






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
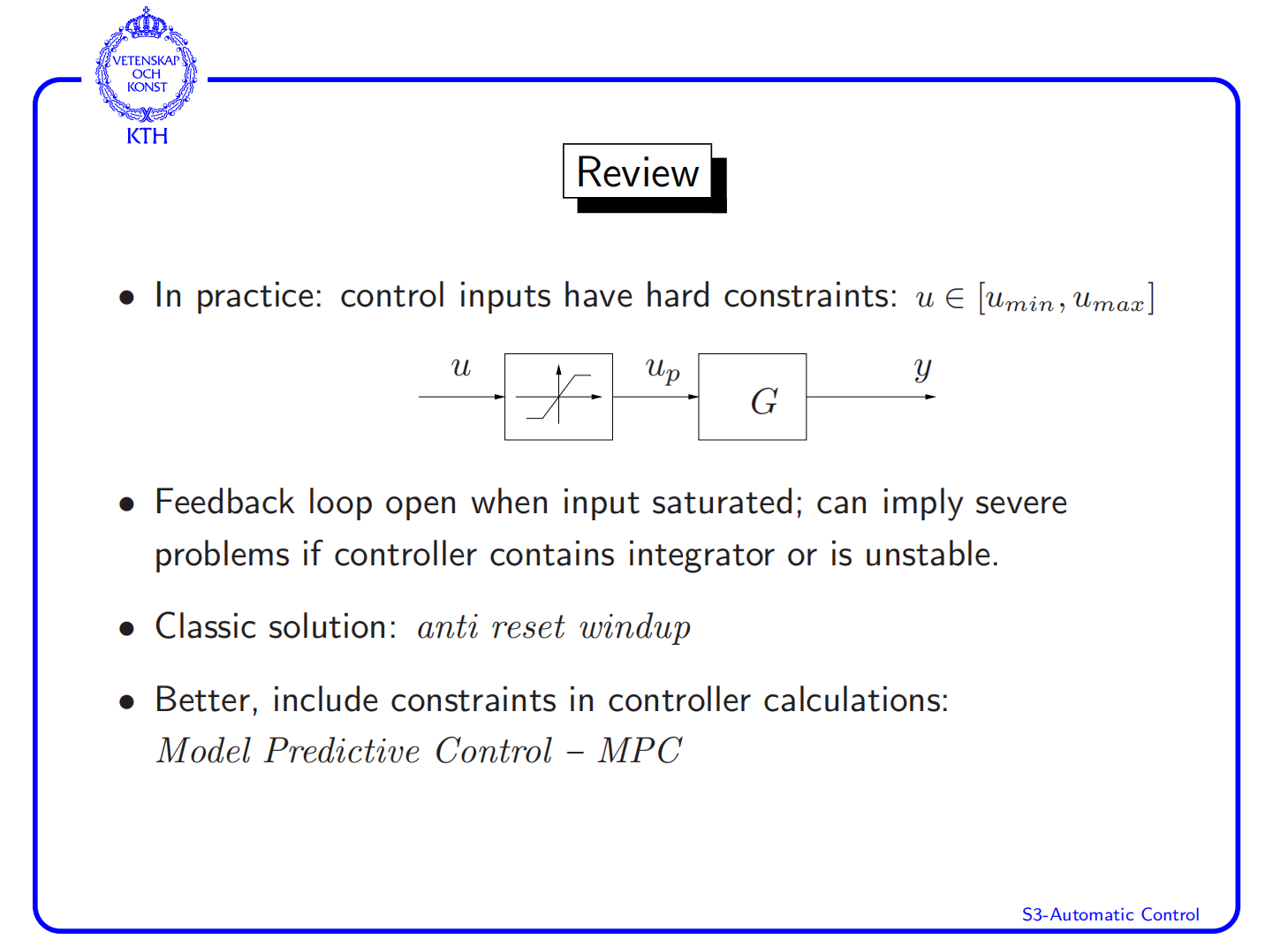
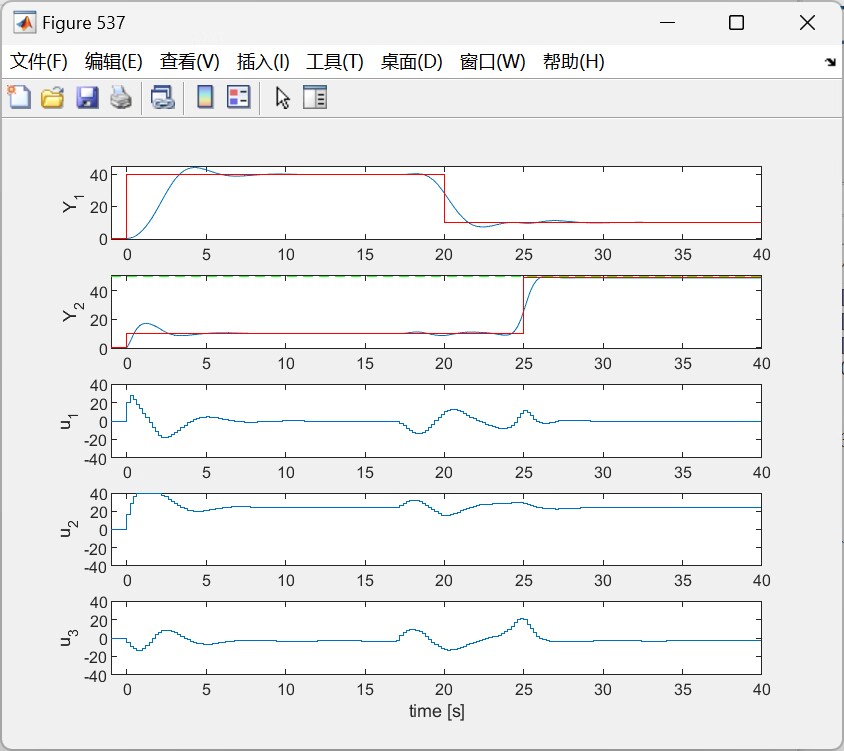
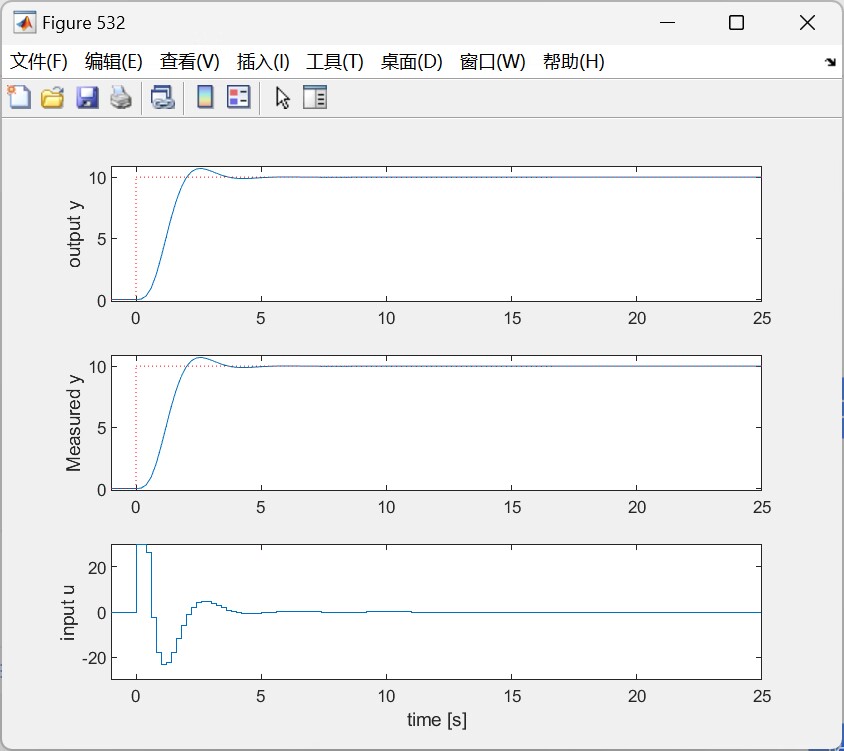
使用二次规划来模拟多输入多输出(MIMO)系统的模型预测控制。这些脚本建立并模拟了一个通用的多输入多输出(MIMO)控制系统的模型预测控制,当线性化状态空间模型(或传递函数)作为函数的输入时。然而,一般情况下,工厂模型可能是非线性的。
二次规划用于使输入和输出变量在所需的时间范围内达到其设定点。
代码的描述如下:
run_MPC.m:设置并运行模拟的主文件。
MPC_simulation.m:通过时间迭代,并实现在每次迭代中找到的当前时间输入变量。
MPC_calculation:基于工厂的线性化模型,解决了具有向前时间范围的二次问题的MPC控制器。
MPC_plant.m:在工厂中实现当前时间输入向量。一般来说,工厂模型可以是非线性的。
Addnoise.m:一个用于根据信号的数量级和噪声百分比(噪声标准差)向主要信号(工厂的输出)添加噪声的函数。
详细文档见第4部分。
📚2 运行结果

