






摘要:
针对考虑车辆行驶不确定性的轨迹分布准确快速预测问题,提出了一种融合时空特征的多模态车辆轨 迹预测方法(GCNTA)。首先,利用空间关联度系数和图卷积神经网络(GCN)实现空间关联特征提取。 其次,构建具有时间注意力机制的时域卷积网络(TCN)完成时间特征提取。然后,通过特征融合门控单元 实现每个时间步长对应时空特征的自适应融合,并利用门控循环单元(GRU)网络构建解码器进一步生成未 来车辆轨迹的概率分布。
1 问题描述
1.1 多模态轨迹预测建模
车辆轨迹预测可定义为:给定所有邻近车 辆在过去时间范围 T 上的位置 X ,其目标是预测它们 在未来时间范围 H 中的轨迹分布 Y 。
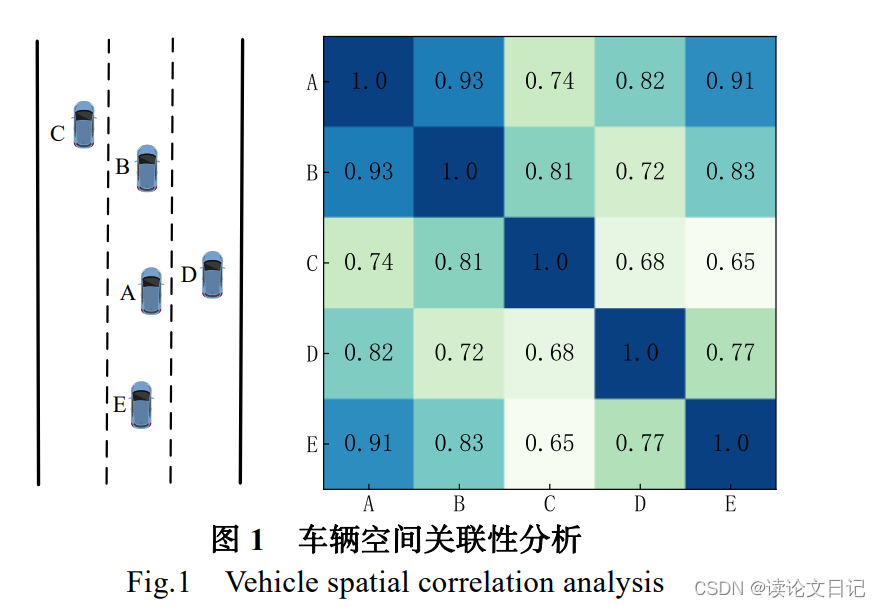
1.2 车辆空间关联度分析
使用协方差作相关系数
2 GCNTA 多模态轨迹预测模型
