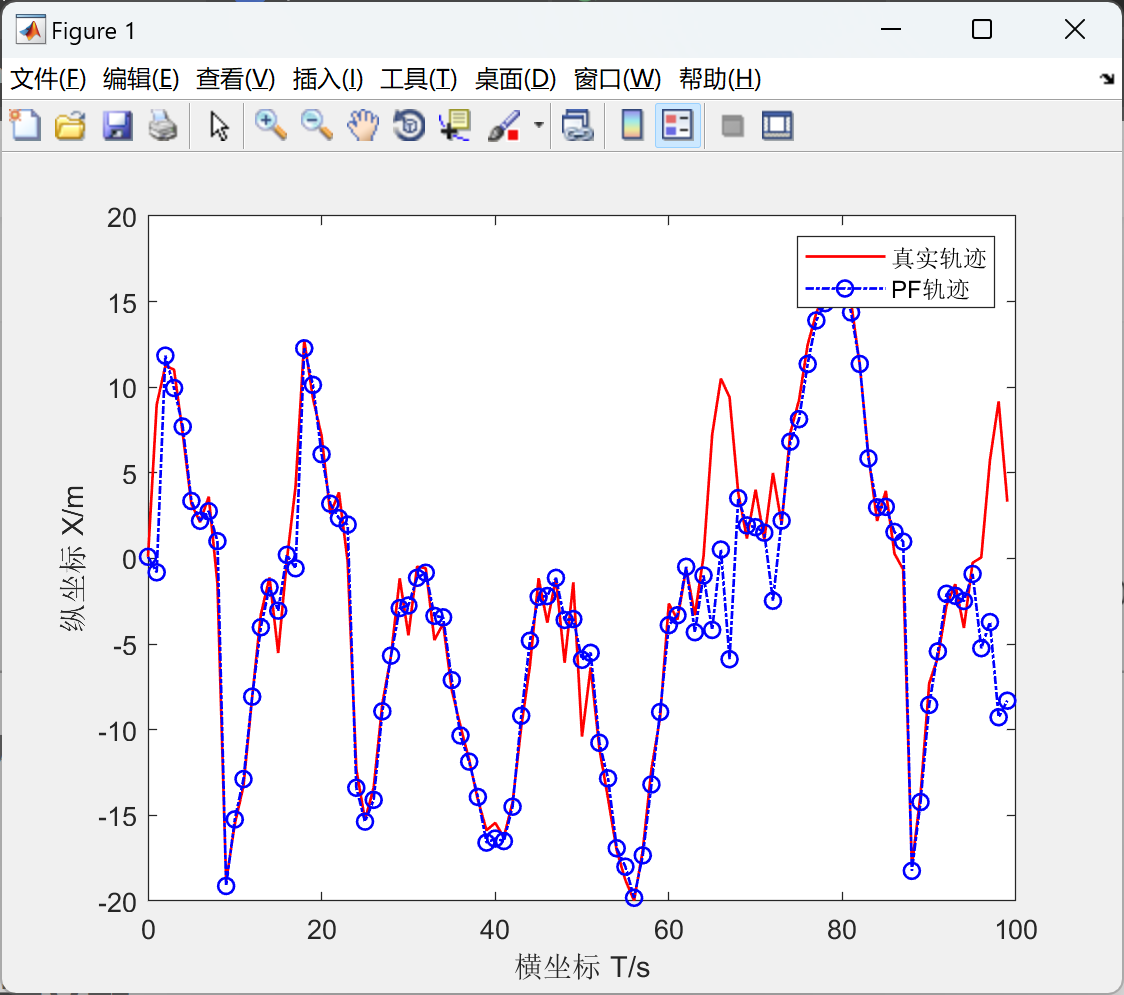
2.3 粒子滤波PF

部分代码:
%误差分析
for i=1:N
Err_Obs(i)=RMS(x(:,i),z(:,i));%滤波前的误差
Err_EKF(i)=RMS(x(:,i),Xekf(:,i));%滤波后的误差
Err_EKF1(i)=RMS(x(:,i),Xekf_1(:,i));%滤波后的误差
end
mean_Obs=mean(Err_Obs);
mean_EKF=mean(Err_EKF);
mean_EKF1=mean(Err_EKF1);
% t = 2 : N;
% figure;
% plot(t,x(1,t),'b',t,Xekf(1,t),'r*');
% legend('真实值','EKF估计值');
figure
hold on;box on;
t=(0:1:N-1);
plot(t,s(1,:),'b','LineWidth',1);%理论轨迹
plot(t,x(1,:),'--g','LineWidth',1);%实际轨迹
plot(t,z(1,:),'-or','LineWidth',1);%观测轨迹
plot(t,Xekf(1,:),':m','LineWidth',2);%卡尔曼滤波轨迹
plot(t,Xekf_1(1,:),'-.k','LineWidth',2);%卡尔曼滤波轨迹
% M=M';
% plot(M(1,:),'k','LineWidth',1);%一步预测轨迹
legend('理论轨迹','实际运动轨迹','观测轨迹','扩展卡尔曼滤波+BP后轨迹','拓展卡尔曼');
xlabel('横坐标 T/s');
ylabel('纵坐标 X/m');
figure
hold on;box on;
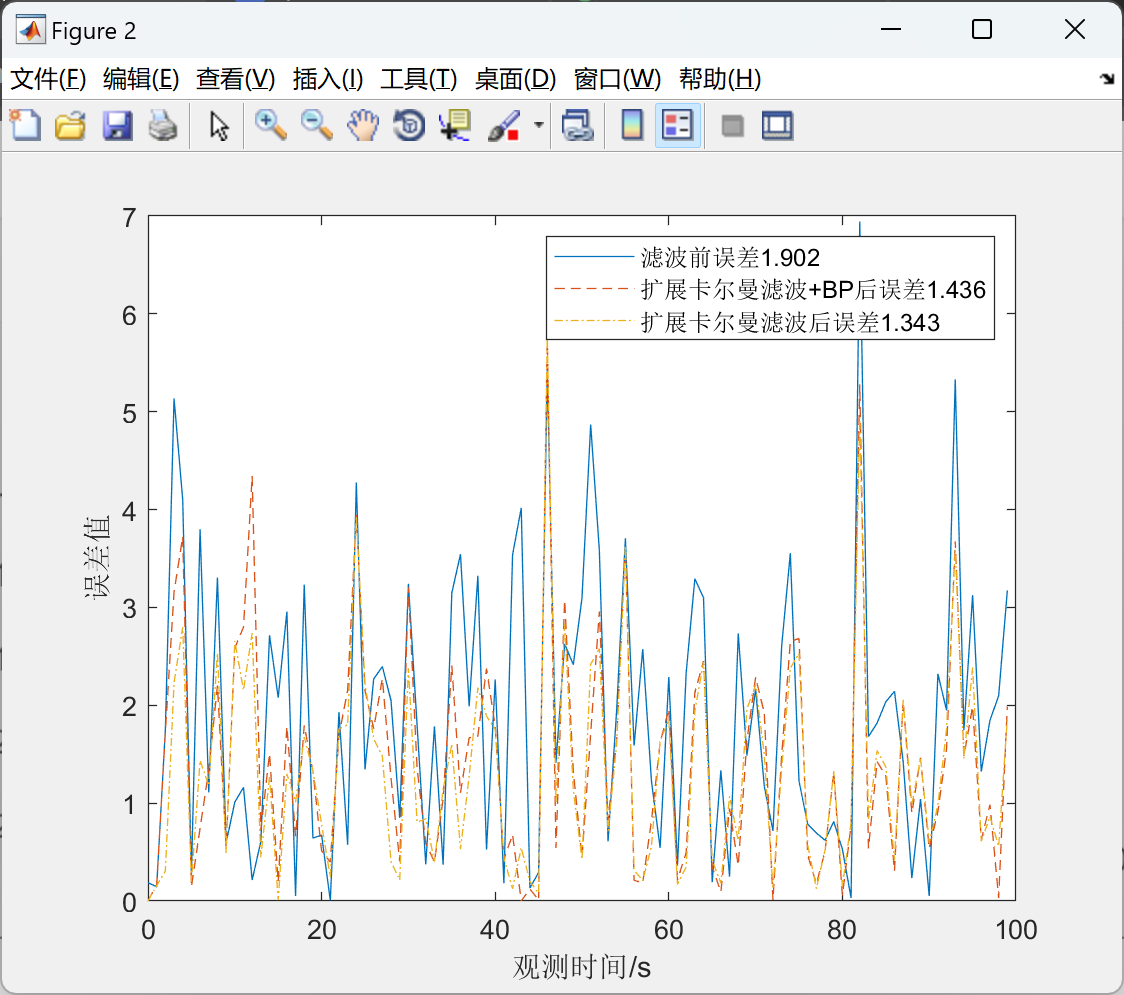
plot(t,Err_Obs,'-');
plot(t,Err_EKF,'--');
plot(t,Err_EKF1,'-.');