部分代码:
% Weightings:
MPC_case.Qy = eye(MPC_case.ny); % Output weight -> state weight for 1<i<Np-1;
MPC_case.Sy = 10*eye(MPC_case.ny); % Terminal weight at i=Np
MPC_case.Qu = 1*eye(MPC_case.nu); % Input weight for 0<i<Np-1
% Constraints (implemented as hard here):
MPC_case.umin = -40*ones(MPC_case.nu,1);
MPC_case.umax = 40*ones(MPC_case.nu,1);
MPC_case.ymin = -50*ones(MPC_case.ny,1);
MPC_case.ymax = [50; 50];
MPC_case.delta_u_min = -5*ones(MPC_case.nu,1);
MPC_case.delta_u_max = 20*ones(MPC_case.nu,1);
MPC_case.xmin = [-1e6*ones(MPC_case.nx,1); MPC_case.umin];
MPC_case.xmax = [1e6*ones(MPC_case.nx,1); MPC_case.umax];
% References for outputs, states and inputs:
MPC_case.yref_all = @(t)[(t<20)*40+(t>=20)*10; (t<25)*10+(t>=25)*49]; % Reference for 0<i<Np-1
% Horizon is Np (both for objective function and for constraints);
MPC_case.Np = 15;
% assign x0 and t_end
MPC_case.x0 = zeros(MPC_case.nx+MPC_case.nu,1); % First state value is zero
MPC_case.t_end = 40;
% Noise
MPC_case.noise_order = 100;
MPC_case.noise_percent = 0;
%% Run MPC
[U,X,Y,Y_measured] = MPC_simulation_delta_u(MPC_case);
%% plot results
t = 0:MPC_case.Ts:MPC_case.t_end;
t = [-1 t];
y1 = [0 0 Y(1,:)];
y2 = [0 0 Y(2,:)];
yref = MPC_case.yref_all(t);
yref(:,1) = [0; 0];
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
🌈4 Matlab代码、文档
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取
















 9214
9214











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