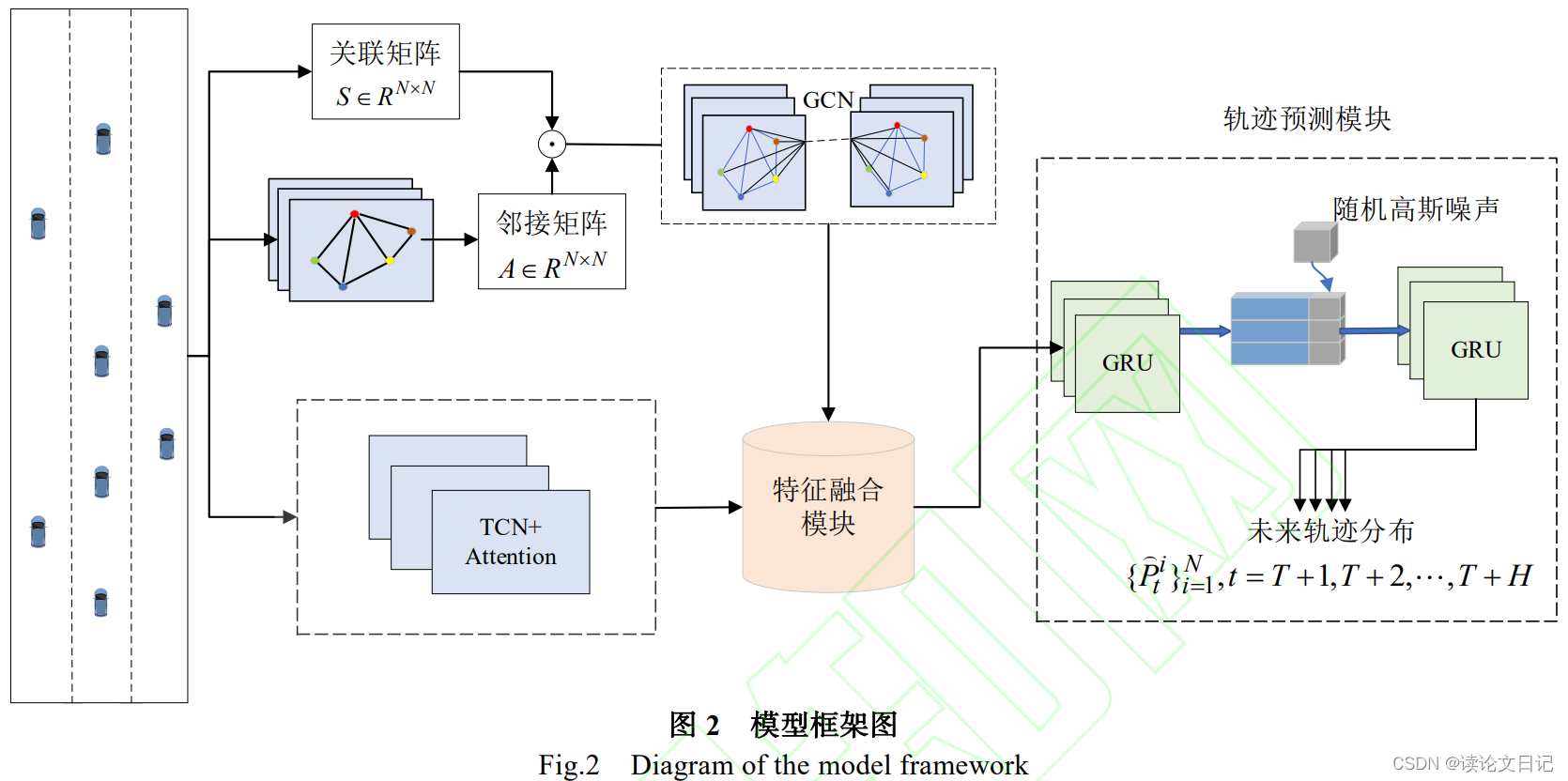
2.1 空间图卷积模块
将空间相关矩阵 S 与图的邻接矩阵 A 进行聚合, 得到空间相关矩阵 .
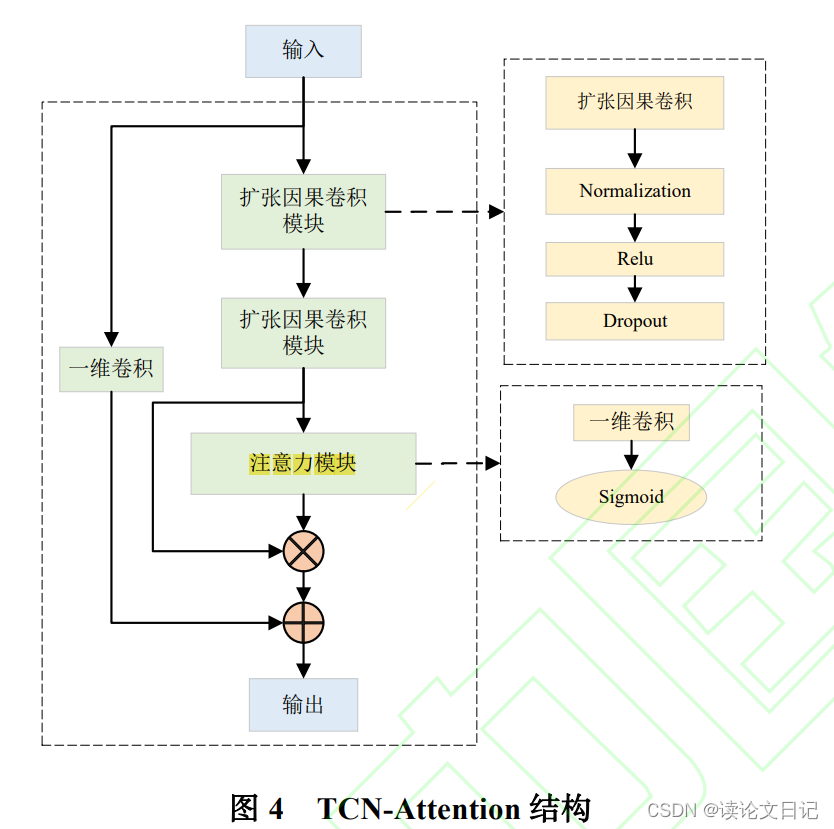
2.2 时间特征提取模块
GCNTA 模型的时间特征提取由添加注意力机制的 TCN-Attention 模块组成.
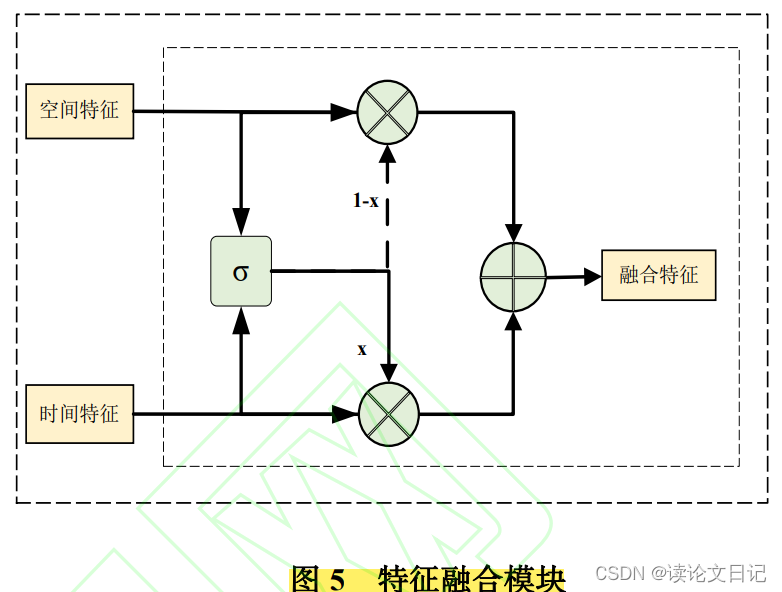
2.3 时空特征融合模块
2.4 轨迹预测模块
为使网络具有更高的泛化性能和鲁棒性,在隐向量中加入随机高斯噪声Z
3 仿真实验与结果分析
无















 2371
2371











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









