






Canny边缘检测算子(Canny,1986)是一个在工程中广泛应用的多阶段边缘检测方法,该方法提出了判定边缘检测效果的三个准则:
a)低错误率准则:即尽可能的标识出目标的真实边缘,同时降低噪声产生的干扰,Canny算子认为当信噪比达到最高值时,边缘提取的质量最优;
b)高定位性准则:需要检测到的边缘与真实的边缘尽可能的接近;
c)单边响应准则:图像中的边缘应该只被标记一次,并尽可能的抑制虚假边缘的出现。
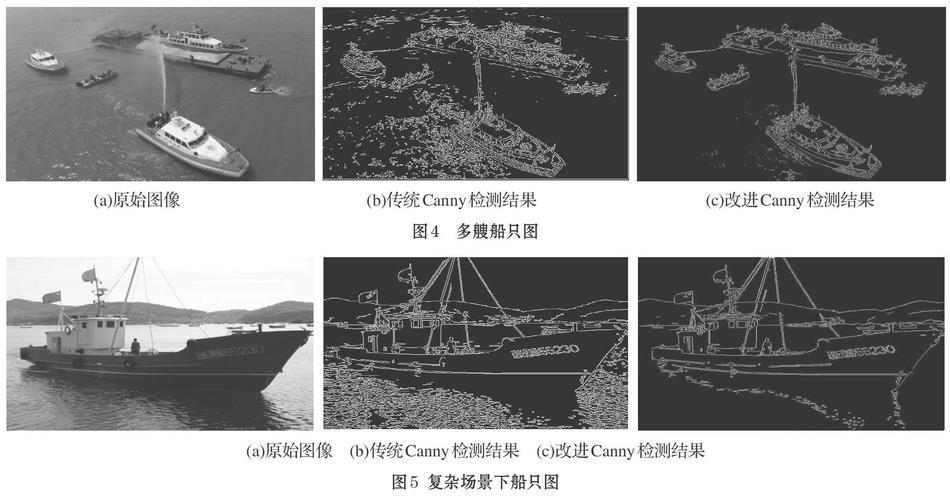
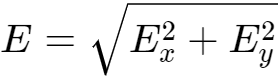
Canny算法的本质就是通过数学方法来对上述三个准则进行描述。因此,相比于传统Sobel、Prewitt等边缘检测算法,Canny算子具有更高的信噪比和检测精度。Canny边缘检测方法主要分为5个步骤:
首先使用高斯滤波器平滑图像,滤除图像中的噪声干扰。为了降低计算强度往往将二维高斯函数G(x,y)分解为两个一维高斯函数G(x)和Gy)分别对原始图像f(x,y)进行卷积得到平滑后的图像I(x,y)。

对图像完成高斯平滑后,要计算图像中每一个像素点梯度幅值强度和方向。利用2×2邻域的一阶有限差分滤波器计算平滑后的图像,可以分别得到滤波器沿x方向和y方向作用的结果Ex和Ey,梯度的幅值E和方向 为:
为:
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