% legend('滤波前误差',num2str(mean_Observation),'基本滤波后误差','固定增益滤波后误差');
legend(sprintf('滤波前误差%.03f',mean_Obs),sprintf('扩展卡尔曼滤波+BP后误差%.03f',mean_EKF),sprintf('扩展卡尔曼滤波后误差%.03f',mean_EKF1));
xlabel('观测时间/s');
ylabel('误差值');
% 计算欧氏距离子函数
function dist=RMS(X1,X2)
if length(X2)<=2
dist=sqrt((X1(1)-X2(1))^2);
else
dist=sqrt((X1(1)-X2(1))^2);
end
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]毛鑫萍,李贝,张才强.粒子滤波和正则粒子滤波算法性能研究[J].电声技术, 2014(006):038.
[2]李彩菊,李亚安.扩展卡尔曼滤波和粒子滤波算法性能比较研究[C]//2009年中国西部地区声学学术交流会.2009.DOI:ConferenceArticle/5aa04062c095d722206bc5a8.
[3]王法胜,郭权.基于扩展卡尔曼粒子滤波算法的神经网络训练[J].计算机工程与科学, 2010, 32(5):48-50.DOI:10.3969/j.issn.1007130X.2010.
[4]张应博.神经网络训练中的迭代扩展卡尔曼粒子滤波算法[J].微电子学与计算机, 2010(8):5.DOI:CNKI:SUN:WXYJ.0.2010-08-027.
[5]王法胜,郭权.基于扩展卡尔曼粒子滤波算法的神经网络训练[J].计算机工程与科学, 2010, 32(5):3.DOI:10.3969/j.issn.1007-130X.2010.05.013.














 670
670











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









