







基于STM32单片机的PWM电机调速毕业论文
摘要
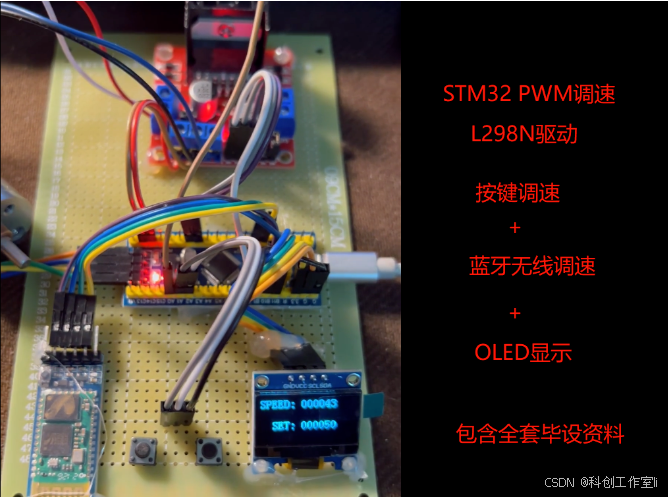
本文旨在研究基于STM32单片机的PWM电机调速系统,采用L298N电机驱动器来控制直流电机的转速,并通过OLED显示屏实时显示当前转速和设定转速。该系统结合了单片机控制、PWM调速技术和显示技术,实现电机转速的精确控制和直观显示。本文详细阐述了系统的硬件设计、工作原理、实现方法以及实验结果,验证了系统的可行性和可靠性。
引言
随着现代工业和电子技术的快速发展,电机调速系统已成为各类自动化设备和智能系统中的关键组件。PWM(脉冲宽度调制)技术作为一种有效的调速手段,在电机控制领域得到了广泛应用。本文利用STM32单片机和L298N电机驱动器,设计并实现了一种基于PWM的电机调速系统,并通过OLED显示屏实时显示转速信息,为电机控制提供了一种新的解决方案。
系统硬件设计
- STM32单片机:作为系统的核心控制器,负责生成PWM信号、读取传感器数据、处理用户输入以及控制OLED显示屏。
- L298N电机驱动器:一款双路H桥电机驱动器,可驱动两路直流电机或一路步进电机,具有最大输出电流2A、峰值电流3A的能力,内置过流、过热和欠压保护。
- 直流电机:作为被控对象,通过L298N驱动器接收PWM信号实现转速调节。
- OLED显示屏:用于实时显示当前转速和设定转速,采用0.96寸高分辨率模块,提供多种接口方式。
工作原理
- PWM调速原理:PWM波形由一系列周期性重复的脉冲组成,每个脉冲的宽度(占空比)可以变化。通过改变PWM波形的占空比,可以调节电机驱动器的平均输出电压,从而影响电机的转速。占空比越大,平均输出电压越高,电机的转速也越高。
- STM32单片机生成PWM信号:利用STM32单片机的定时器模块生成PWM信号,通过配置定时器的时钟频率和比较值,可以控制PWM信号的频率和占空比。
- L298N驱动器控制电机:STM32单片机将生成的PWM信号输出到L298N驱动器的控制引脚,通过改变PWM信号的占空比来调节电机的转速。
- OLED显示转速信息:STM32单片机通过读取传感器数据或计算得到当前转速,并将当前转速和设定转速信息发送到OLED显示屏进行实时显示。
实现方法
- 系统初始化:包括STM32单片机的时钟配置、GPIO端口初始化、定时器配置以及OLED显示屏的初始化。
- PWM信号生成:配置STM32单片机的定时器模块,生成具有指定频率和占空比的PWM信号。
- 电机控制:将PWM信号输出到L298N驱动器的控制引脚,通过改变PWM信号的占空比来调节电机的转速。同时,通过控制L298N驱动器的其他引脚实现电机的正反转和制动。
- 转速测量与显示:利用传感器或计算方法获取当前转速信息,并通过OLED显示屏实时显示当前转速和设定转速。
实验结果与分析
- 功能验证:通过实际测试,验证了系统能够正确生成PWM信号、控制电机转速以及实时显示转速信息。
- 性能评估:测试了不同占空比下电机的转速变化,验证了PWM调速的准确性和稳定性。同时,评估了OLED显示屏的刷新速度和显示效果。
- 可靠性分析:对系统进行了长时间运行测试,验证了系统的可靠性和稳定性。在测试过程中,系统未出现任何异常或故障。
结论
本文设计并实现了一种基于STM32单片机和L298N驱动器的PWM电机调速系统,并通过OLED显示屏实时显示当前转速和设定转速。该系统具有结构简单、控制精确、显示直观等优点,为电机控制提供了一种新的解决方案。实验结果表明,该系统具有良好的性能和可靠性,具有一定的实用价值和应用前景。
致谢
感谢指导老师的悉心指导和帮助,感谢实验室同学们的支持和协助。
参考文献
在撰写基于STM32单片机的PWM电机调速系统的详细代码时,需要注意代码的结构清晰、注释详尽,并且考虑到代码的可读性和可维护性。以下是一个简化的代码示例,它展示了如何配置STM32的PWM输出、读取编码器(假设用于测量电机转速)的数据、通过L298N驱动电机,并在OLED显示屏上显示当前转速和设定转速。由于实际项目中涉及的硬件配置和库函数可能有所不同,以下代码需要根据具体的开发环境和硬件进行调整。
代码结构概述
- 包含必要的头文件:包括STM32的HAL库、OLED驱动库、编码器读取库等。
- 定义全局变量:用于存储PWM占空比、当前转速、设定转速等。
- 初始化函数:包括系统时钟初始化、GPIO初始化、PWM初始化、OLED初始化、编码器初始化等。
- 主循环:读取编码器数据计算当前转速,更新OLED显示,根据设定转速调整PWM占空比。
- 中断服务程序(如果需要):处理编码器脉冲中断或其他中断。
示例代码
#include "stm32f4xx_hal.h"
#include "ssd1306.h" // OLED驱动库,需根据实际情况替换
#include "encoder.h" // 编码器读取库,需自定义或引用现有库
// 全局变量定义
TIM_HandleTypeDef htim3; // PWM定时器句柄
uint32_t pwm_duty_cycle = 500000; // 初始PWM占空比(单位:微秒),需转换为定时器计数值
uint32_t current_speed = 0; // 当前转速(单位:转/分)
uint32_t set_speed = 1200; // 设定转速(单位:转/分)
// 函数声明
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM3_Init(void);
void OLED_DisplaySpeed(uint32_t current, uint32_t set);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM3_Init();
SSD1306_Init(); // OLED初始化
Encoder_Init(); // 编码器初始化
// 显示初始信息
OLED_DisplaySpeed(current_speed, set_speed);
while (1)
{
// 读取编码器数据并计算当前转速
current_speed = Encoder_GetSpeed(); // 假设Encoder_GetSpeed()返回当前转速(转/分)
// 更新OLED显示
OLED_DisplaySpeed(current_speed, set_speed);
// 根据设定转速调整PWM占空比(这里简化了控制算法)
uint32_t target_duty_cycle = (pwm_max_value * set_speed) / max_speed; // 假设pwm_max_value和max_speed已定义
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, target_duty_cycle);
HAL_Delay(100); // 延时一段时间,避免频繁更新导致系统负载过高
}
}
// 系统时钟配置函数(需根据具体芯片和时钟需求调整)
void SystemClock_Config(void)
{
// ... 系统时钟配置代码 ...
}
// GPIO初始化函数
static void MX_GPIO_Init(void)
{
// ... GPIO初始化代码,包括PWM输出引脚、编码器引脚等 ...
}
// TIM3初始化函数(PWM定时器)
static void MX_TIM3_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
htim3.Instance = TIM3;
htim3.Init.Prescaler = ...; // 根据系统时钟和所需PWM频率计算
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = pwm_max_value - 1; // 假设pwm_max_value已定义,表示PWM周期的最大计数值
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
HAL_TIM_Base_Init(&htim3);
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig);
HAL_TIM_PWM_Init(&htim3);
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig);
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = pwm_duty_cycle; // 初始占空比
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1);
HAL_TIM_MspPostInit(&htim3);
// 启动PWM输出
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
}
// OLED显示转速函数
void OLED_DisplaySpeed(uint32_t current, uint32_t set)
{
// ... OLED显示代码,根据SSD1306库或其他OLED库实现 ...
// 示例:SSD1306_Fill(SSD1306_COLOR_BLACK); // 清屏
// SSD1306_SetCursor(0, 0);
// SSD1306_WriteString("Current Speed:", Font_11x18, SSD1306_COLOR_WHITE);
// SSD1306_SetCursor(0, 18);
// SSD1306_WriteNumber(current, 4, SSD1306_COLOR_WHITE);
// SSD1306_SetCursor(0, 36);
// SSD1306_WriteString("Set Speed:", Font_11x18, SSD1306_COLOR_WHITE);
// SSD1306_SetCursor(0, 54);
// SSD1306_WriteNumber(set, 4, SSD1306_COLOR_WHITE);
// SSD1306_UpdateScreen(); // 更新屏幕显示
}
// 编码器读取和速度计算函数(需自定义)
uint32_t Encoder_GetSpeed(void)
{
// ... 编码器读取和速度计算代码 ...
// 返回当前转速(转/分)
return 0; // 示例返回0,需替换为实际计算得到的转速
}
// 编码器初始化函数(需自定义)
void Encoder_Init(void)
{
// ... 编码器初始化代码 ...
}
// 注意:以上代码为简化示例,实际项目中需补充和完善相关函数和配置注意事项
- 定时器配置:PWM定时器的配置需要根据实际系统时钟和所需的PWM频率进行调整。
- 编码器读取:编码器读取函数
Encoder_GetSpeed()需要根据具体的编码器类型和接口实现。 - OLED显示:OLED显示函数
OLED_DisplaySpeed()需要根据具体的OLED驱动库和显示要求实现。 - PWM占空比调整:在调整PWM占空比时,需要考虑电机的动态响应和稳定性,可能需要引入PID控制算法等。
- 硬件连接:确保STM32、L298N驱动器、电机、编码器和OLED显示屏之间的硬件连接正确无误。
调试和验证
在编写和调试代码时,建议逐步进行,先验证各个模块的基本功能,再逐步集成和调试整个系统。可以使用STM32CubeMX工具生成初始化代码,并在此基础上进行开发和调试。同时,利用STM32的调试工具(如ST-LINK/V2)和调试软件(如Keil MDK-ARM或STM32CubeIDE)进行代码调试和性能分析。


















 505
505

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











